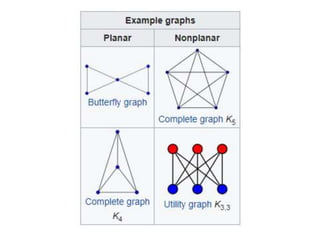
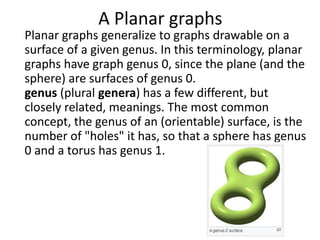
The document defines planar graphs, which can be drawn on a plane without edges crossing, and discusses their properties, including genus and planarity criteria. It covers Kuratowski's and Wagner's theorems that characterize planar graphs based on forbidden subgraphs and minors, respectively. Additionally, it presents planarity testing algorithms and inequalities related to edges, vertices, and faces in planar graphs.