Download as PDF, PPTX
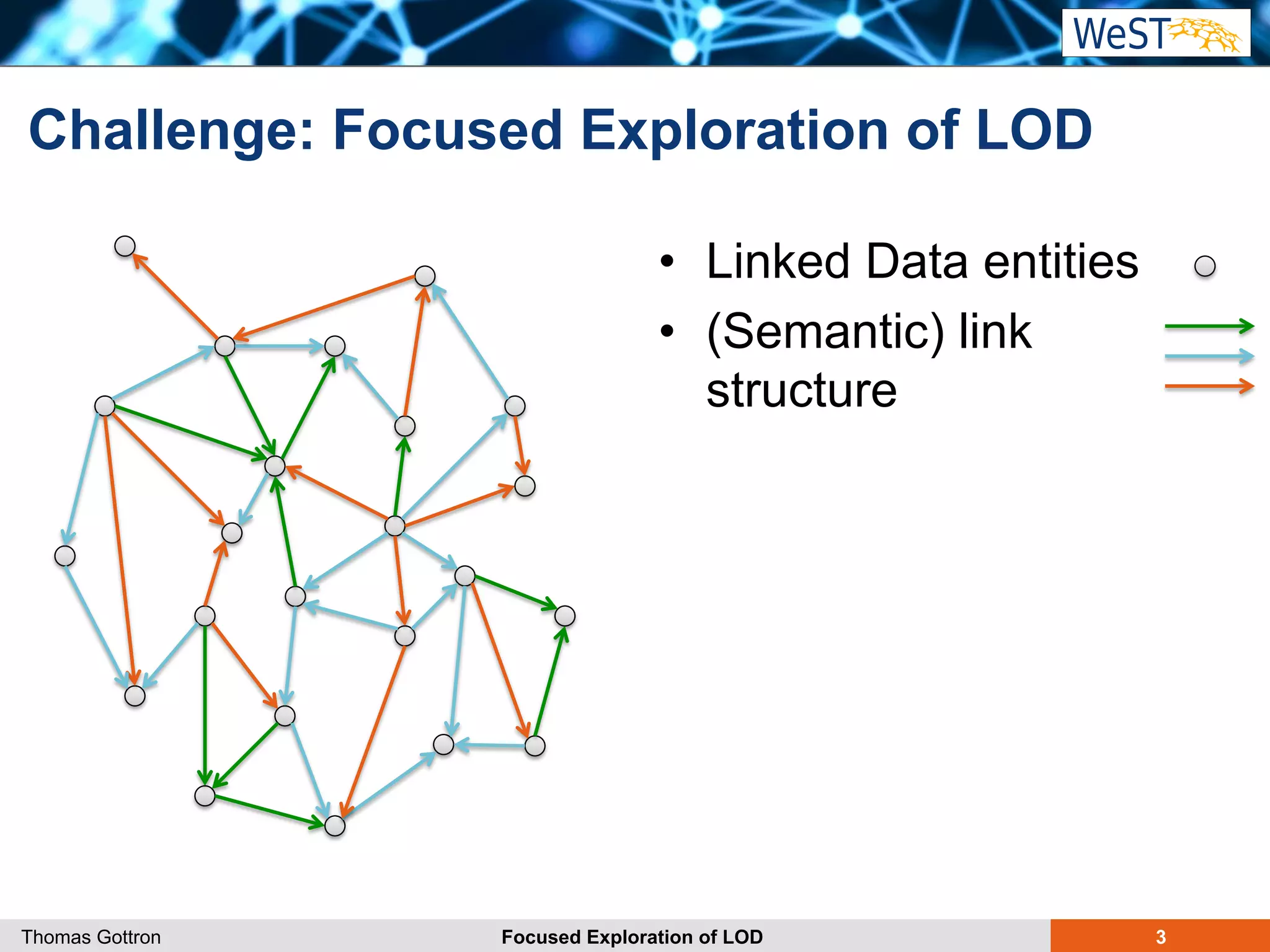
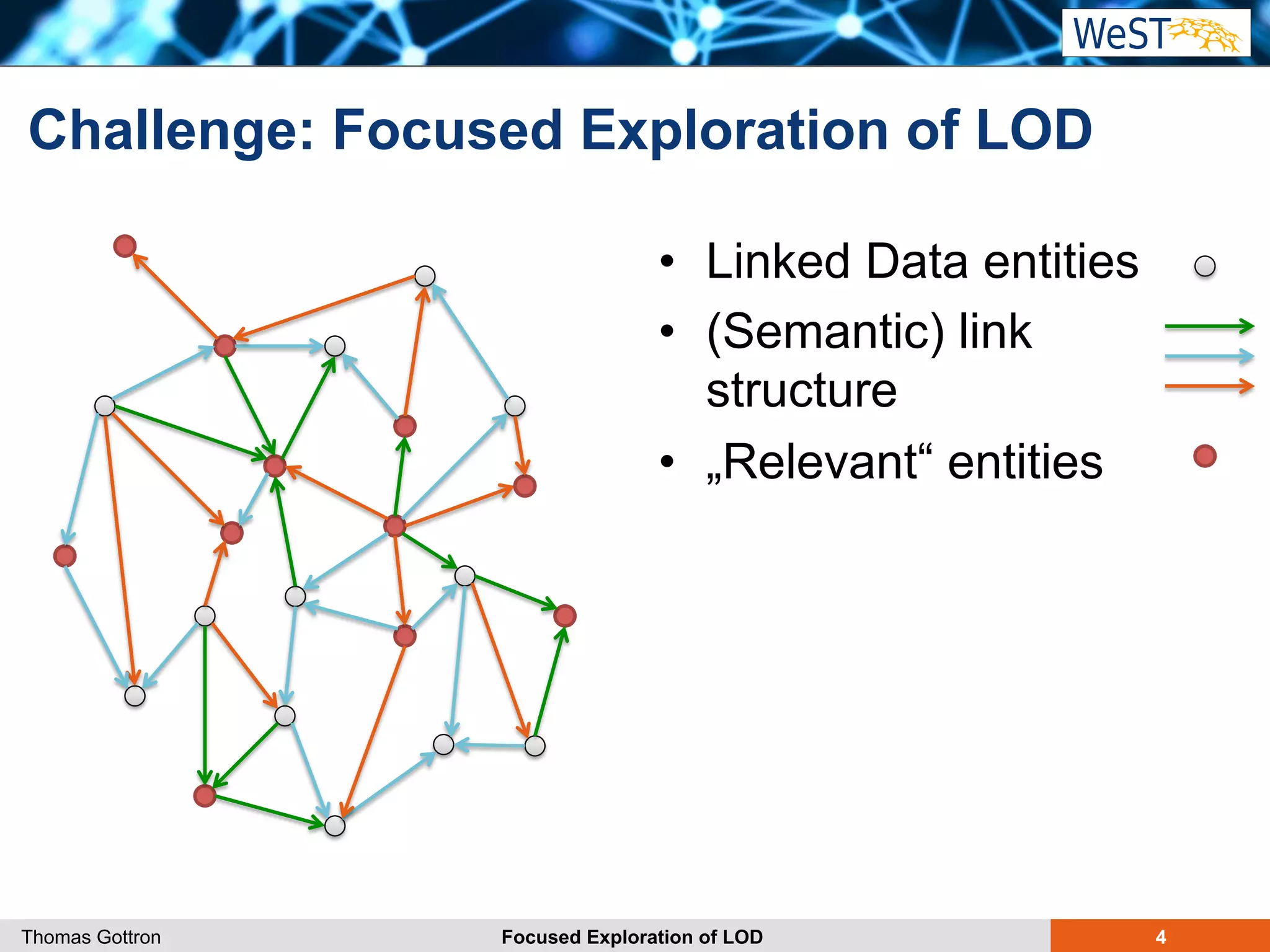
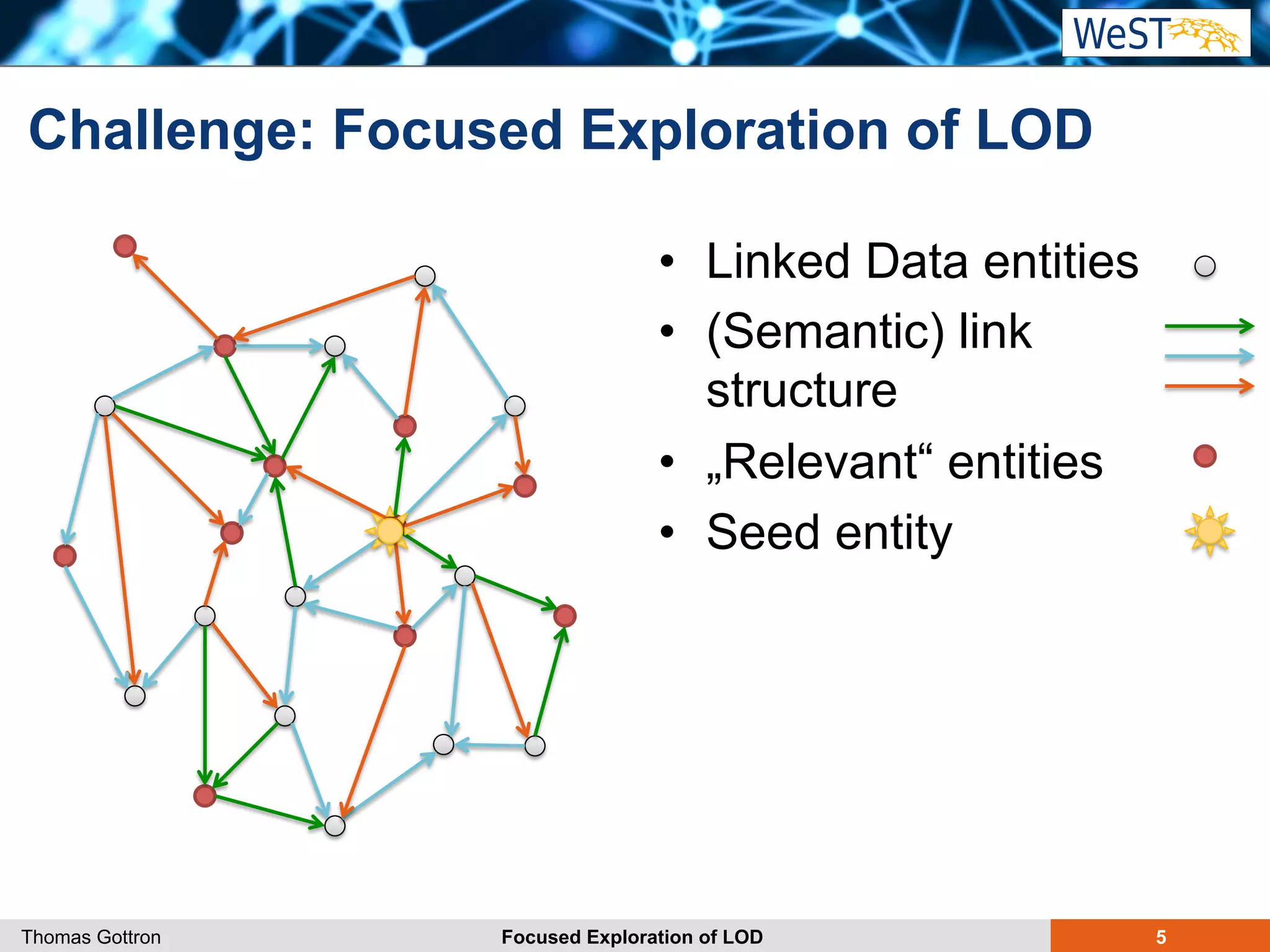
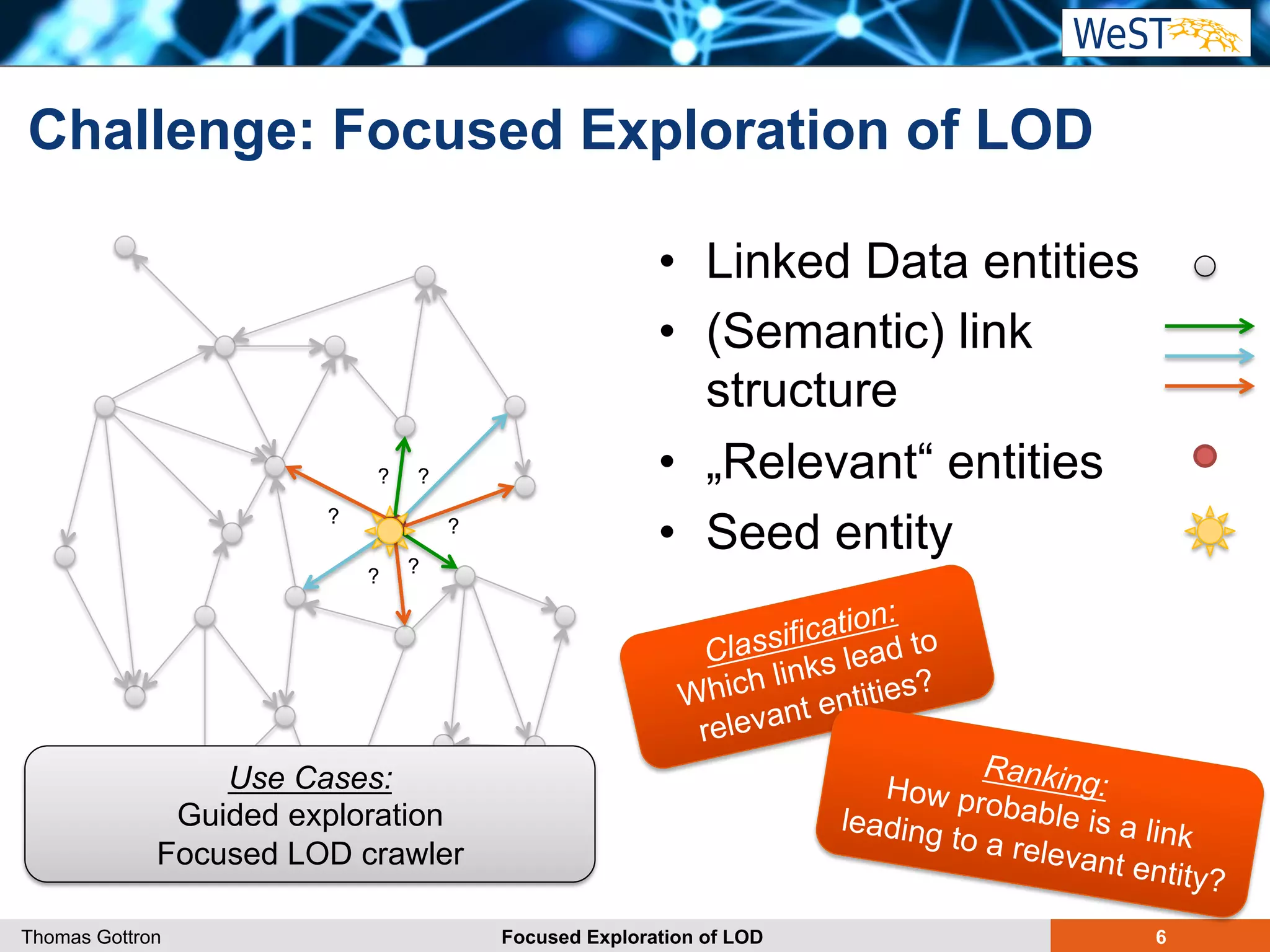
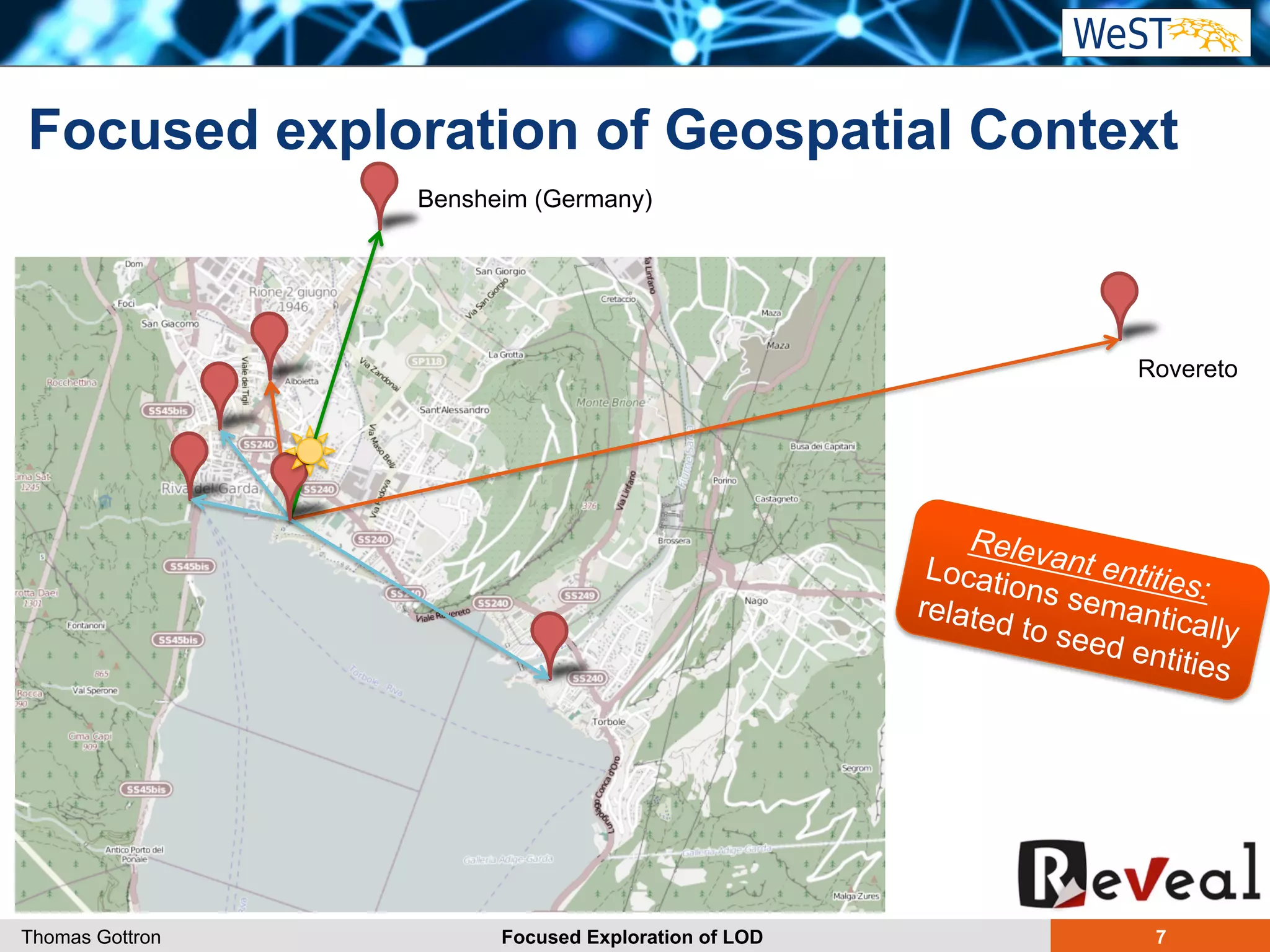
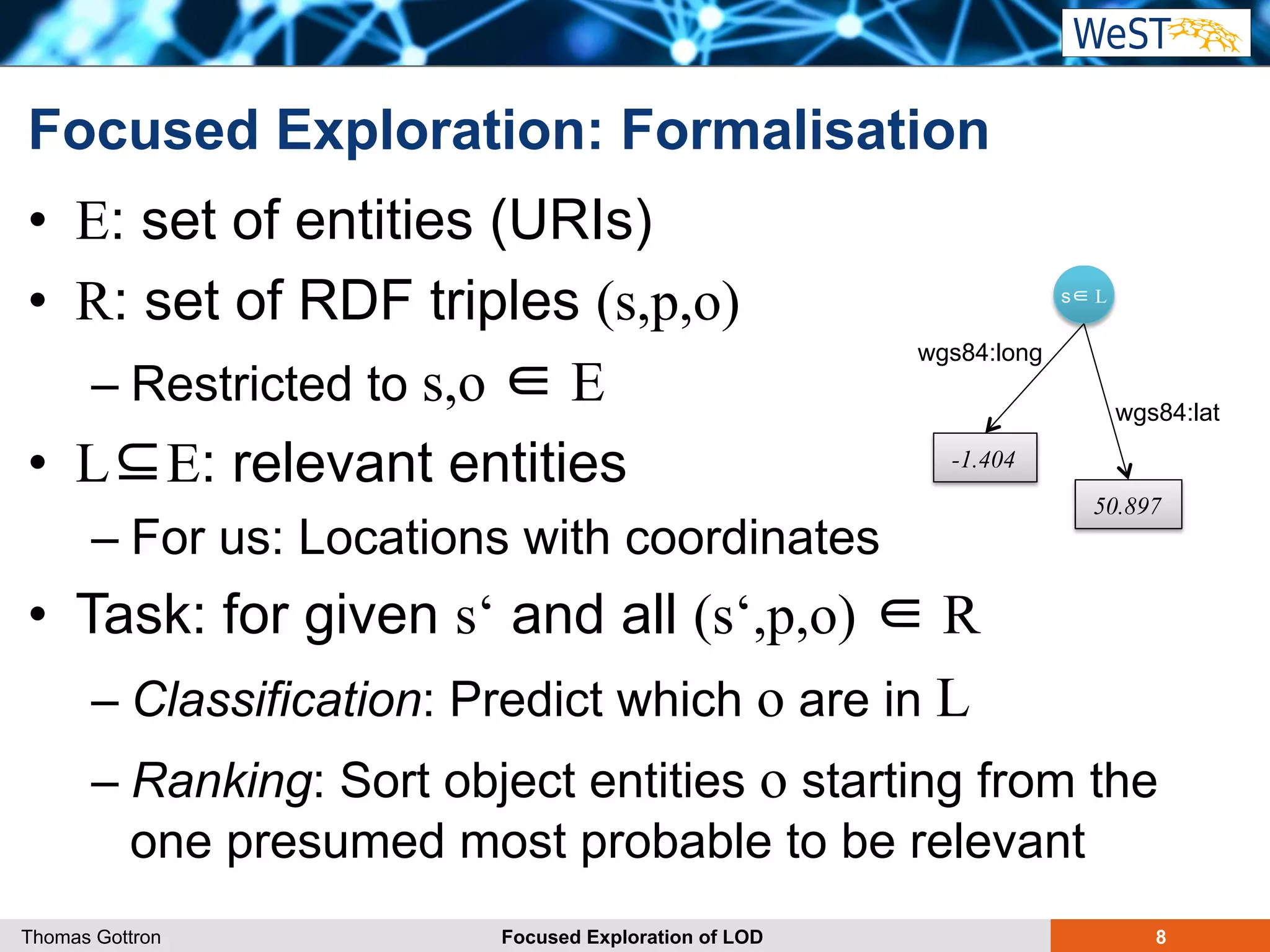
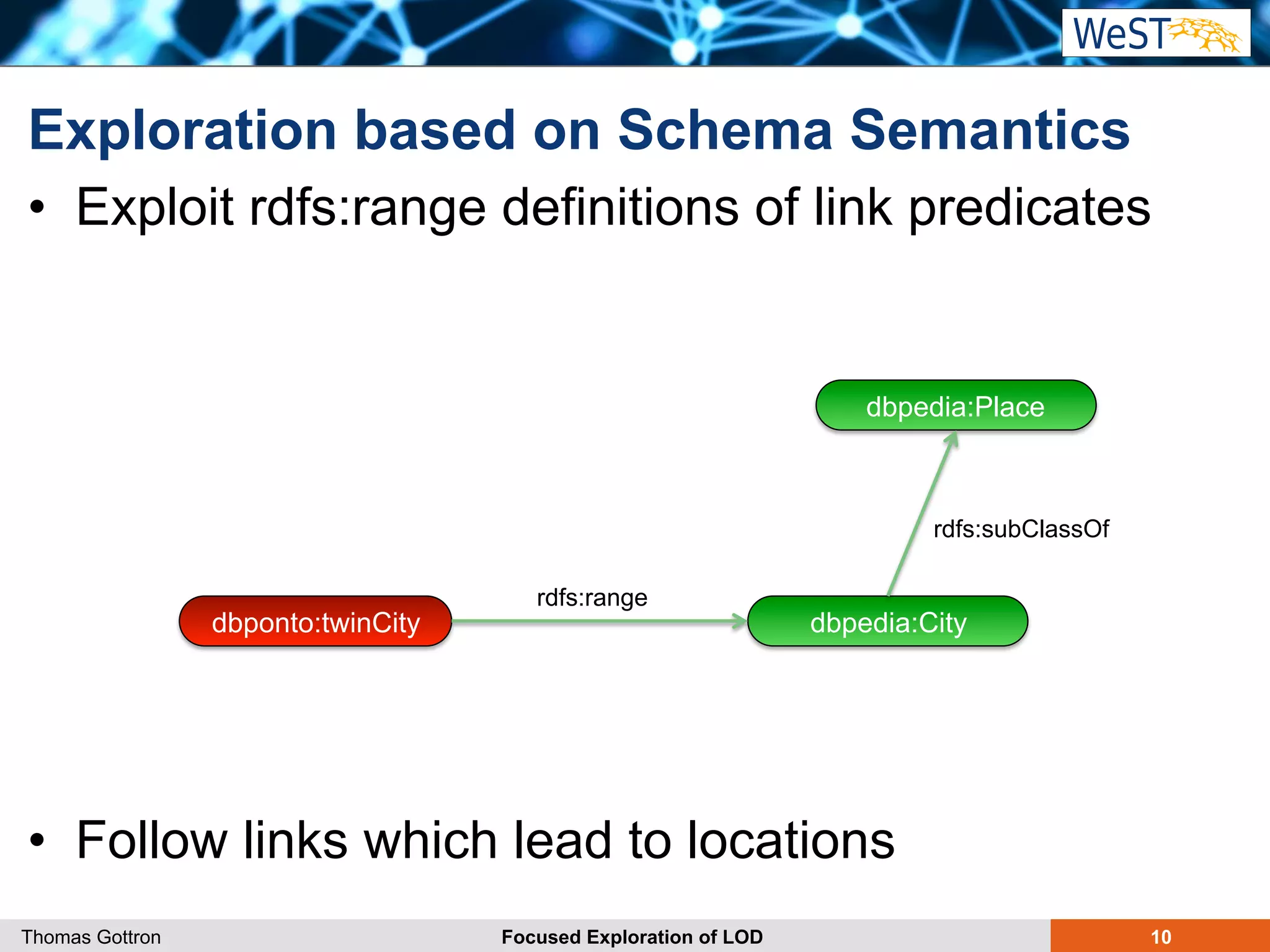
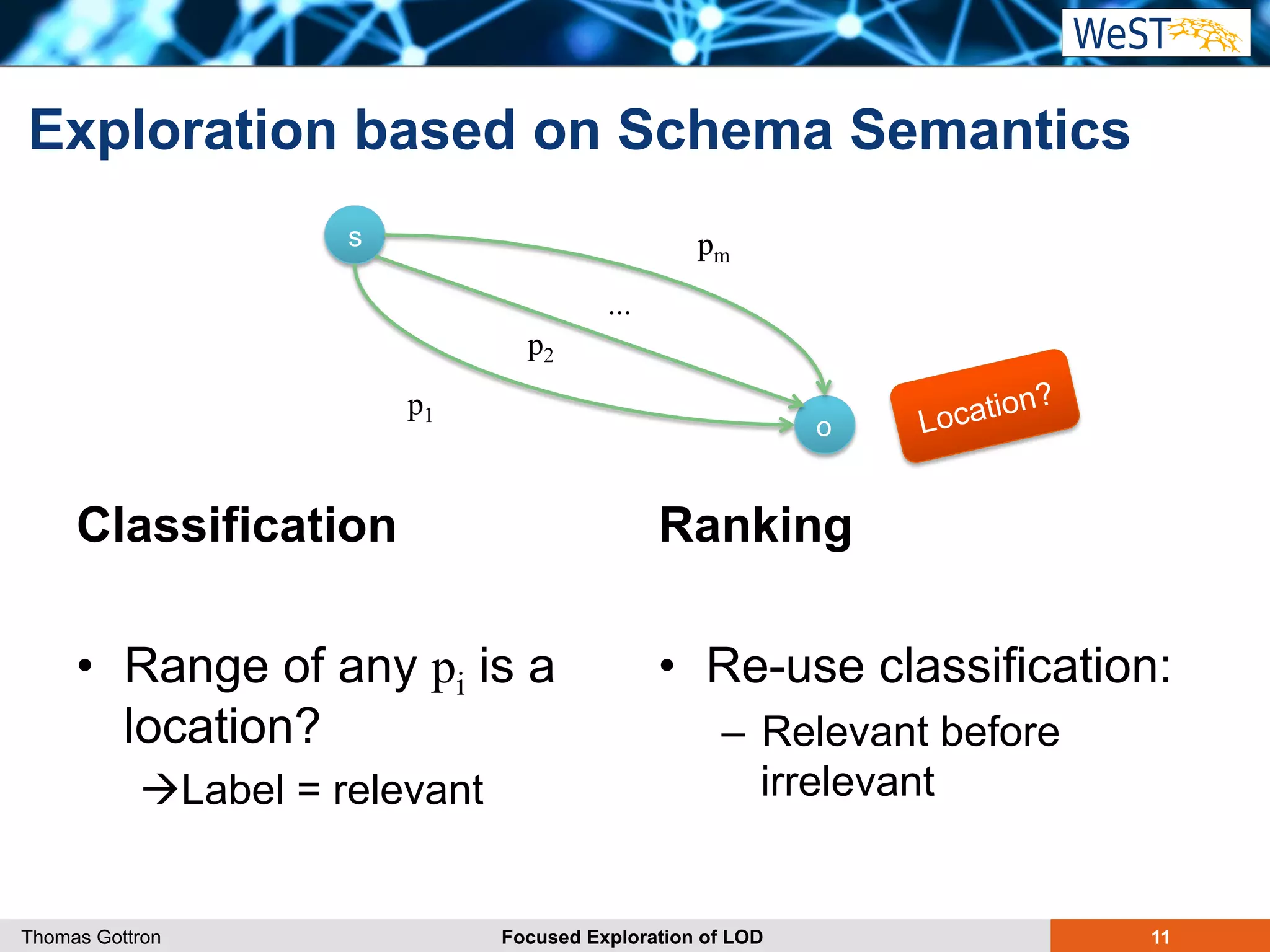
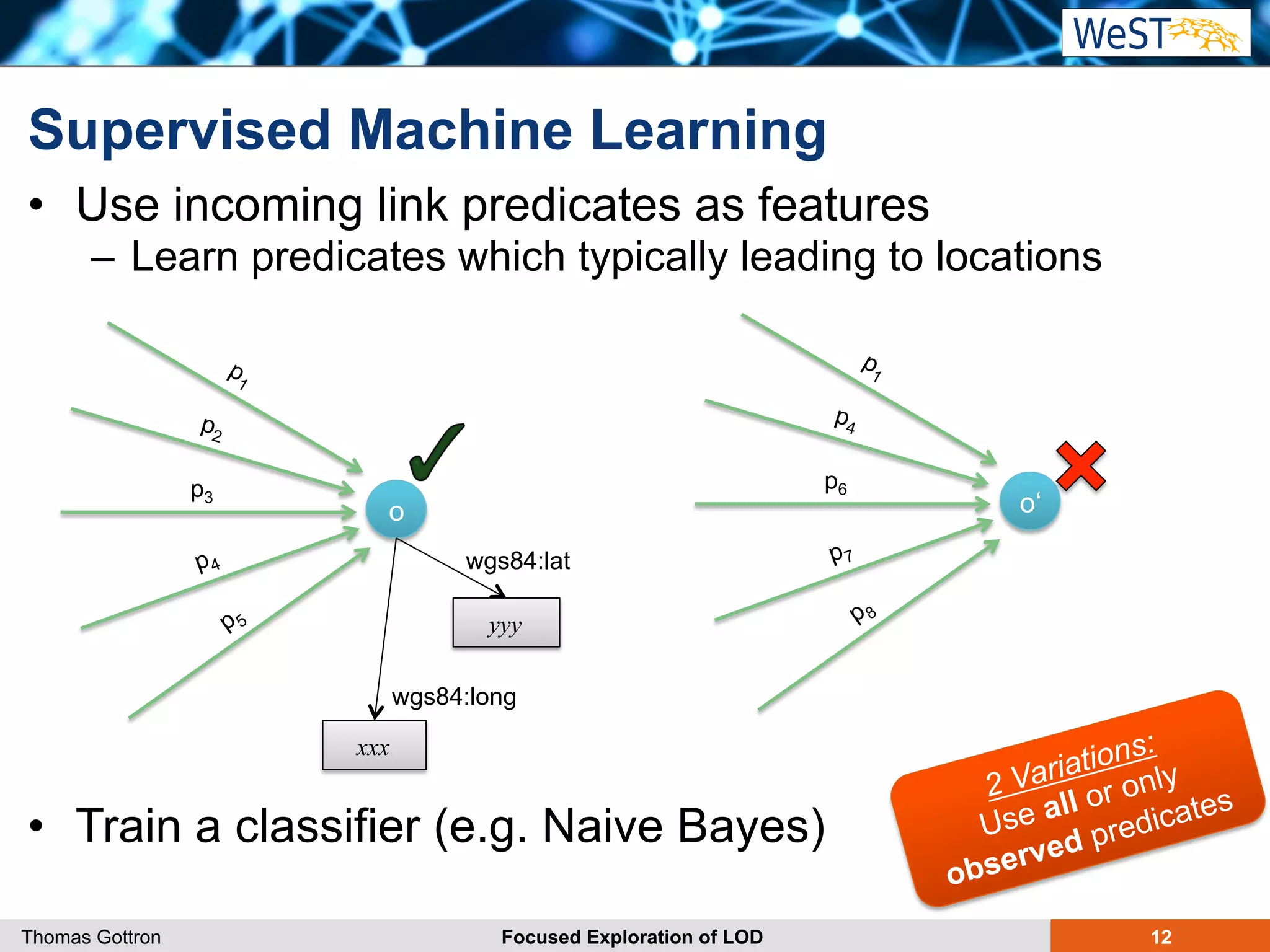

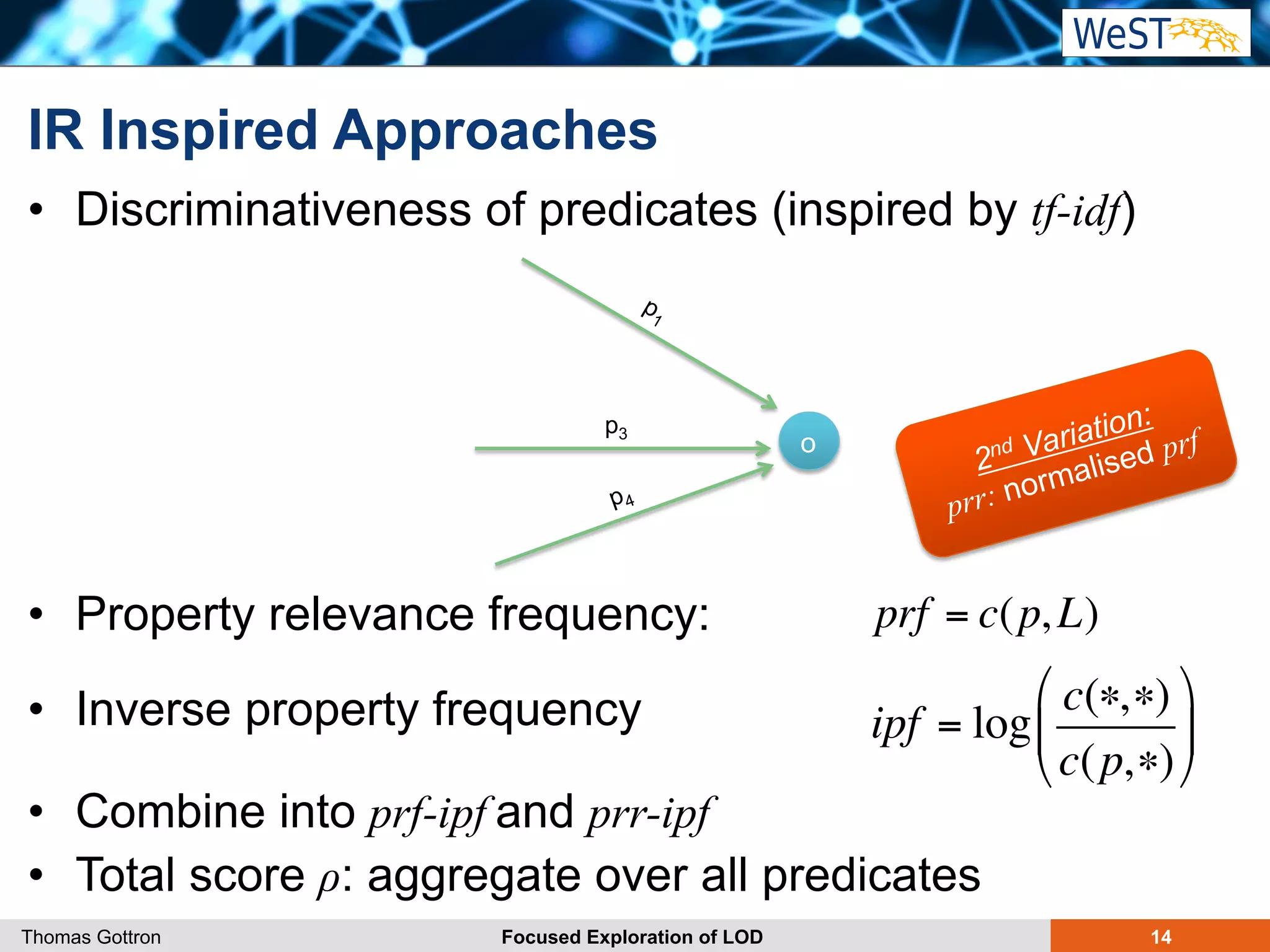
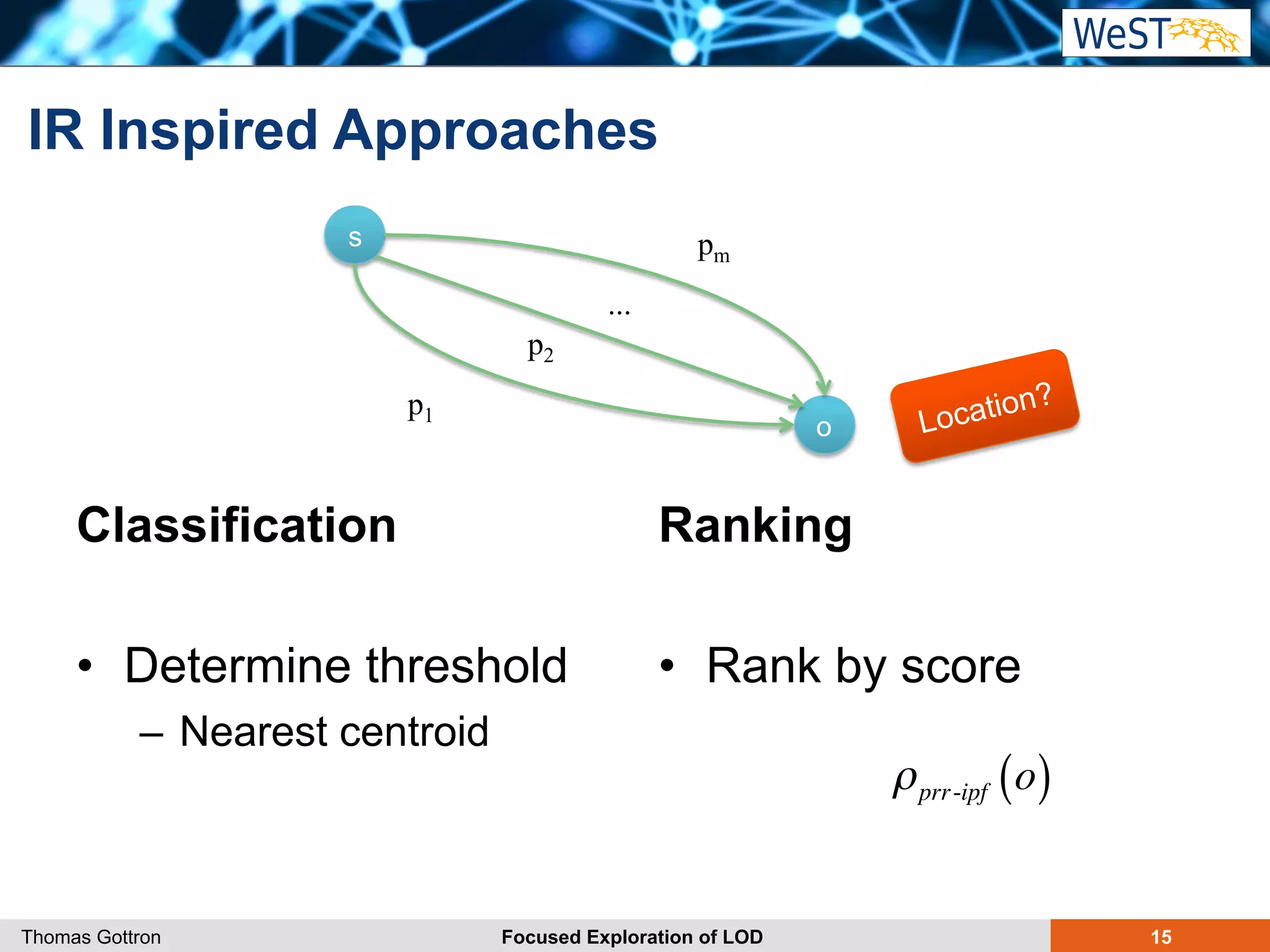
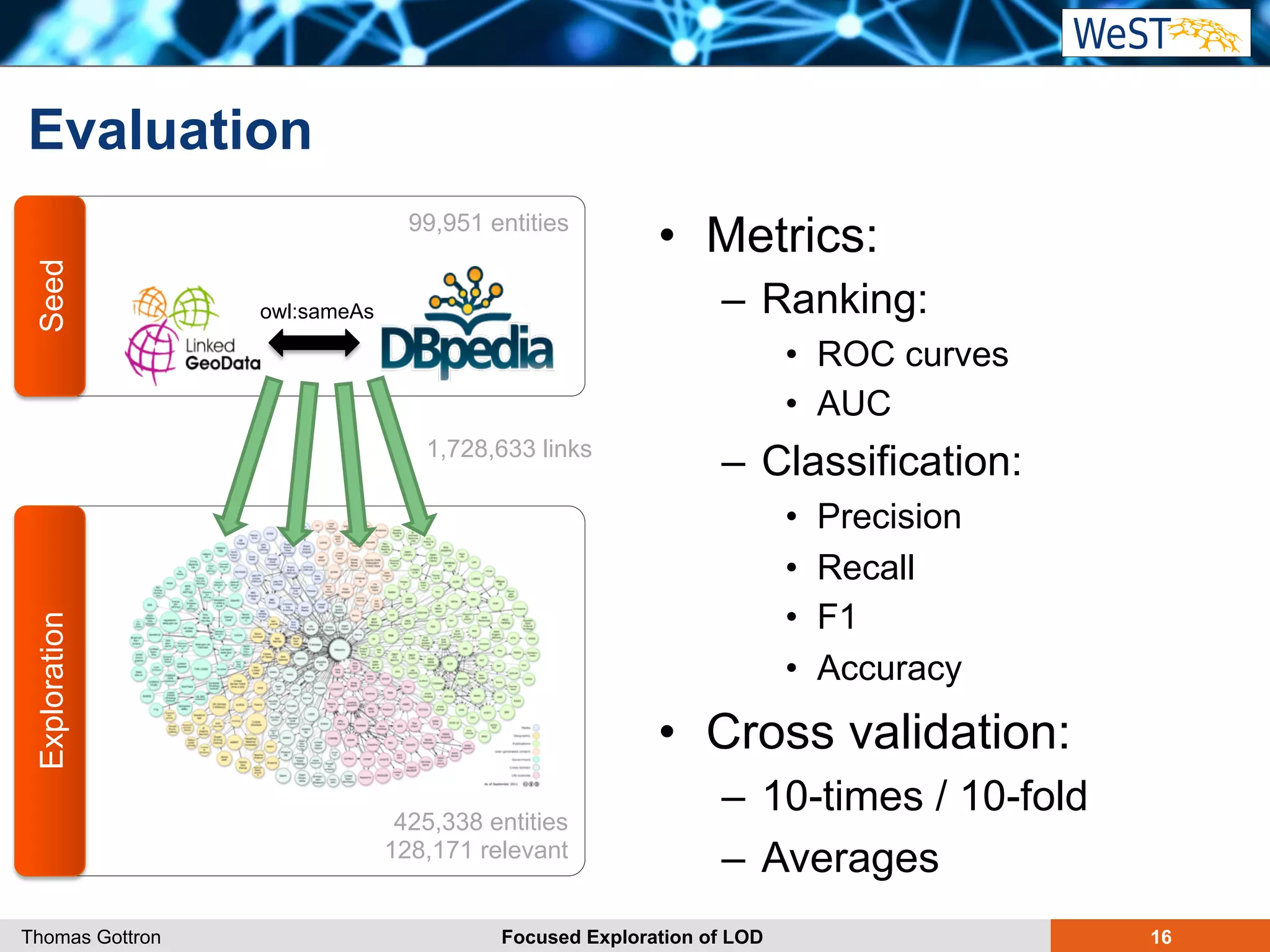
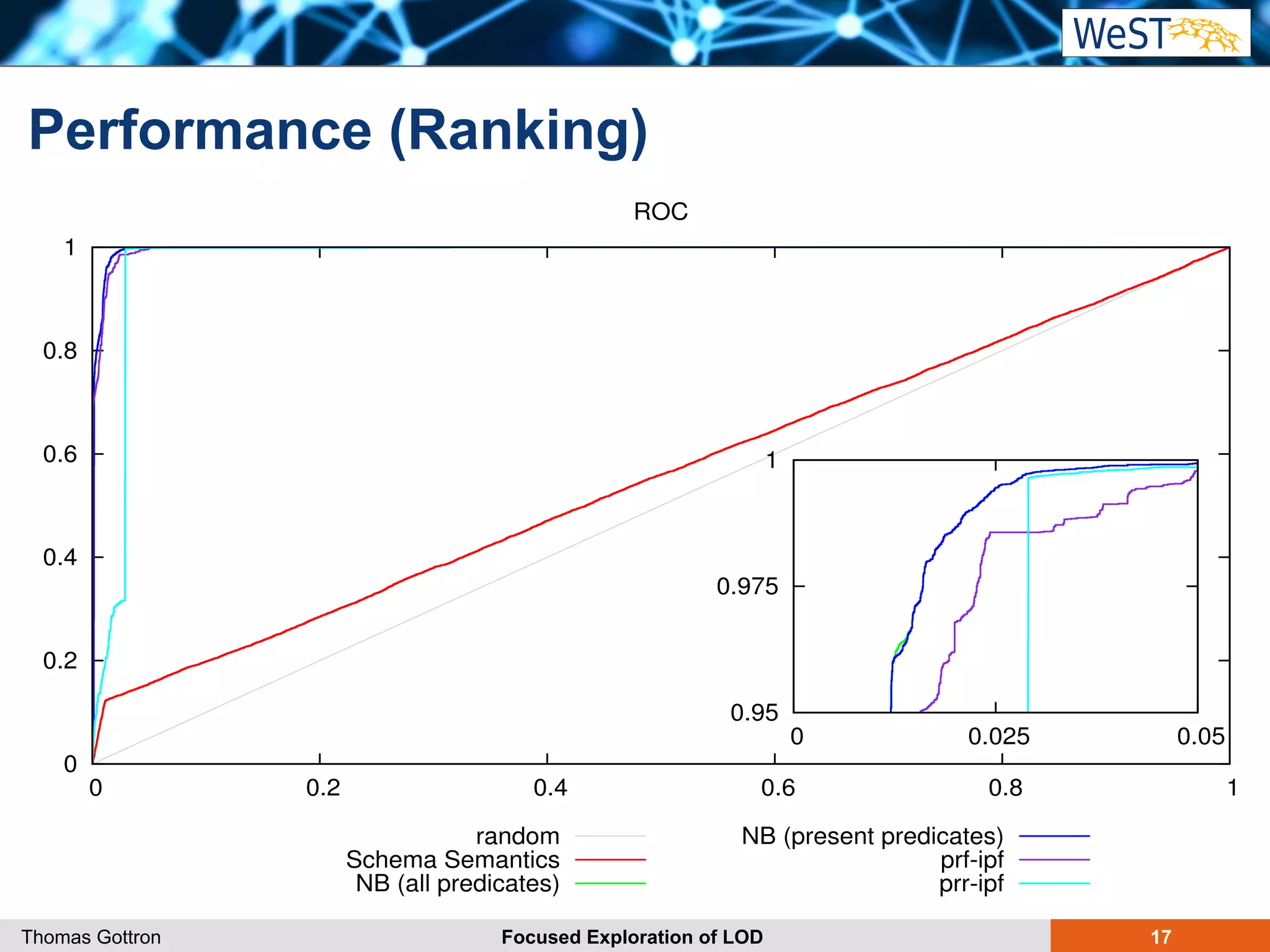
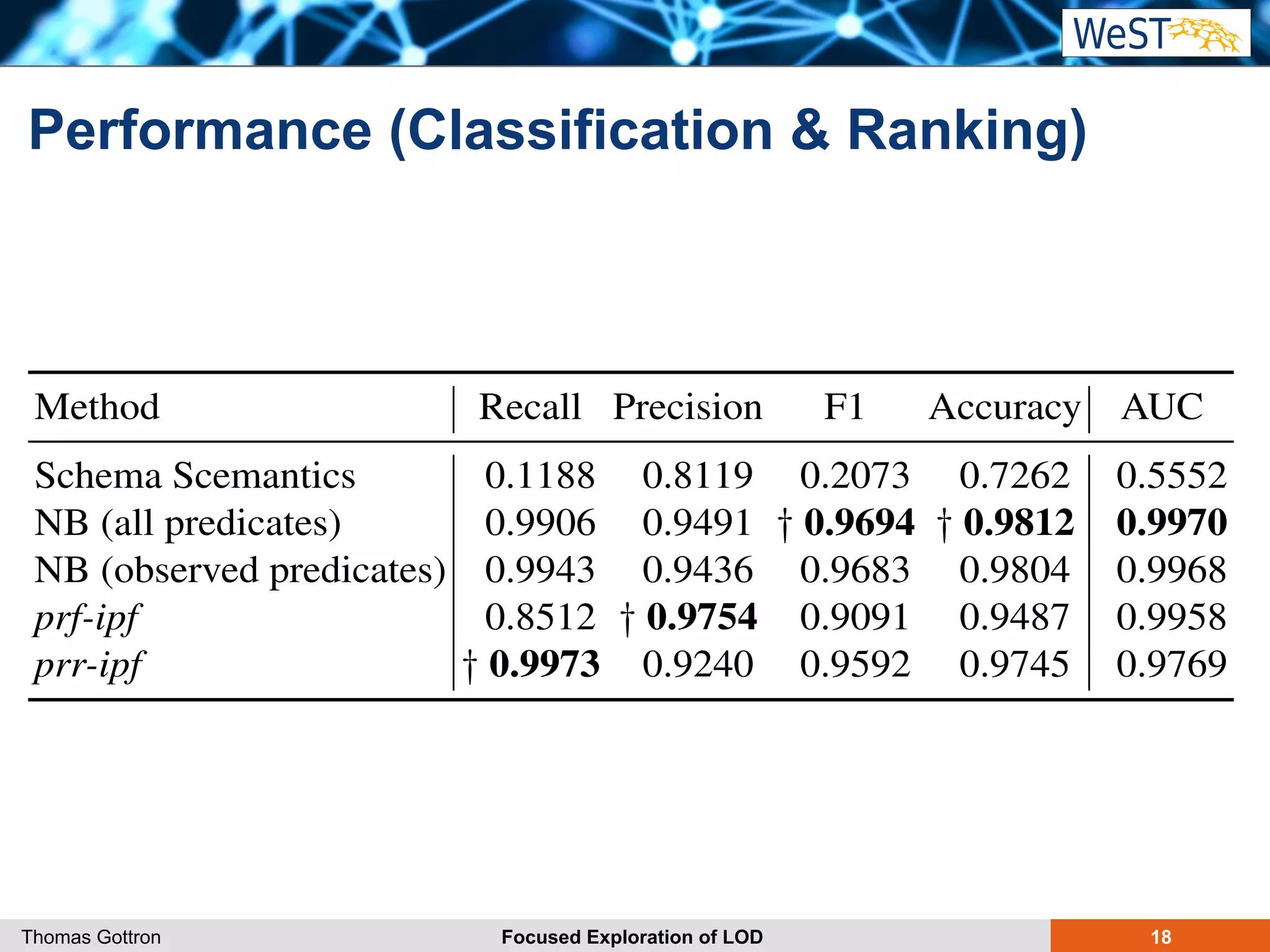


The document discusses focused exploration of linked open data (LOD), emphasizing challenges and methodologies for identifying relevant entities in a geospatial context. Various approaches, including schema semantics, supervised machine learning, and information retrieval inspired techniques, are evaluated for their effectiveness in classification and ranking of linked data. The results indicate that machine learning methods show the best performance, with suggestions for future work to generalize and improve the approaches.