Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Bizan Nishimura
2,244 views
GR-MANGOでEtherCAT
GR-MANGO作品発表会での発表資料です。
Technology
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 19
2
/ 19
3
/ 19
4
/ 19
5
/ 19
6
/ 19
7
/ 19
8
/ 19
9
/ 19
10
/ 19
11
/ 19
12
/ 19
13
/ 19
14
/ 19
15
/ 19
16
/ 19
17
/ 19
18
/ 19
19
/ 19
More Related Content
PDF
ChatGPTは思ったほど賢くない
by
Carnot Inc.
PDF
営業・運用を支える "気付ける" 管理画面
by
Masao Maeda
PDF
プログラムを高速化する話
by
京大 マイコンクラブ
PPTX
AVX-512(フォーマット)詳解
by
MITSUNARI Shigeo
PDF
Nuitrackを用いて自作ヒューマノイドを動かしてみた話
by
Hirokazu Onomichi
PDF
BLS Based Discreet Log Contracts
by
Ichiro Kuwahara
PDF
PHPからgoへの移行で分かったこと
by
gree_tech
PDF
【de:code 2020】 Power Virtual Agents : ノーコードでボットを作ろう
by
日本マイクロソフト株式会社
ChatGPTは思ったほど賢くない
by
Carnot Inc.
営業・運用を支える "気付ける" 管理画面
by
Masao Maeda
プログラムを高速化する話
by
京大 マイコンクラブ
AVX-512(フォーマット)詳解
by
MITSUNARI Shigeo
Nuitrackを用いて自作ヒューマノイドを動かしてみた話
by
Hirokazu Onomichi
BLS Based Discreet Log Contracts
by
Ichiro Kuwahara
PHPからgoへの移行で分かったこと
by
gree_tech
【de:code 2020】 Power Virtual Agents : ノーコードでボットを作ろう
by
日本マイクロソフト株式会社
What's hot
PDF
Rustに触れて私のPythonはどう変わったか
by
ShunsukeNakamura17
PDF
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
PDF
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
PPTX
IoTデバイスデータ収集の難しい点
by
Tetsutaro Watanabe
PDF
Golangで並行シミュレーテッドアニーリング
by
tsuji daishiro
PDF
Node-REDのworldmapの活用
by
OSgeo Japan
PPTX
【Photon勉強会】1時間でわかるプラグイン開発とその実際(2017/3/23講演)
by
Photon運営事務局
PPTX
失敗から学ぶ データ分析グループの チームマネジメント変遷 (デブサミ2016) #devsumi
by
Tokoroten Nakayama
ODP
音声認識の基礎
by
Akinori Ito
PDF
一階述語論理のメモ
by
Keisuke OTAKI
PDF
二部グラフの最小点被覆と最大安定集合と最小辺被覆の求め方
by
Kensuke Otsuki
PDF
JTubeSpeech: 音声認識と話者照合のために YouTube から構築される日本語音声コーパス
by
Shinnosuke Takamichi
PDF
様々な全域木問題
by
tmaehara
PDF
人工知能をめぐる 意識と環境と身体の理論(下)
by
Youichiro Miyake
PDF
PCL
by
Masafumi Noda
PPTX
Verilator勉強会 2021/05/29
by
ryuz88
PDF
GoによるiOSアプリの開発
by
Takuya Ueda
PDF
ネットワークコンフィグ分析ツール Batfish との付き合い方
by
akira6592
PDF
ドコモオープンイノベーションの取り組みと提供APIのIoT展開について
by
API Meetup
PDF
tf,tf2完全理解
by
Koji Terada
Rustに触れて私のPythonはどう変わったか
by
ShunsukeNakamura17
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
IoTデバイスデータ収集の難しい点
by
Tetsutaro Watanabe
Golangで並行シミュレーテッドアニーリング
by
tsuji daishiro
Node-REDのworldmapの活用
by
OSgeo Japan
【Photon勉強会】1時間でわかるプラグイン開発とその実際(2017/3/23講演)
by
Photon運営事務局
失敗から学ぶ データ分析グループの チームマネジメント変遷 (デブサミ2016) #devsumi
by
Tokoroten Nakayama
音声認識の基礎
by
Akinori Ito
一階述語論理のメモ
by
Keisuke OTAKI
二部グラフの最小点被覆と最大安定集合と最小辺被覆の求め方
by
Kensuke Otsuki
JTubeSpeech: 音声認識と話者照合のために YouTube から構築される日本語音声コーパス
by
Shinnosuke Takamichi
様々な全域木問題
by
tmaehara
人工知能をめぐる 意識と環境と身体の理論(下)
by
Youichiro Miyake
PCL
by
Masafumi Noda
Verilator勉強会 2021/05/29
by
ryuz88
GoによるiOSアプリの開発
by
Takuya Ueda
ネットワークコンフィグ分析ツール Batfish との付き合い方
by
akira6592
ドコモオープンイノベーションの取り組みと提供APIのIoT展開について
by
API Meetup
tf,tf2完全理解
by
Koji Terada
More from Bizan Nishimura
PDF
光る縄文土器を作る
by
Bizan Nishimura
PDF
IoT渾天儀で太陽の運行を知る
by
Bizan Nishimura
PDF
ALGYAN 6th IoT基板で倒立振子
by
Bizan Nishimura
PDF
TeXで多言語文書作成! (2011年ごろの資料)
by
Bizan Nishimura
PDF
GR-SAKURAでEtherCAT
by
Bizan Nishimura
PDF
だんグラ用お玉コントローラ
by
Bizan Nishimura
PDF
可視光を利用したIoTエッジデバイスとの通信
by
Bizan Nishimura
PDF
IoTマニ車でクラウドに功徳を積む
by
Bizan Nishimura
PDF
Arduino系IDE設定切替ツール inoSwitch
by
Bizan Nishimura
PDF
二足歩行ロボットKXR-L2をGR-ROSEで動かす
by
Bizan Nishimura
PDF
ラジコンで演奏する楽器
by
Bizan Nishimura
PDF
CANとCANopen
by
Bizan Nishimura
PDF
GRでシリアルサーボ
by
Bizan Nishimura
PDF
Esp8266でラジコン基板
by
Bizan Nishimura
PDF
BLEラジコン基板でIoTしてみた
by
Bizan Nishimura
PDF
ミニ四足 ~歩くミニ四駆~
by
Bizan Nishimura
PDF
SerialScreen
by
Bizan Nishimura
PDF
mrubyでC使う? Cでmruby使う?
by
Bizan Nishimura
PDF
GR-KURUMIでミニ四駆をラジコン化
by
Bizan Nishimura
PDF
GR-KURUMIで倒立振子
by
Bizan Nishimura
光る縄文土器を作る
by
Bizan Nishimura
IoT渾天儀で太陽の運行を知る
by
Bizan Nishimura
ALGYAN 6th IoT基板で倒立振子
by
Bizan Nishimura
TeXで多言語文書作成! (2011年ごろの資料)
by
Bizan Nishimura
GR-SAKURAでEtherCAT
by
Bizan Nishimura
だんグラ用お玉コントローラ
by
Bizan Nishimura
可視光を利用したIoTエッジデバイスとの通信
by
Bizan Nishimura
IoTマニ車でクラウドに功徳を積む
by
Bizan Nishimura
Arduino系IDE設定切替ツール inoSwitch
by
Bizan Nishimura
二足歩行ロボットKXR-L2をGR-ROSEで動かす
by
Bizan Nishimura
ラジコンで演奏する楽器
by
Bizan Nishimura
CANとCANopen
by
Bizan Nishimura
GRでシリアルサーボ
by
Bizan Nishimura
Esp8266でラジコン基板
by
Bizan Nishimura
BLEラジコン基板でIoTしてみた
by
Bizan Nishimura
ミニ四足 ~歩くミニ四駆~
by
Bizan Nishimura
SerialScreen
by
Bizan Nishimura
mrubyでC使う? Cでmruby使う?
by
Bizan Nishimura
GR-KURUMIでミニ四駆をラジコン化
by
Bizan Nishimura
GR-KURUMIで倒立振子
by
Bizan Nishimura
GR-MANGOでEtherCAT
1.
GR-MANGOでEtherCAT 2020.8.29 GR-MANGO作品発表会 西村備山 (@lipoyang)
2.
自己紹介 奈良県在住 組込み系技術者 西村備山 (@lipoyang)
3.
EtherCATとは? ベッコフ社Webサイトより いいさキャット?
4.
EtherCATとは? • Ethernetベースのフィールドバス (FA機器をLANケーブルで接続) • リアルタイム性が非常に高い (低レイテンシ、低ジッタ)
5.
GR-SAKURAで作ってみた (2019年 ルネサスナイト15)
6.
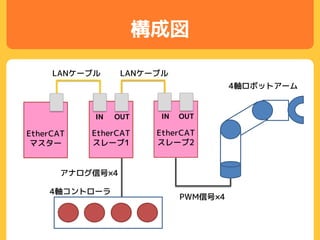
構成図 EtherCAT マスター EtherCAT スレーブ1 LANケーブル LANケーブル IN OUT EtherCAT スレーブ2 IN
OUT PWM信号×4 4軸ロボットアーム アナログ信号×4 4軸コントローラ
7.
マスターとスレーブ EtherCATマスター EtherCATスレーブ GR-SAKURAの LANポートを使用 スレーブには 専用H/Wが必要
8.
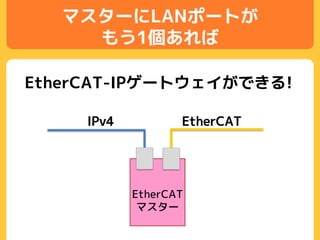
マスターにLANポートが もう1個あれば EtherCAT マスター EtherCATIPv4 EtherCAT-IPゲートウェイができる!
9.
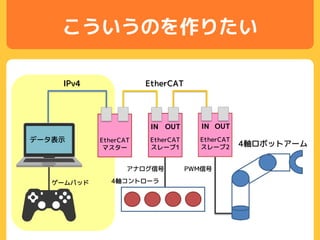
こういうのを作りたい PWM信号 4軸ロボットアーム EtherCAT マスター EtherCAT スレーブ1 EtherCAT IN OUT EtherCAT スレーブ2 IN OUT アナログ信号 4軸コントローラ IPv4 ゲームパッド データ表示
10.
【朗報】 LANポート2個搭載 GR-MANGO 登場!
11.
【悲報】 「LANポート2個はニーズが少ない」 「LANポート2個をサポートする自信が無い」 「Mbedで使えるのはLANポート1個だけ」 「製品版ではLANポート1個になるかも」
12.
【悲報】 「Mbed の Ethernetクラスは未実装」 •
Ethernetクラス … 生のEthernetフレームをハンドルする EtherCATマスターに使うならこちら • EthernetInterfaceクラス … IPパケットをハンドルする たいていはこちらを使う
13.
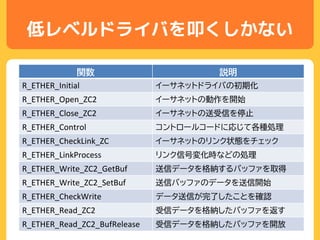
低レベルドライバを叩くしかない 関数 説明 R_ETHER_Initial イーサネットドライバの初期化 R_ETHER_Open_ZC2
イーサネットの動作を開始 R_ETHER_Close_ZC2 イーサネットの送受信を停止 R_ETHER_Control コントロールコードに応じて各種処理 R_ETHER_CheckLink_ZC イーサネットのリンク状態をチェック R_ETHER_LinkProcess リンク信号変化時などの処理 R_ETHER_Write_ZC2_GetBuf 送信データを格納するバッファを取得 R_ETHER_Write_ZC2_SetBuf 送信バッファのデータを送信開始 R_ETHER_CheckWrite データ送信が完了したことを確認 R_ETHER_Read_ZC2 受信データを格納したバッファを返す R_ETHER_Read_ZC2_BufRelease 受信データを格納したバッファを開放
14.
EtherCATマスター SOEM • Simple
Open EtherCAT Master • オープンソースのEtherCATマスター • Windows/Mac/Linuxに対応 • いくつかのRTOSにも対応 OpenEtherCATsociety/SOEM
15.
SOEM for Arduino
/ Mbed lipoyang/SOEM4Arduino lipoyang/SOEM4Mbed 対応ボード (2020/08/29 現在) Arduino系 Adruino Due, ESP32-DevKitC M5 Stack, ATOM Matrix chipKIT Max32 GR-SAKURA, GR-ROSE Mbed系 mbed LPC1768 NUCLEO-F767ZI, F446RE GR-PEACH, GR-MANGO
16.
ロボットアーム制御のデモ GR-MANGO(β版)でEtherCAT-IPゲートウェイ youtu.be/0t5lHCy8NLg
17.
ロボットアーム制御のデモ lipoyang/Mango_EtherCAT_IP GR-MANGO(β版)でEtherCAT-IPゲートウェイ CH0:UDP/IPに使用 CH1:EtherCATに使用 ソースコードと解説を公開中
18.
でも製品版では… LANポート1個なんですよね… (´・ω・`) ショボーン
19.
またね~ Twitter: @lipoyang GitHub: lipoyang SlideShare:
lipoyang http://lipoyang.net
Download