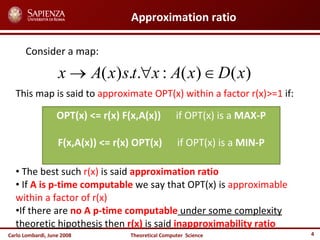
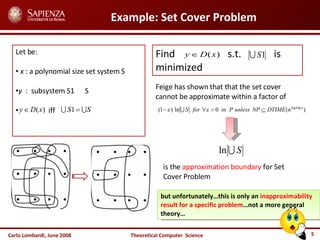
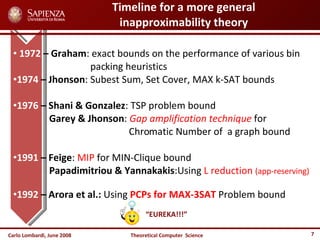
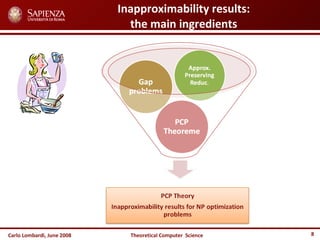
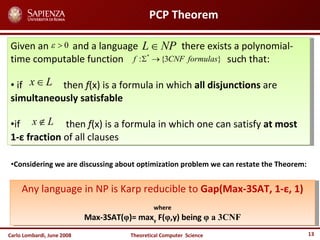
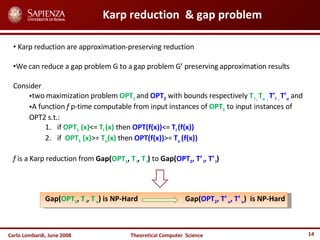
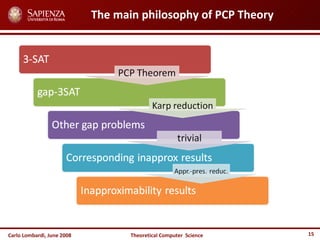
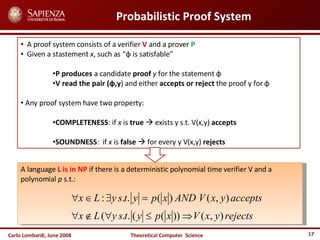
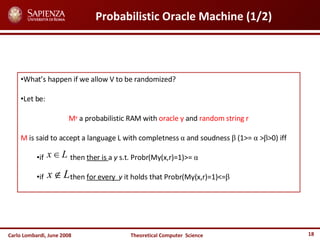
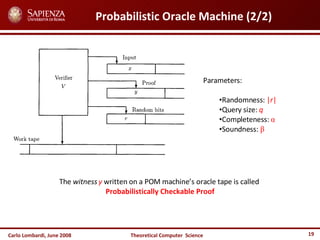
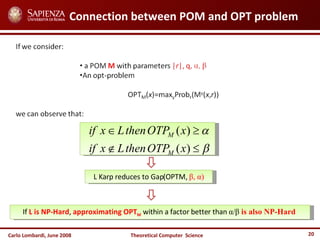
The document discusses inapproximability theory for NP optimization problems. It provides an overview of approximation ratios and approximation-preserving reductions. The key ingredients for obtaining inapproximability results are approximation-preserving reductions, gap problems, and the probabilistic checking proof (PCP) theorem. The PCP theorem shows that any language in NP can be reduced to approximating a gap problem for MAX-3SAT, allowing efficient computation of gap problems and derivation of inapproximability results.


































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)