Downloaded 35 times
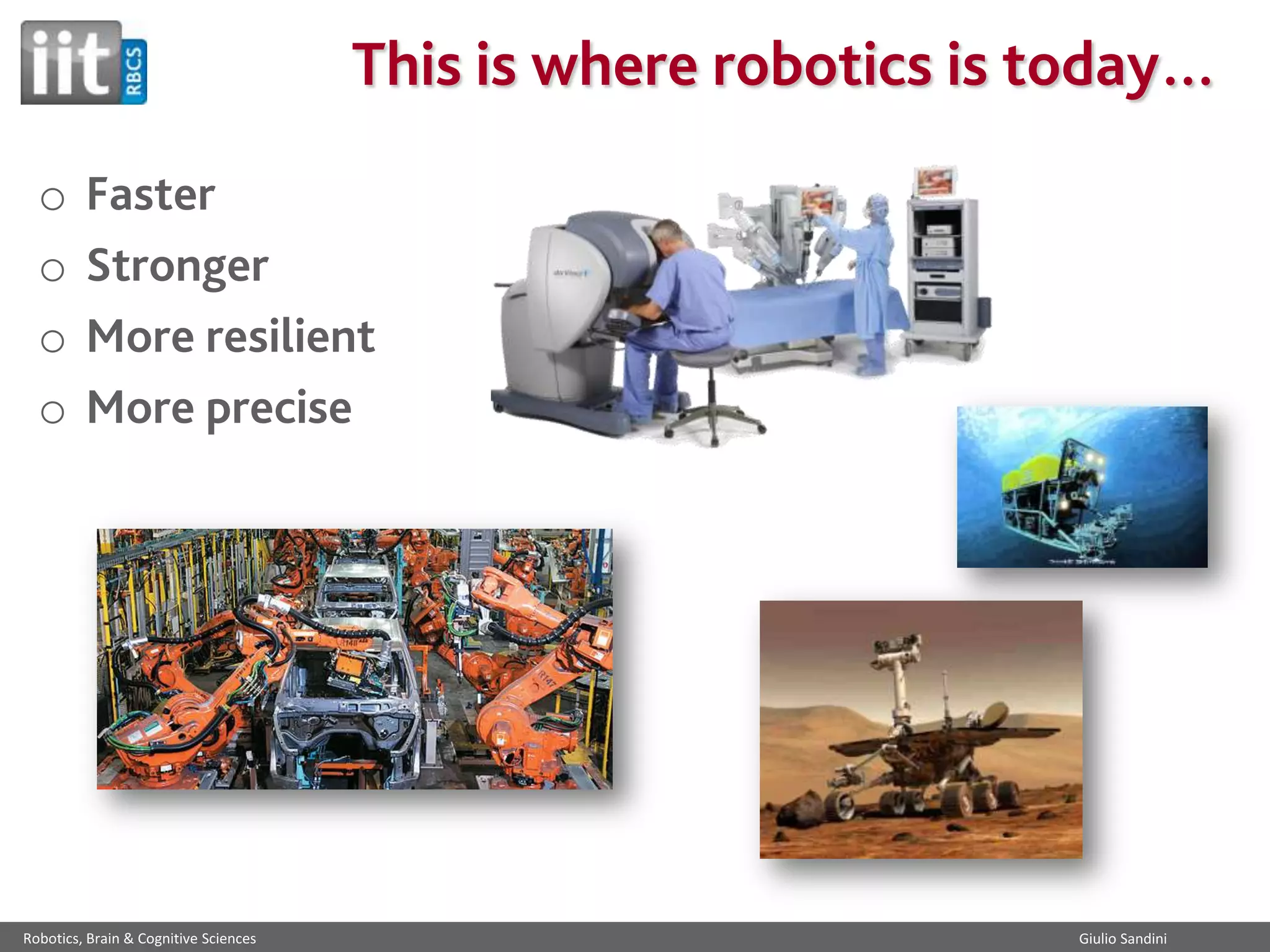
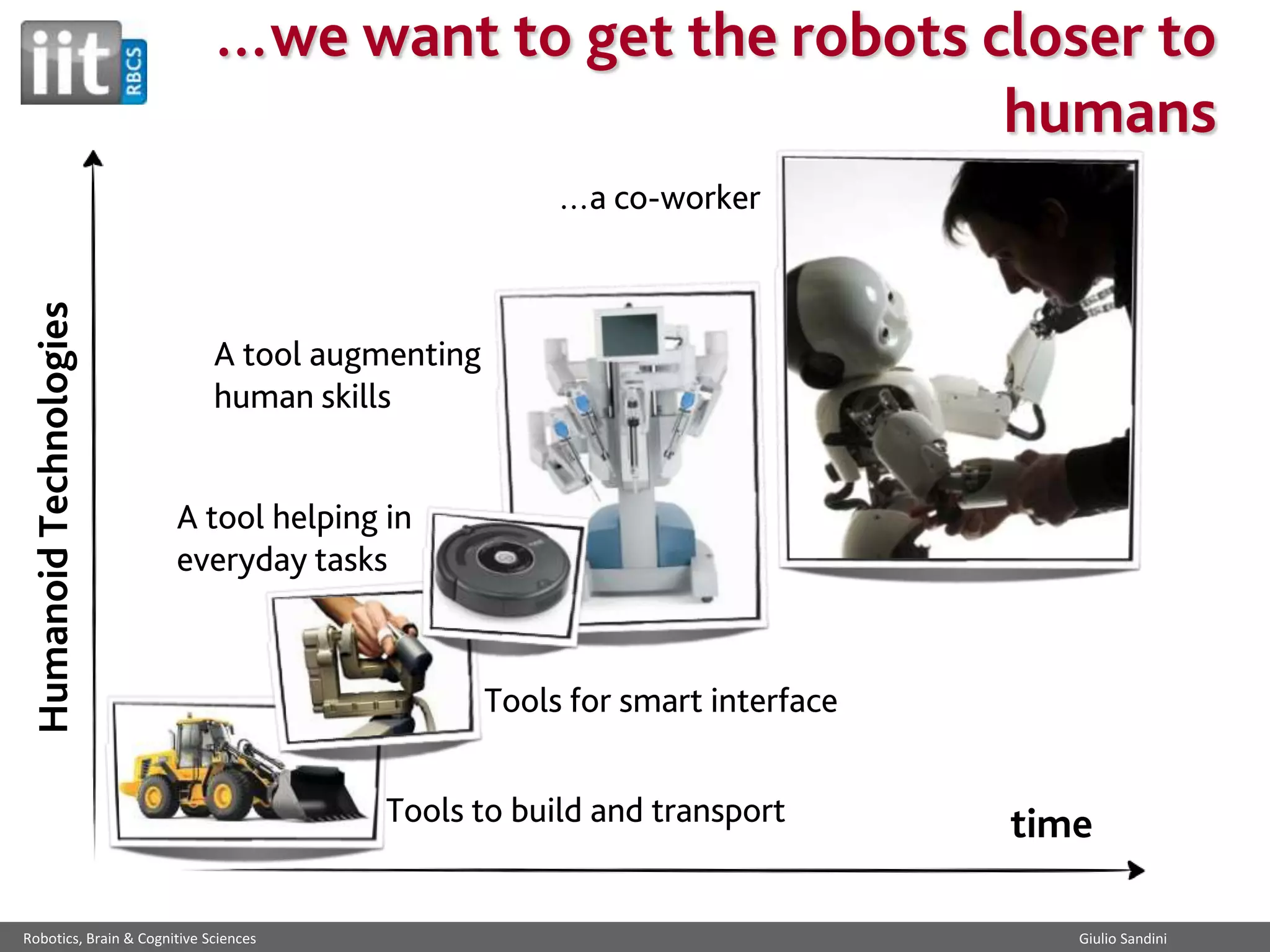
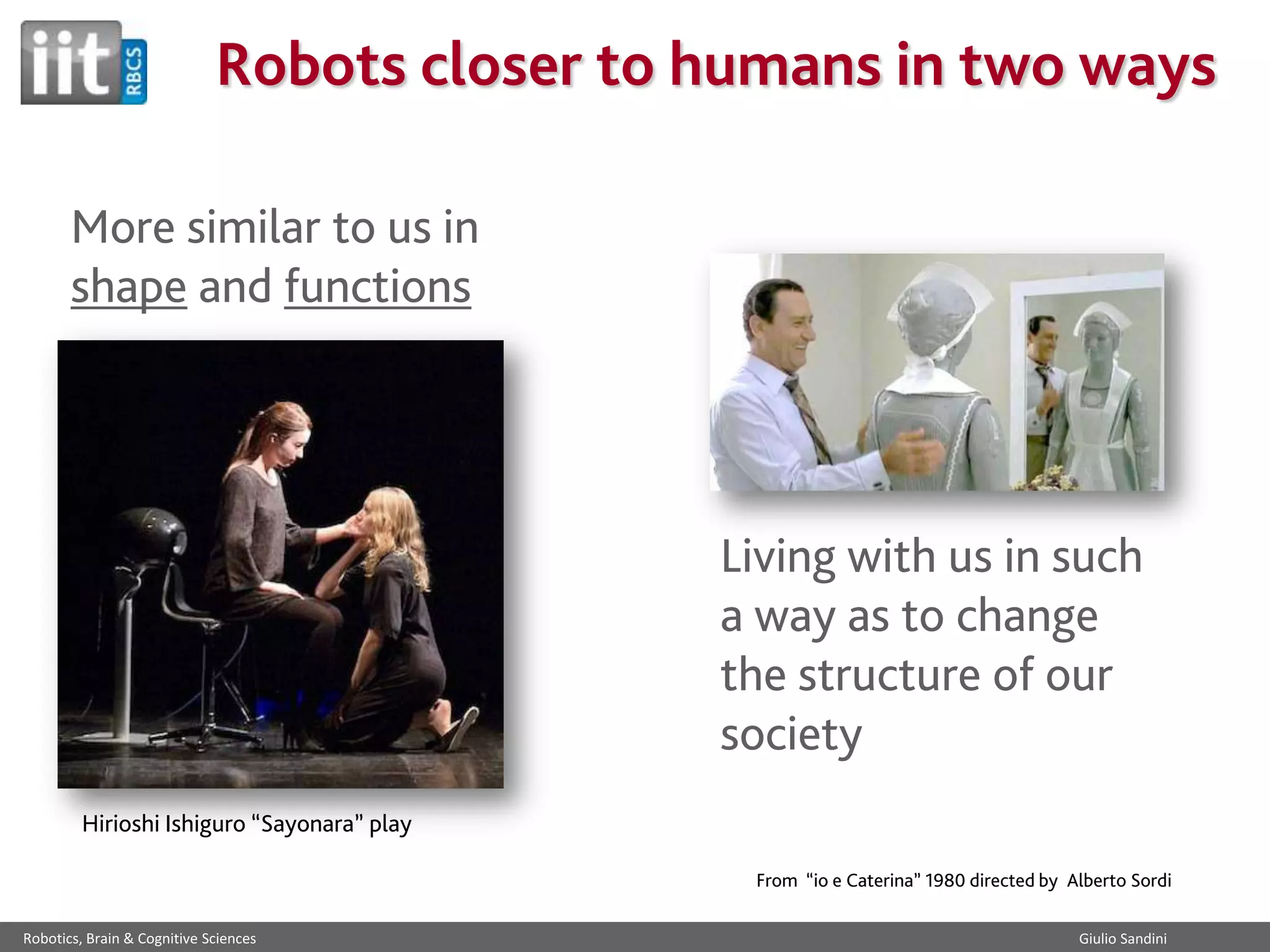

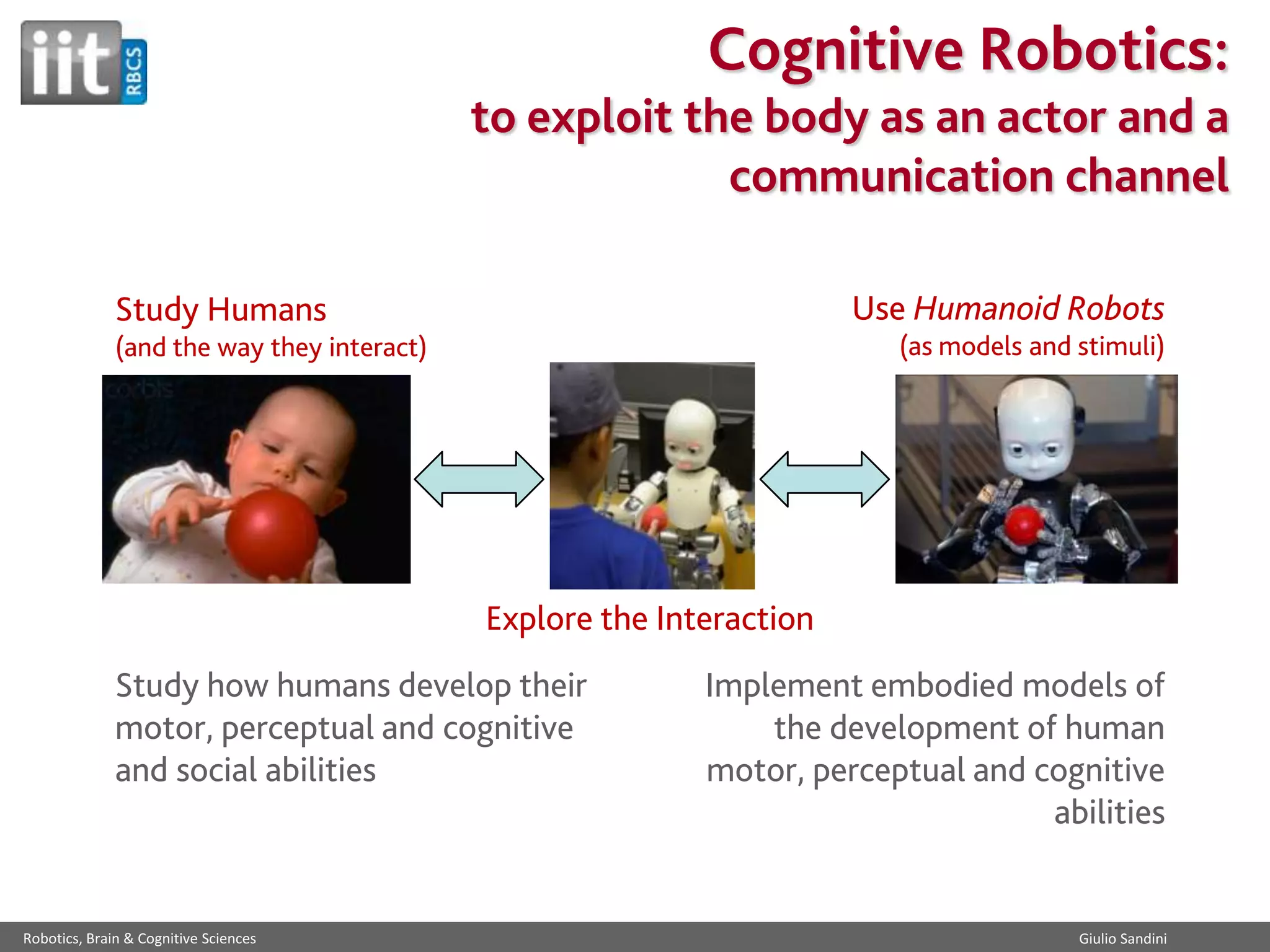
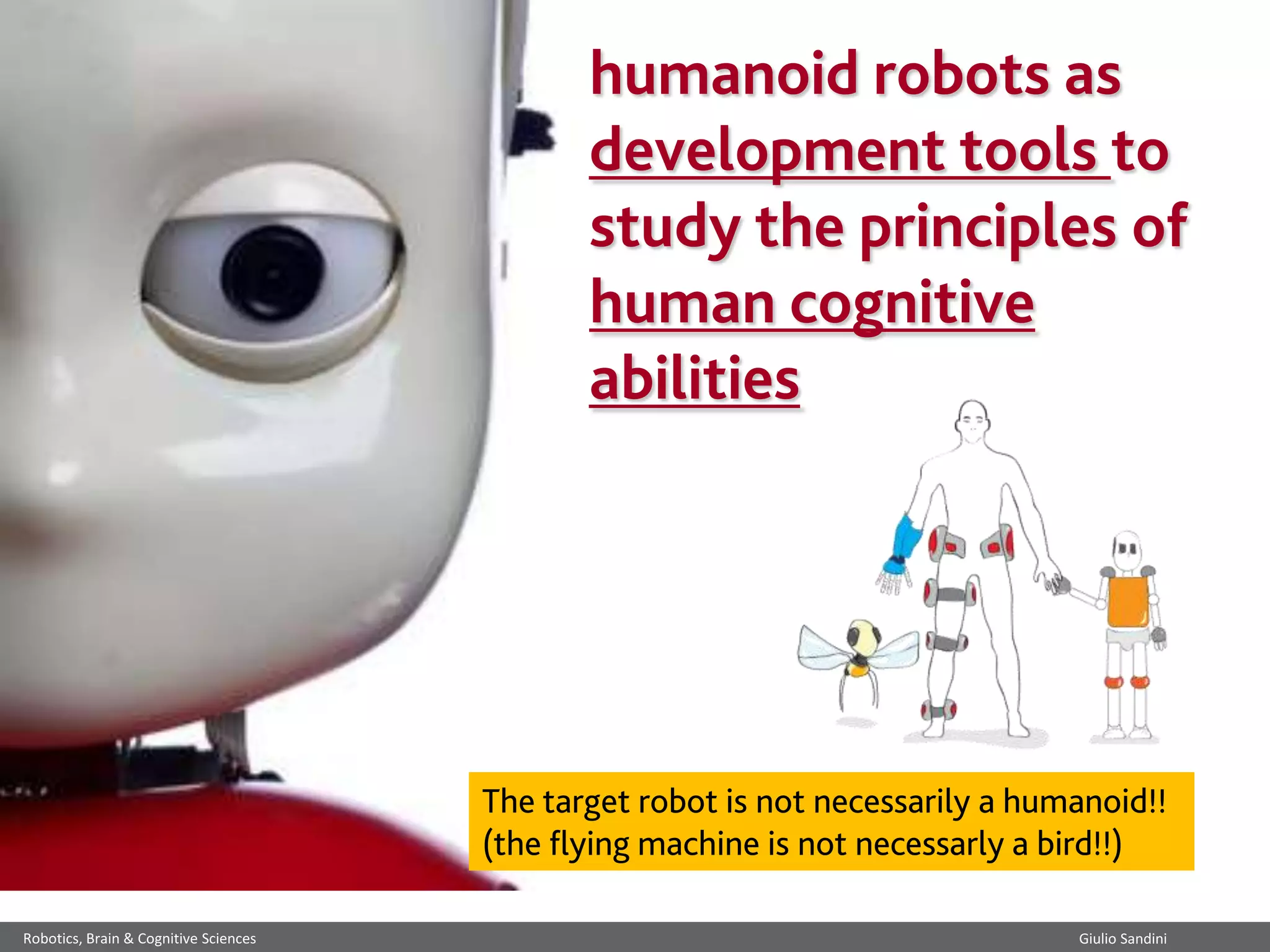
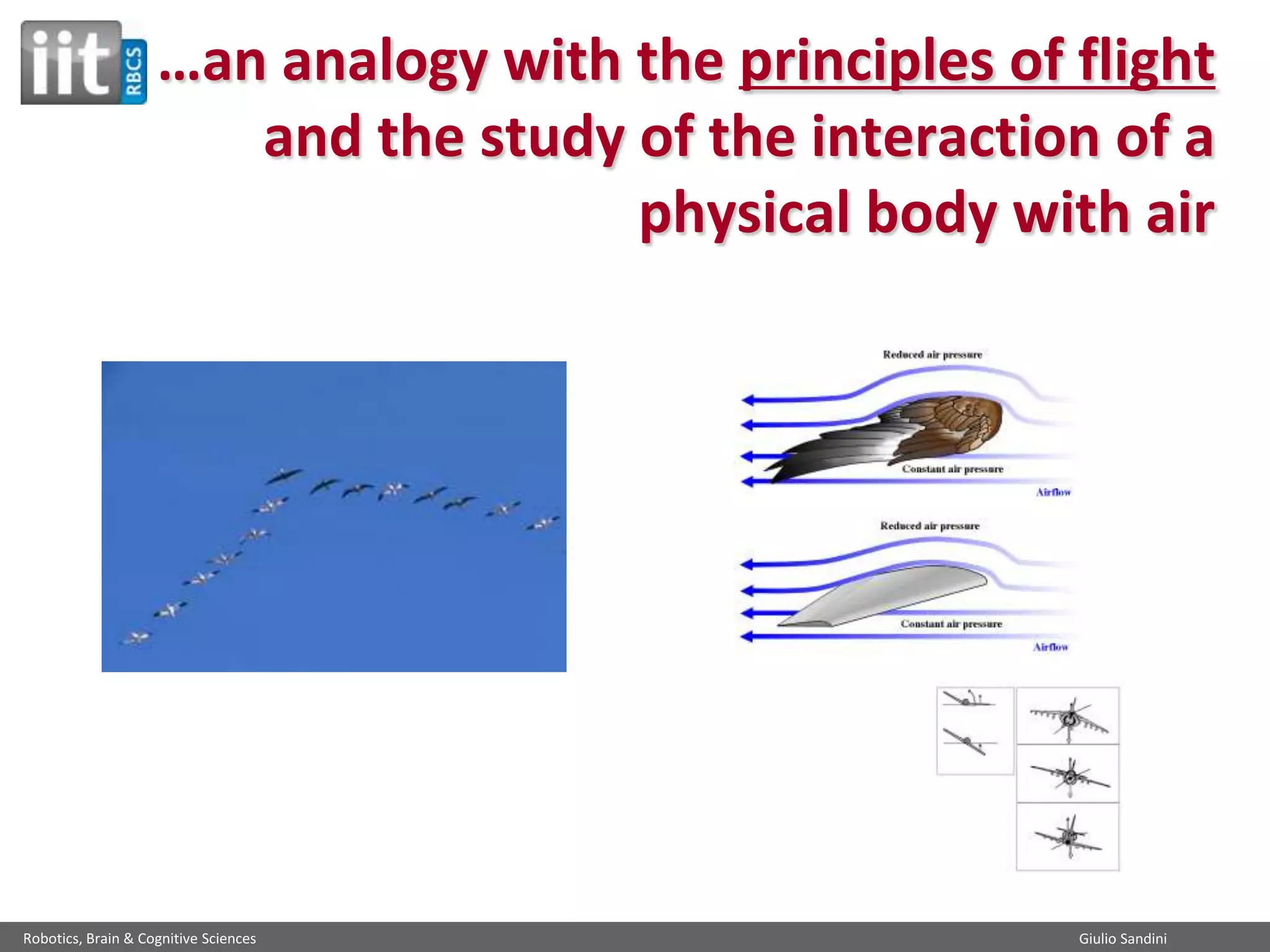
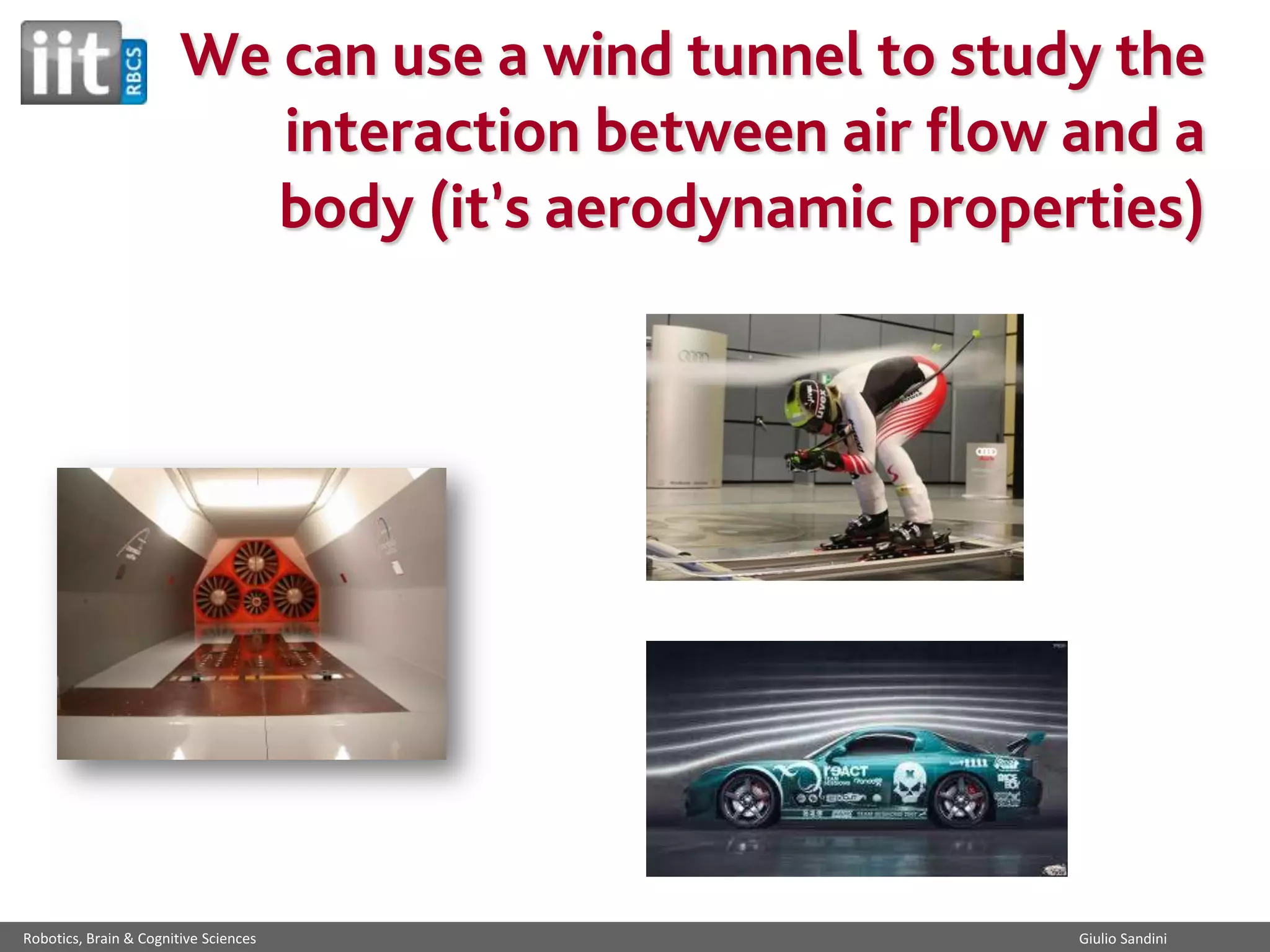
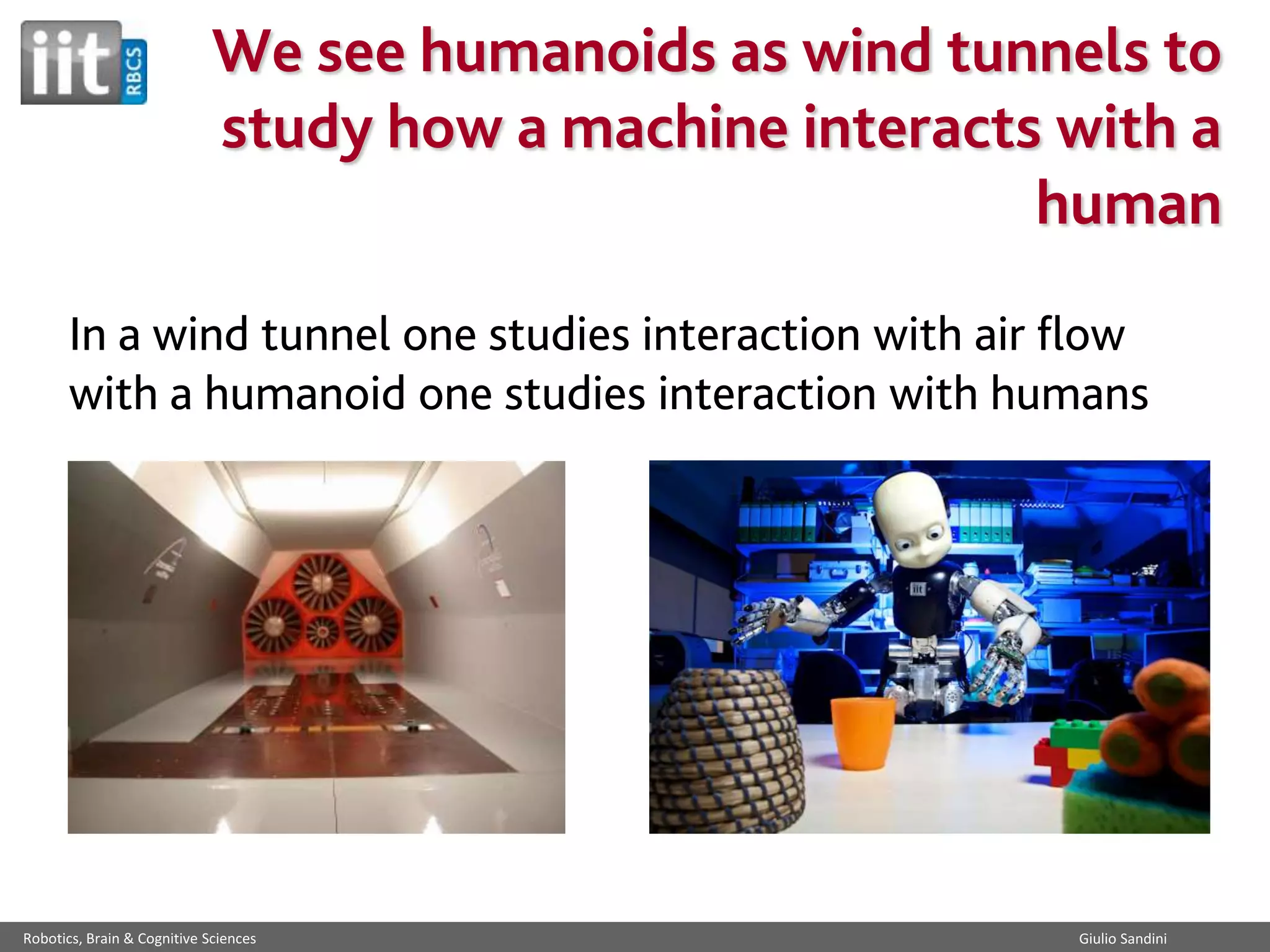
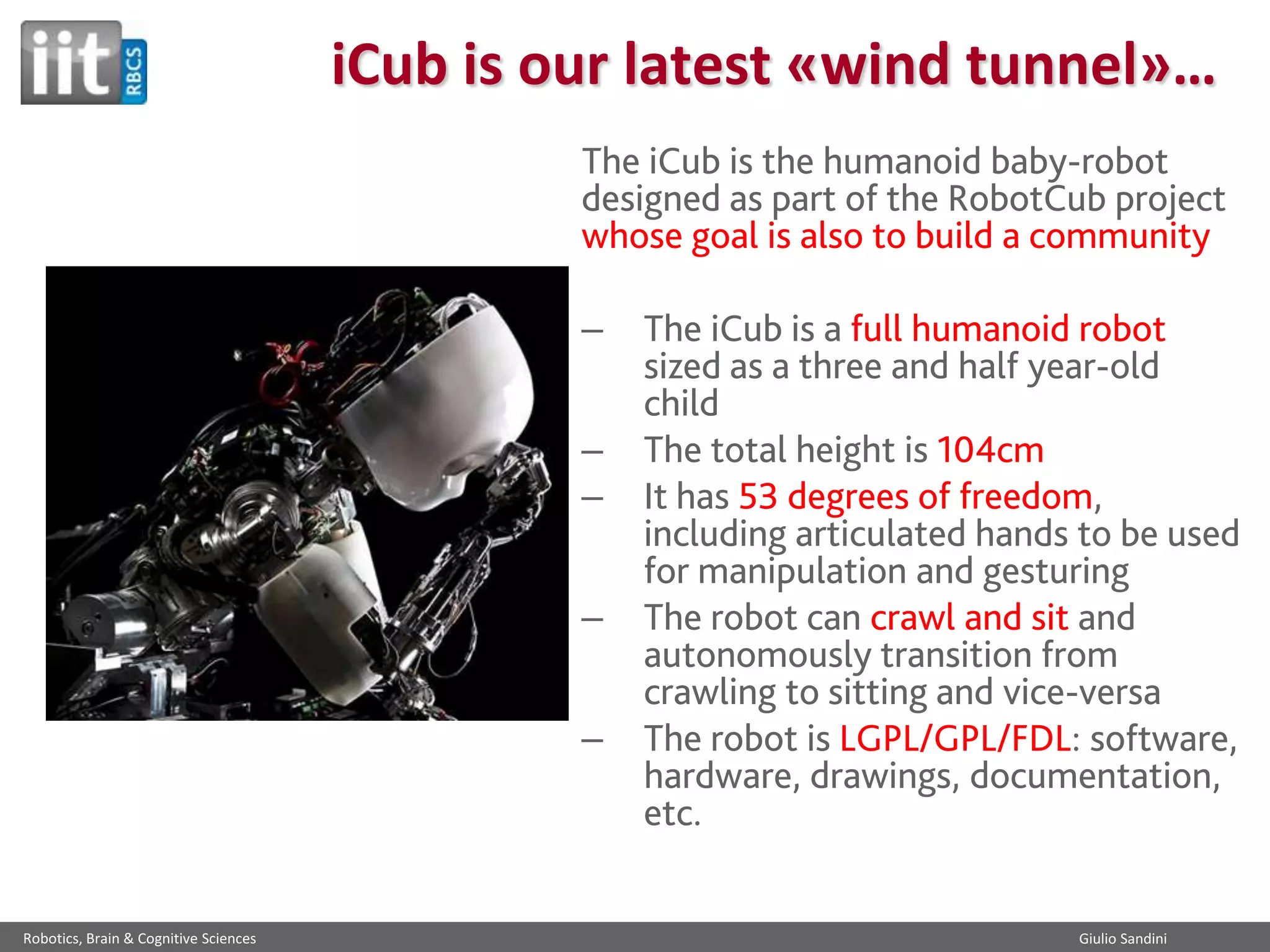
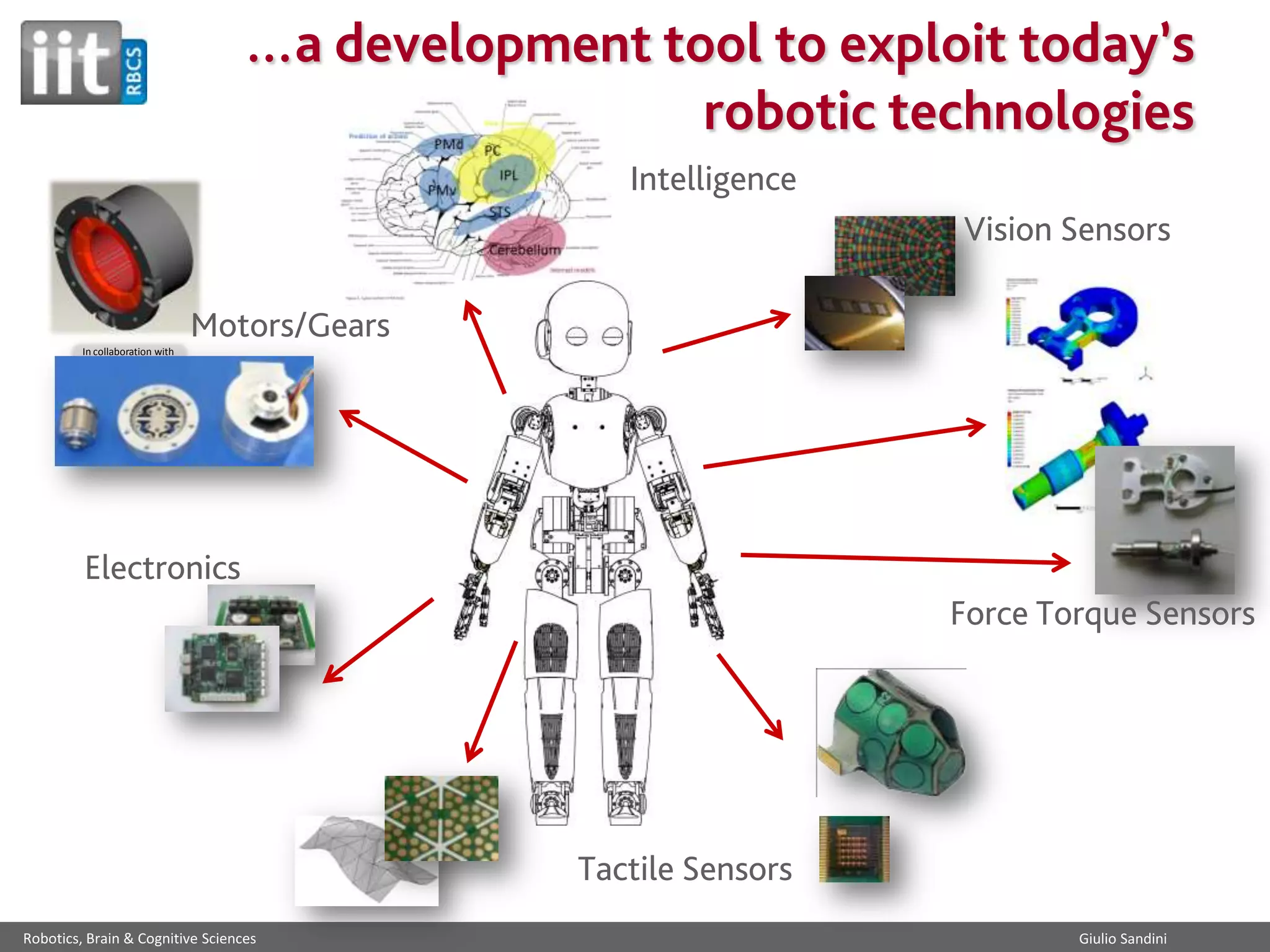
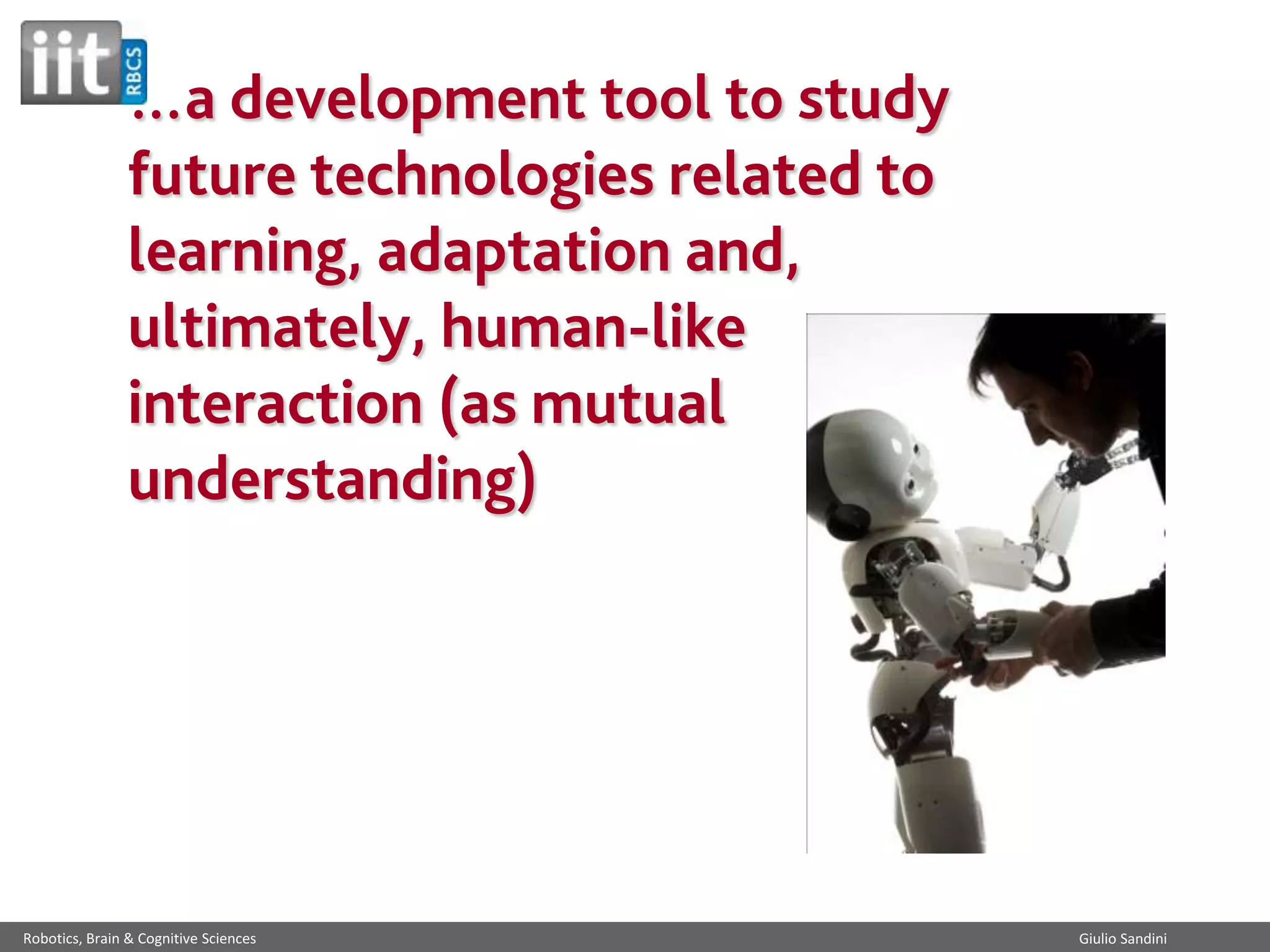
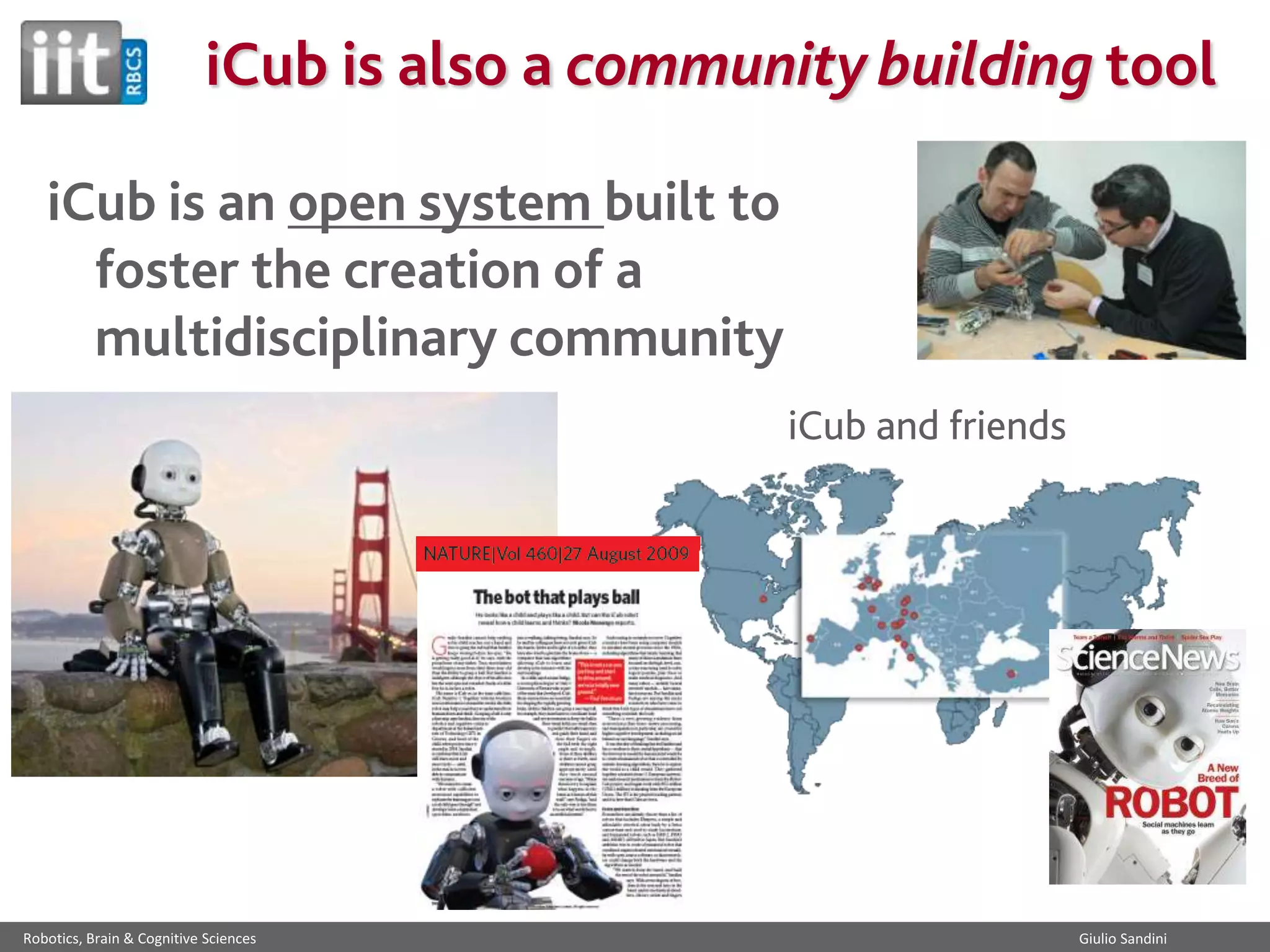
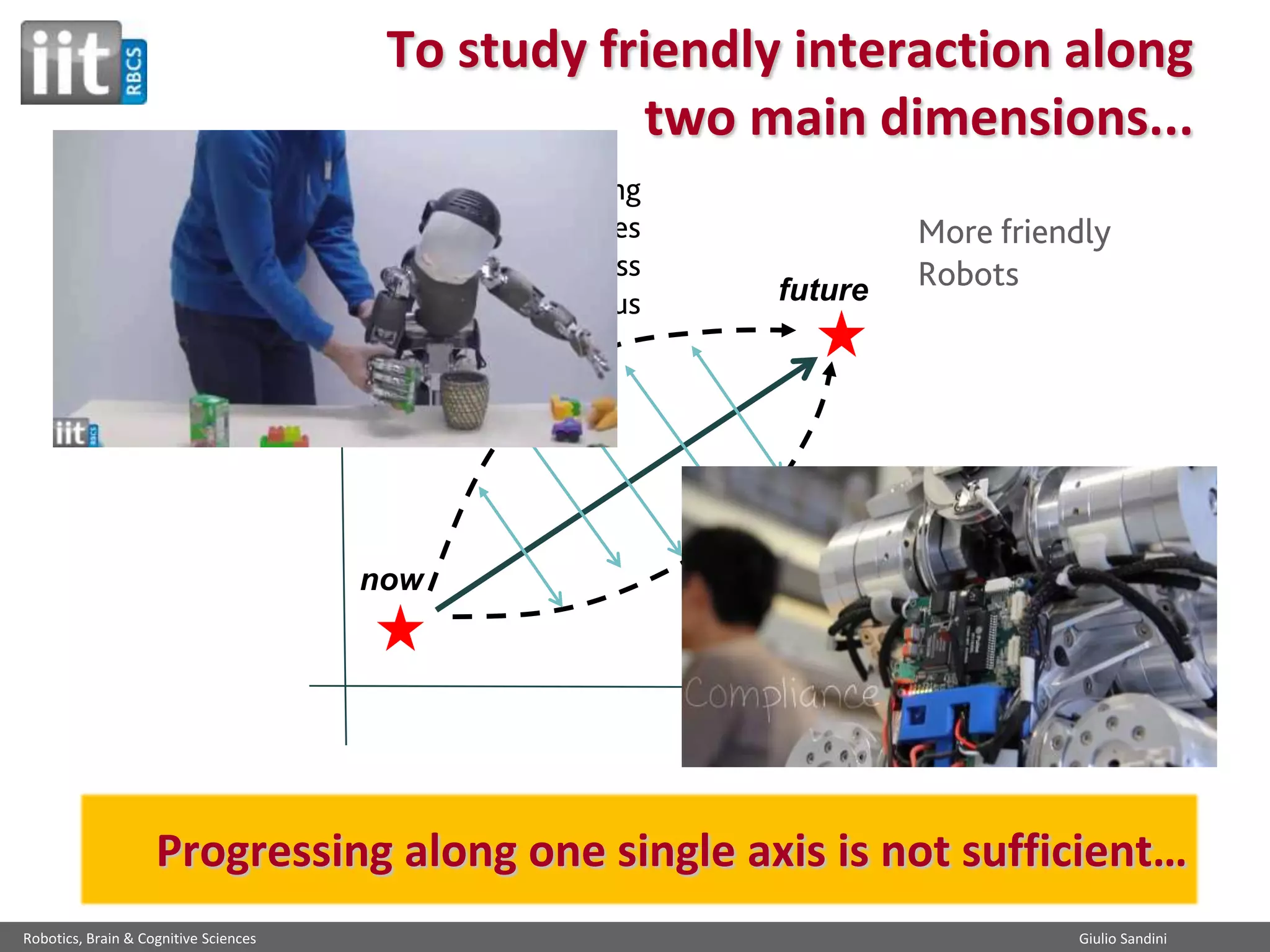
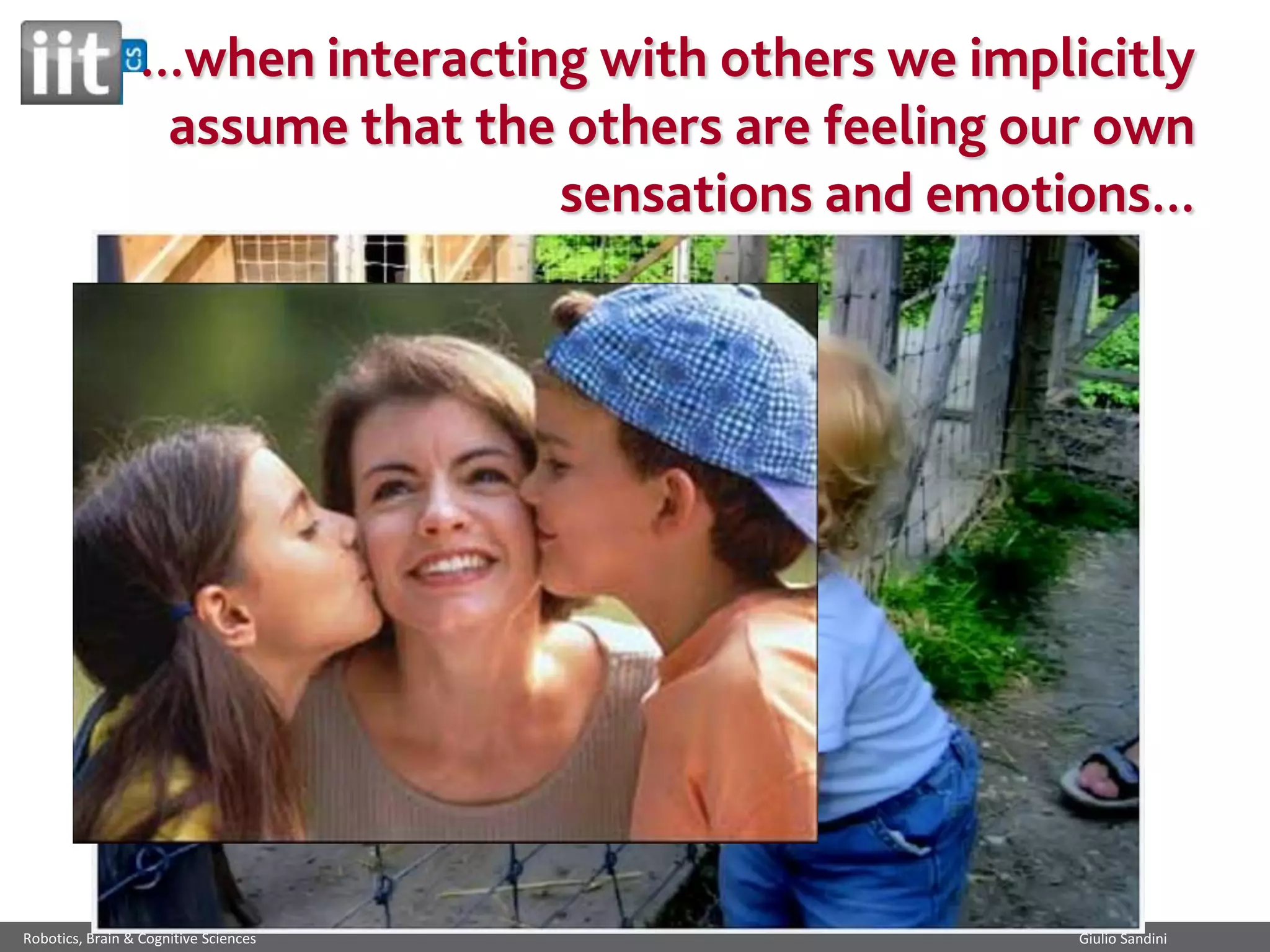
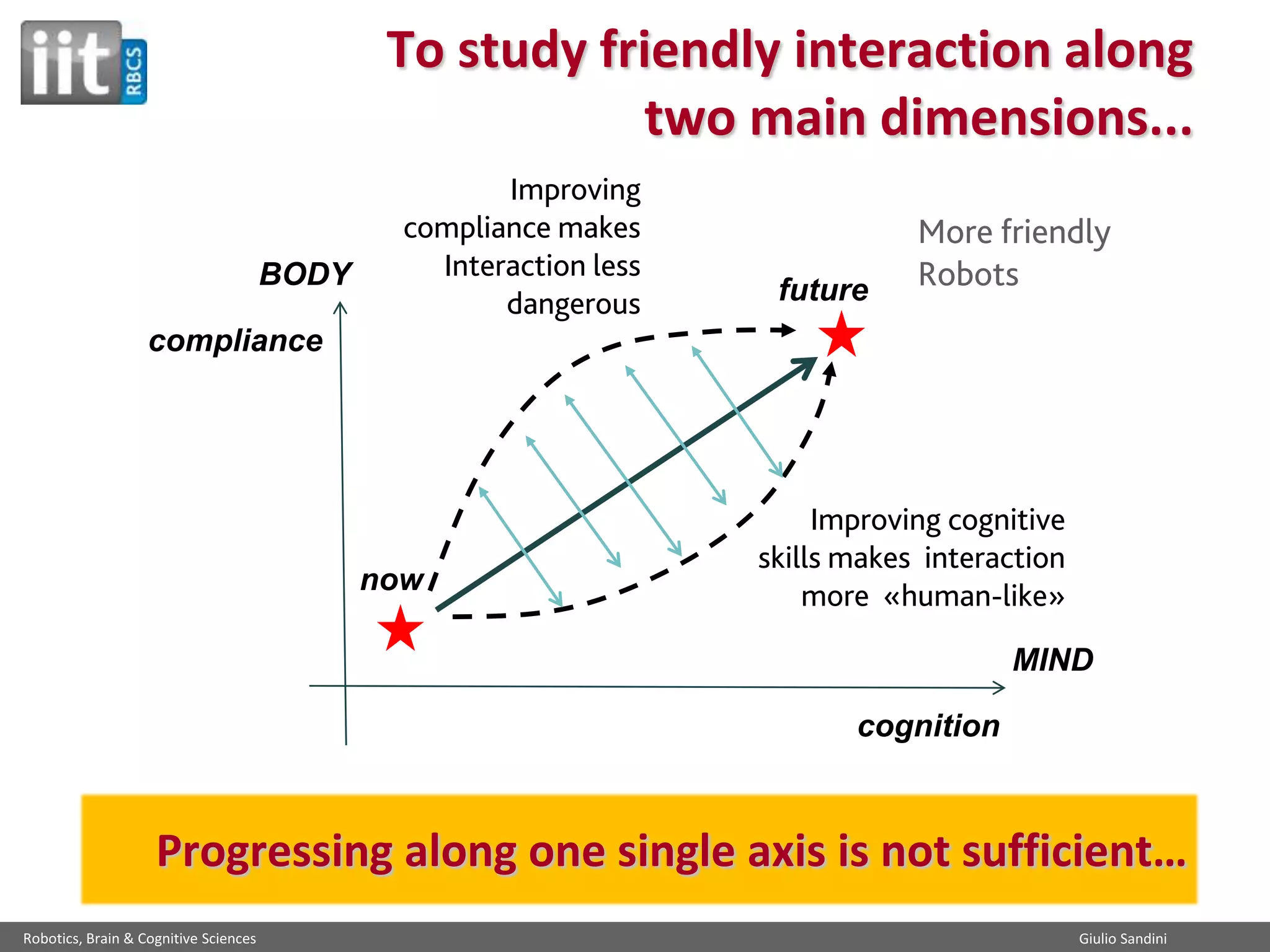
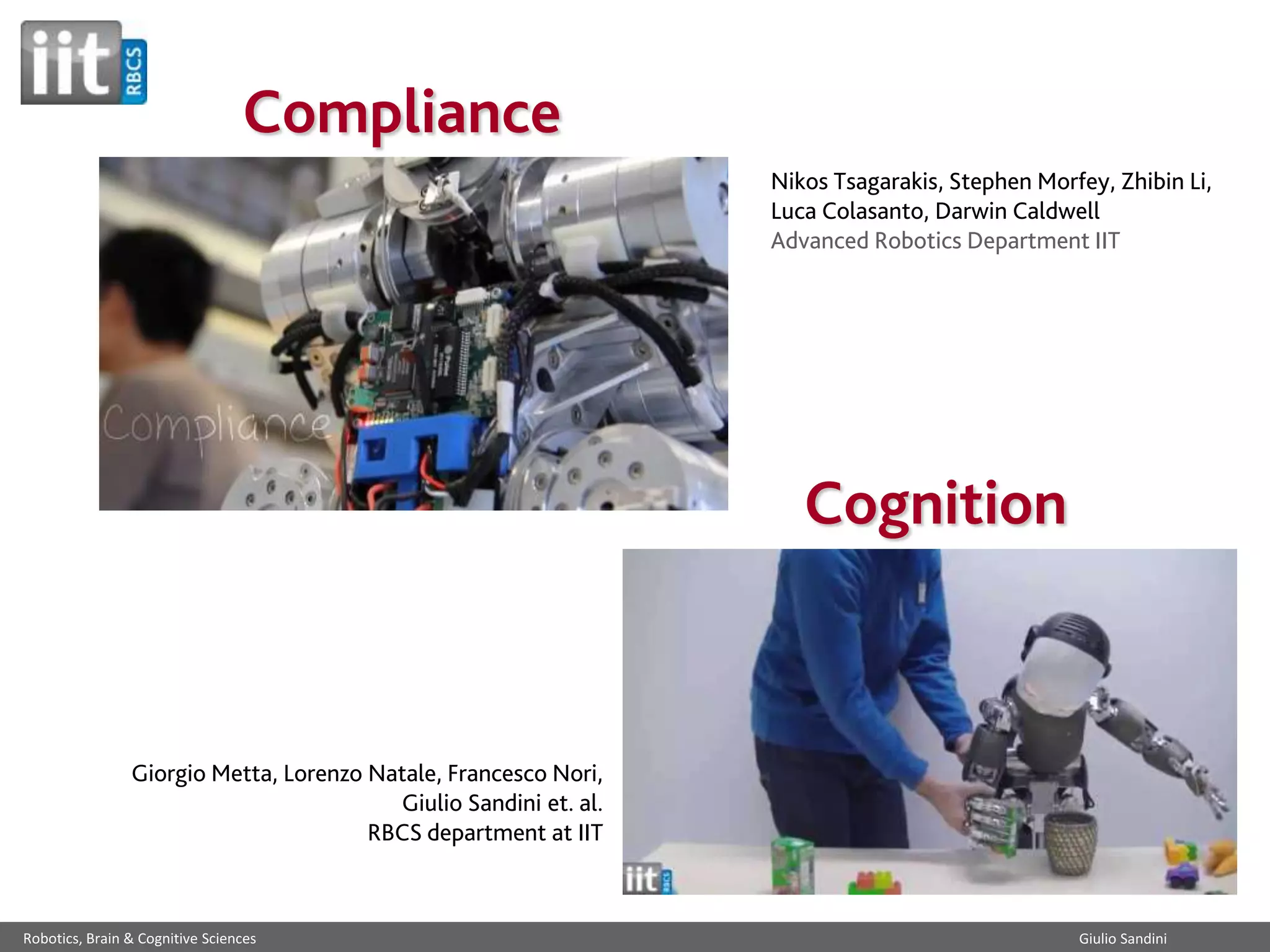


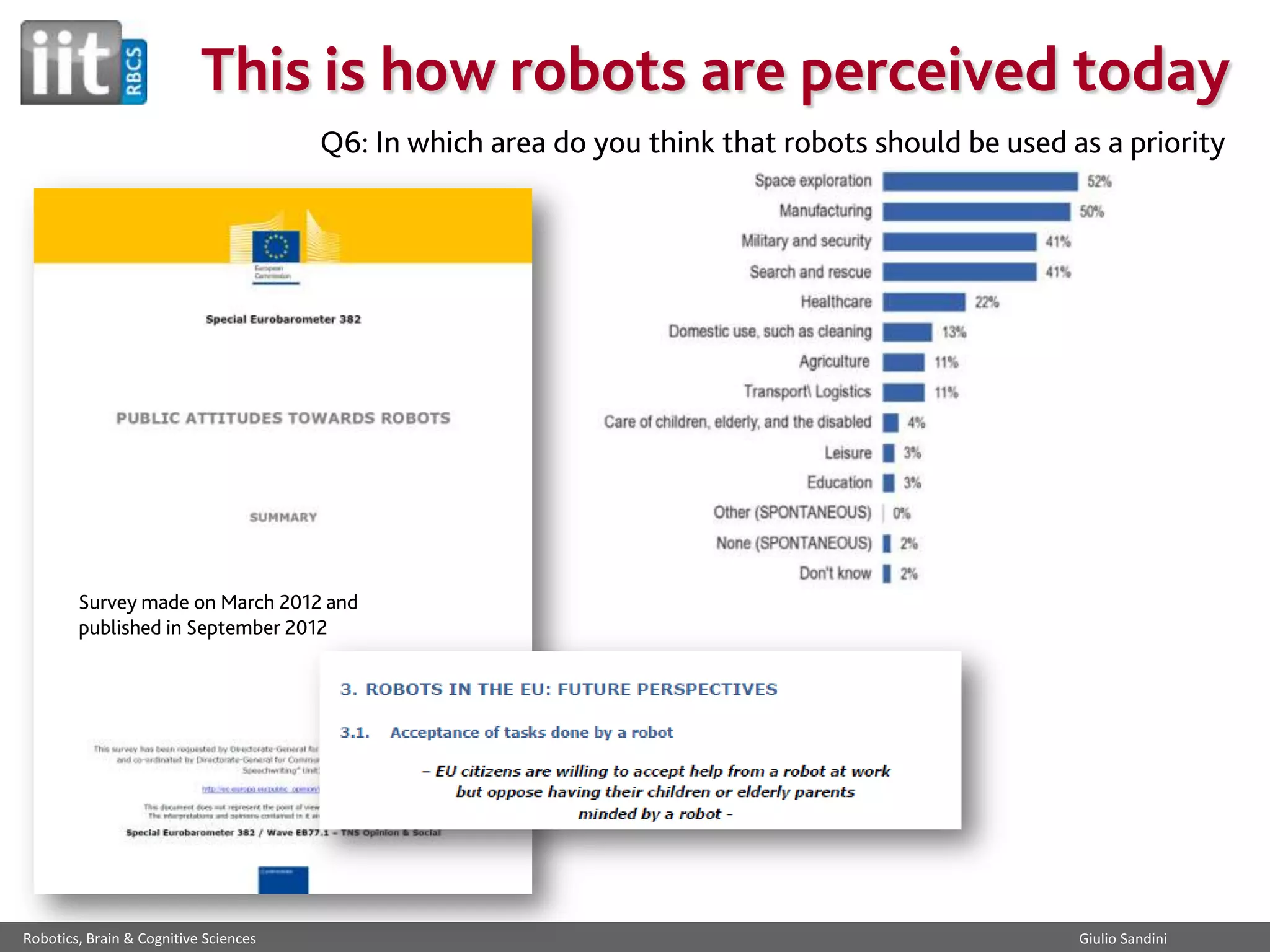

This document summarizes a presentation by Giulio Sandini on human-robot interaction. Sandini discusses two approaches to developing more human-like robots: improving compliance to make interactions less dangerous, and improving cognitive skills to make interactions more human-like. Sandini uses the iCub humanoid robot as a "wind tunnel" to study human-robot interaction and develop technologies for learning, adaptation, and ultimately mutual understanding between humans and machines. The challenges include ensuring safety by enabling robots to predict the outcomes of their own and others' actions, and developing technologies that will make robots more predictable and useful to humans.
























































![[Skolkovo Robotics 2015] Ефимов А. Перспективы развития робототехники в Росси...](https://cdn.slidesharecdn.com/ss_thumbnails/random-150326001739-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)
















![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)










