Downloaded 63 times

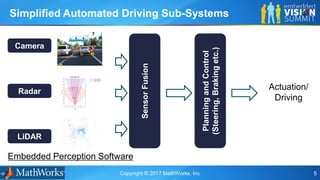
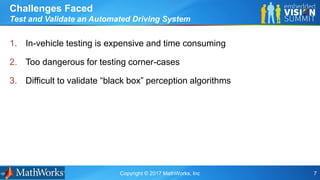
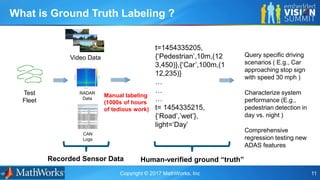
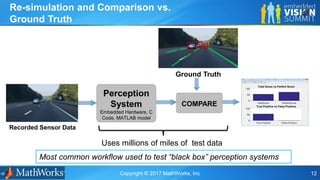





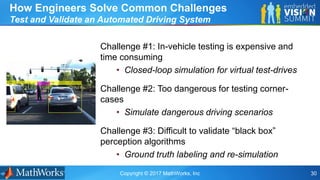
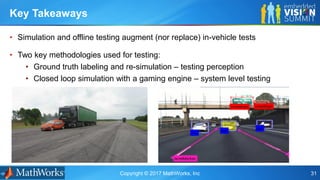

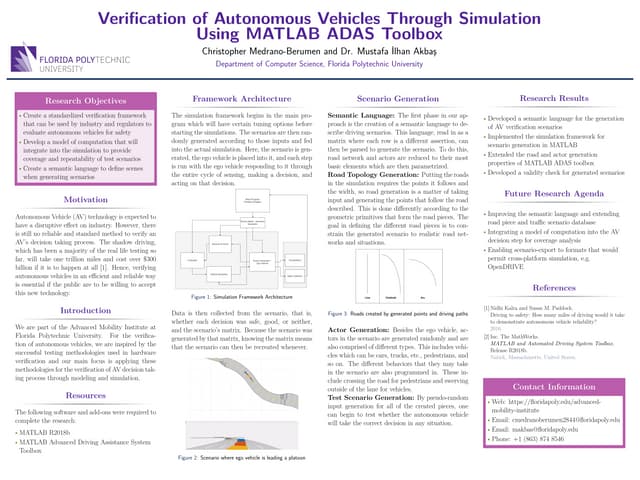
The document outlines the methodologies for testing and validating automated driving systems, emphasizing the importance of safety and integration of software and sensors. It highlights challenges in testing perception systems, the need for ground truth labeling, and the use of simulation to address dangerous scenarios. Key testing methods discussed include in-vehicle testing, open loop testing, and closed loop simulation with hardware-in-the-loop.