Download to read offline

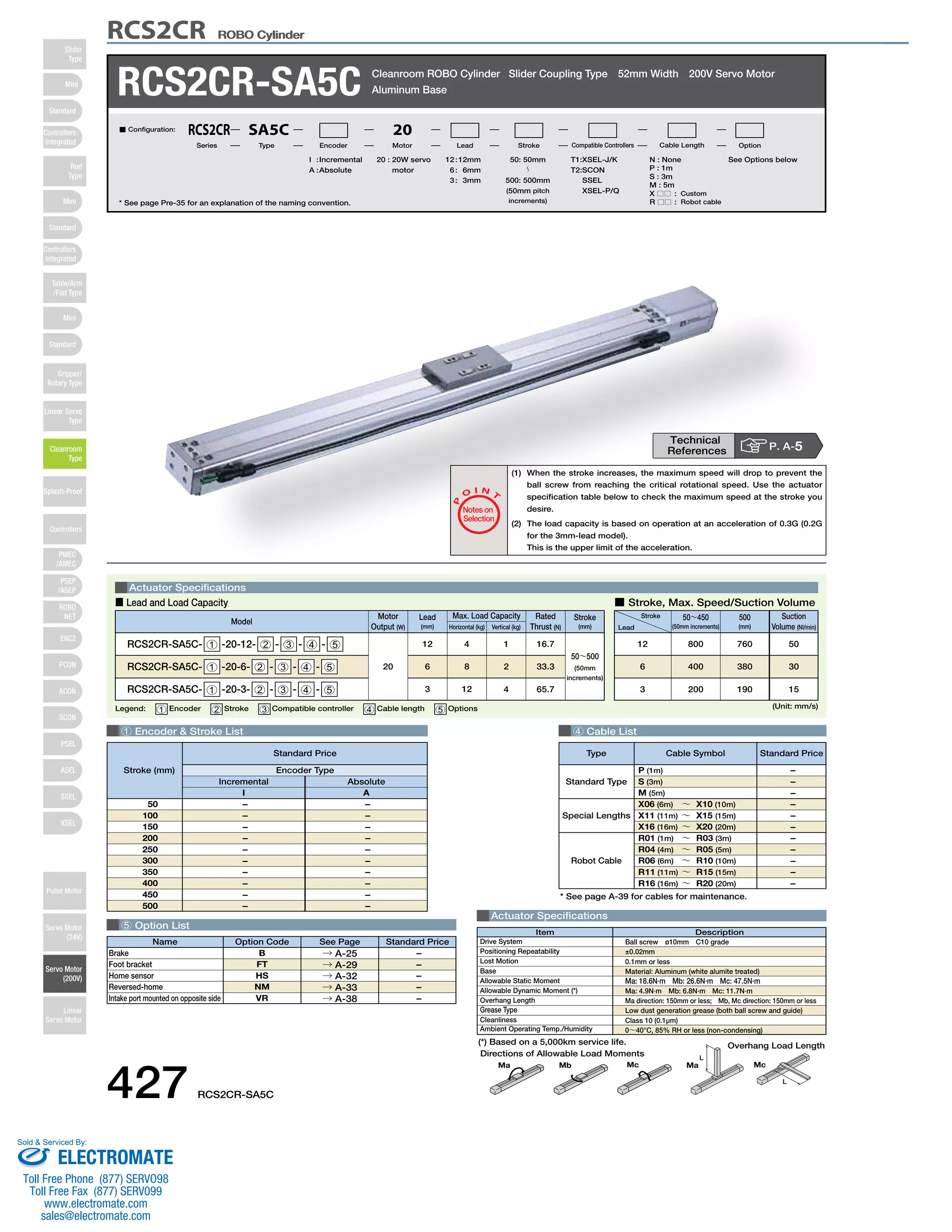
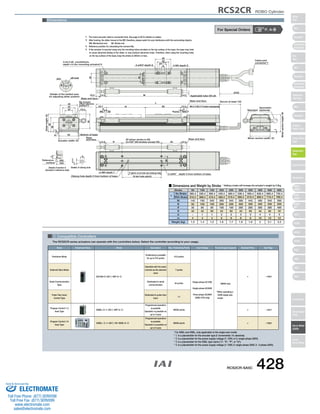

This document provides specifications for the RCS2CR-SA5C Cleanroom ROBO Cylinder Slider Coupling Type 52mm Width 200V Servo Motor. It includes details on stroke lengths, load capacities, dimensions, weights, compatible controllers, cable lengths and options. Technical references are provided on pages A-25 through A-38 relating to brakes, home sensors, intake port locations and more. Electromate is listed as the distributor to contact for sales and service.























































































