This document provides an introduction to the special theory of relativity, including:
- It defines the special theory of relativity as dealing with objects moving at constant speeds, while the general theory deals with accelerating objects.
- Frames of reference and inertial frames are introduced, with inertial frames obeying Newton's laws of motion.
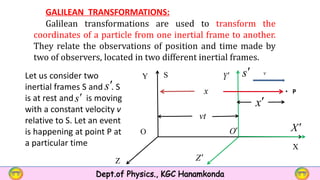
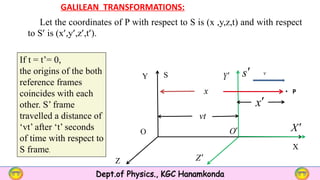
- Galilean transformations are described as relating the coordinates of particles between inertial frames, including equations for position, velocity, acceleration, and forces.
- The drawbacks of Galilean transformations are that they are invalid for objects moving at the speed of light or for electromagnetism.









































![The classical mechanics of the special theory of [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/theclassicalmechanicsofthespecialtheoryofautosaved-201210192631-thumbnail.jpg?width=640&height=640&fit=bounds)










![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)













