Download as PDF, PPTX


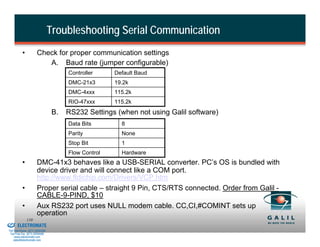
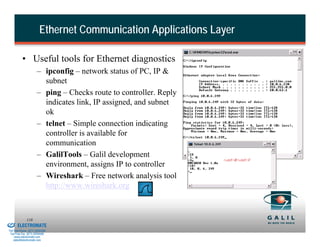
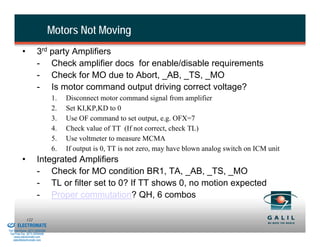
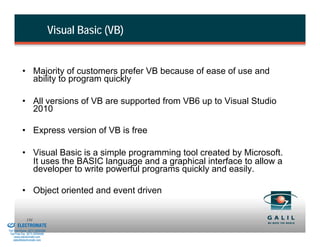
![Filter Operation
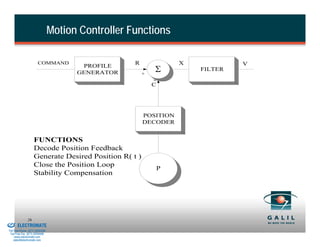
Proportional P(k) = KP · X(k)
Derivative D(k) = KD · [X(k) - X(k-1)]
Integral I(k) = KI · X(k) + I(k-1)
Functions:
Proportional For speed of response
Derivative For stability and damping
Integral For accuracy - slow response
& Serviced By:
27
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-27-320.jpg)
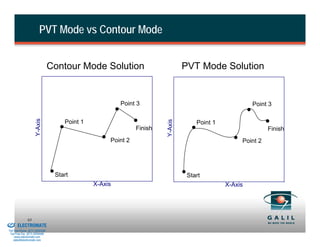
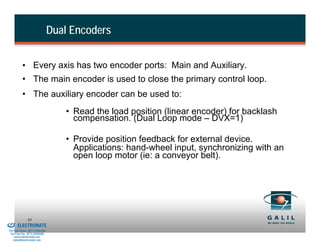
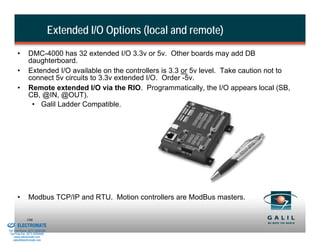
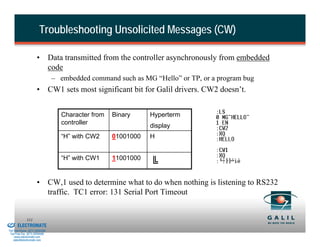
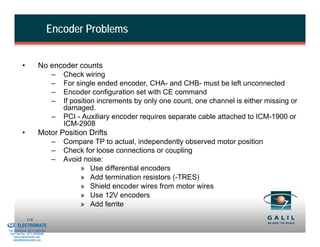
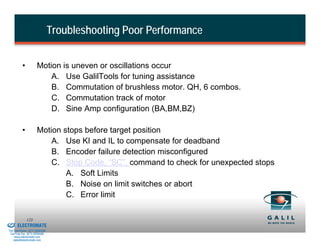
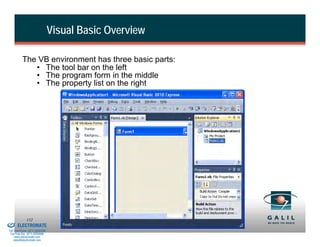
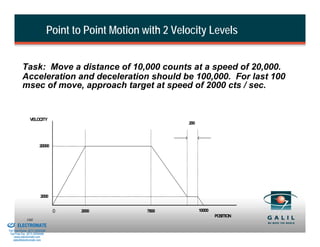
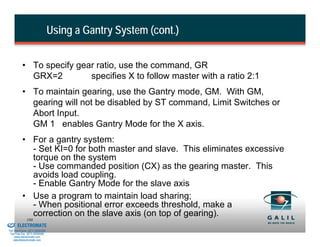
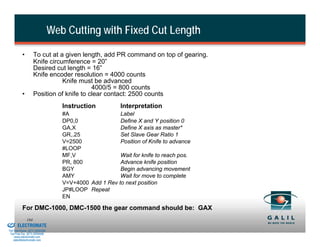
![Point to Point Positioning
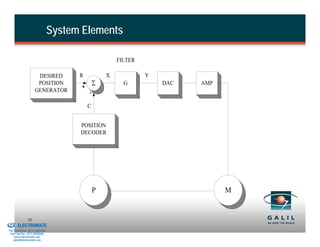
• Motion between specified axes is independent
• PR or PA Relative or Absolute Position [counts]
• Can change SP and AC during motion
• Example:
PR 1000, 4000 Specify relative position
SP 2500, 2500 Specify slew speed
AC 100000, 100000 Specify acceleration
DC 50000, 50000 Specify deceleration
BG XY Begin motion
AM XY Wait until motion complete
& Serviced By:
47
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-47-320.jpg)
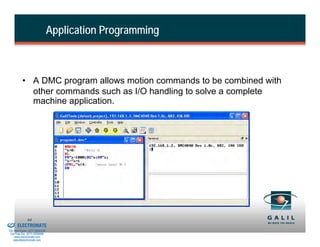
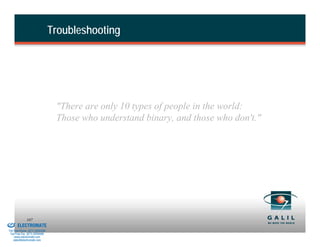
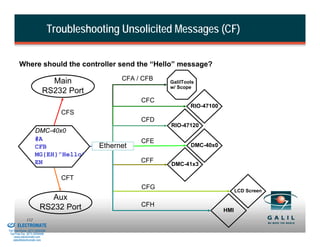
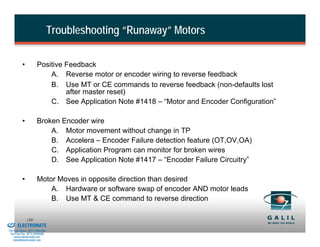
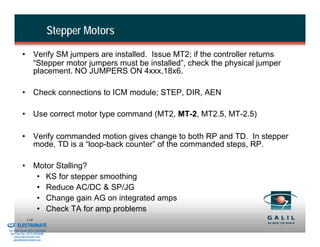
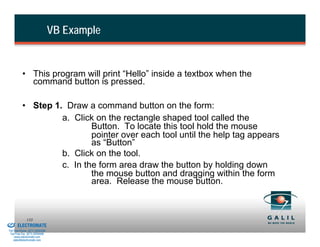
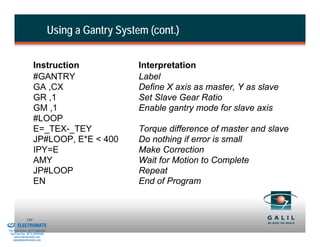
![Jogging
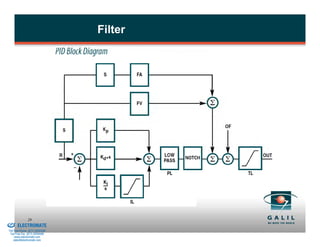
• User specifies:
JG Jog speed and direction [counts/sec]
ST Stop motion
• Can change JG, AC, DC during motion
• Example:
JG -1000 Specify jog speed
AC 200000 Specify acceleration rate
DC 200000 Specify deceleration rate
BG X Begin motion
& Serviced By:
48
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-48-320.jpg)
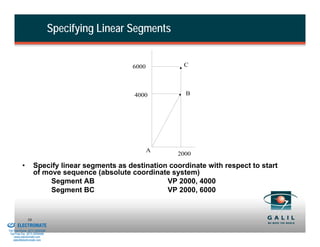
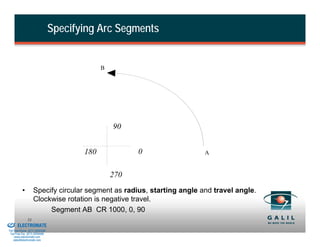
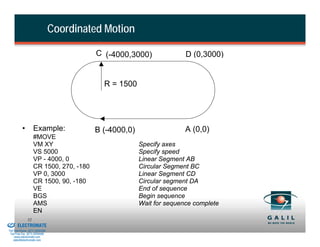
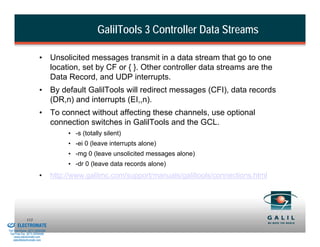
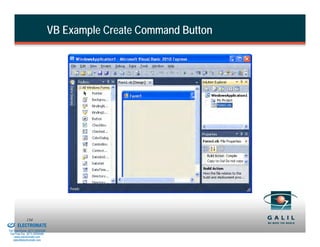
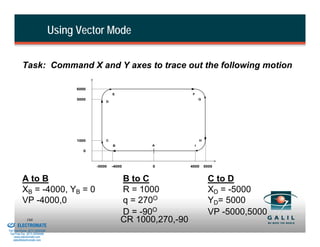
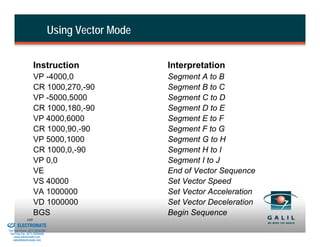
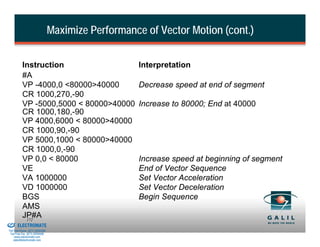
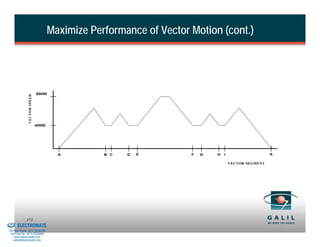
![Vector Mode
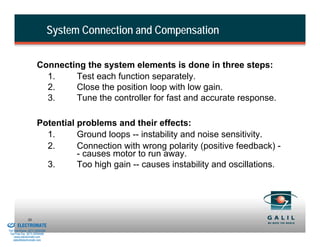
• Linear and circular interpolation on two axes
• VM Specify axes
VP Linear segment [counts]
CR Circle arc segment [counts]
VS Vector speed [counts/sec]
VA Vector acceleration [counts/sec2]
VD Vector deceleration [counts/sec2]
VE End sequence
BGS Begin sequence
• Up to 511 segments can be given prior to motion
• Can send additional segments during motion
• Can change VS and VA during motion
• Can specify start and end speed with each segment using
VP <n
& Serviced By:
49
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-49-320.jpg)
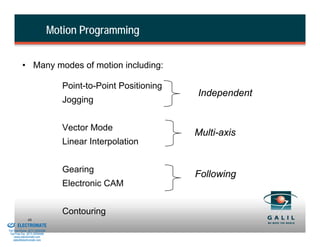
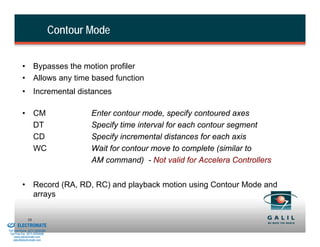
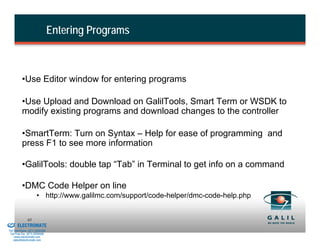
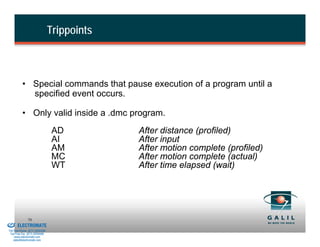
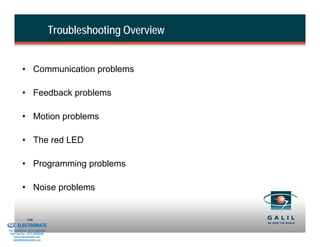
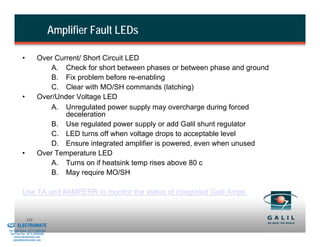
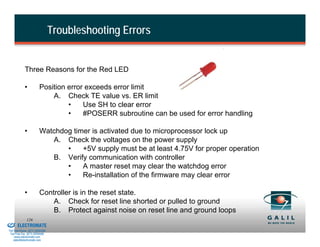
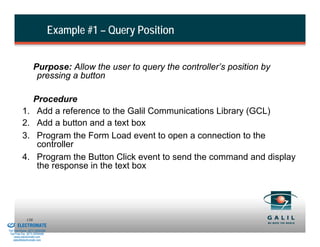
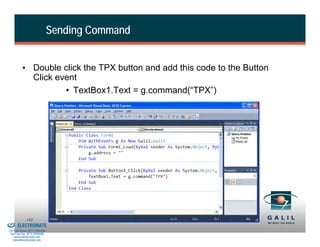
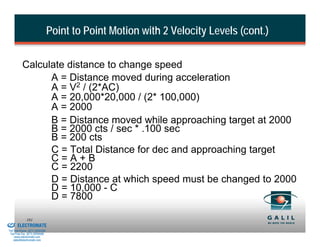
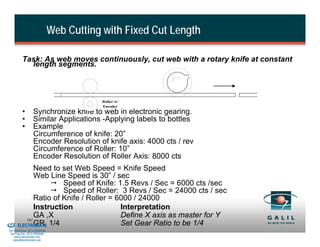
![ECam Example
EAY Y axis is master
EM 0, 4000 X (slave) change is 0 counts. Y (master) change is 4000
EP 2000 Master interval is 2000 counts between entries
ET[0] = 0 ECAM table defines positions of slaves
ET[1] = 1000 3 points, 2 intervals
ET[2] = 0
EB1 Enable ECam mode
EG -1 Engage slave immediately
JGY = 500 Jog master at 500 counts per second
BGY Begin master motion
X Slave Position (counts)
Cam Table
1000
500
& Serviced By:
0 1000 2000 3000 4000
57
ELECTROMATE Y Master Position (counts)
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-57-320.jpg)
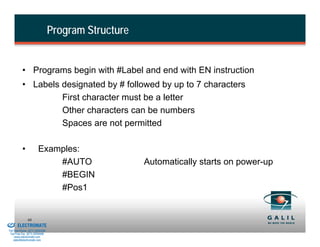
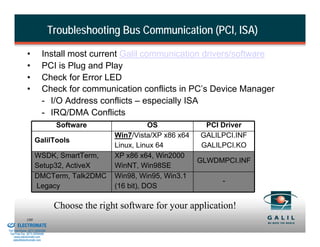
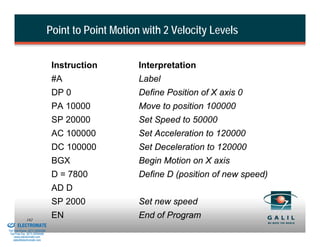
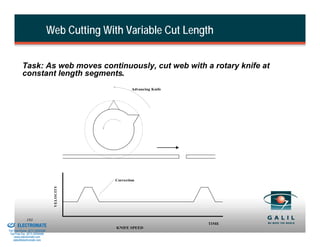
![Multitasking -- Example
• Example to Download:
#X X-Thread
PR 1000;BGX;AMX Move 1000
PR-1000;BGX;AMX Move-1000
JP #X Repeat Motion
#Y Y-Thread
PR,500;BGY;AMY Move 500
PR,-500;BGY;AMY Move -500
JP#Y Repeat Motion
#TIME I/O Thread
AT-50;SB1;AT-10;CB1 Every 50 msec Set Bit 1
JP#TIME Repeat
#MAIN Main Thread
JP#EXIT,@IN[1]=0 If input 1 low, exit
JP#MAIN Loop if input 1 high
#EXIT
AB Abort Motion and Program
EN End Program
• To execute from host/terminal:
XQ#MAIN,0
XQ#X,1
XQ#Y,2
XQ#TIME,3
& Serviced By:
76
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-76-320.jpg)
![Arrays
• For storing and collecting data (ideal for contour mode, teach,
and playback)
• One dimensional
• Each entry has same numerical range as variable
• Arrays defined by a name and number of entries
DM posx[7] Defines an array named posx with
seven entries
• Can automatically capture certain types of data, such as position,
error and commanded torque, into arrays over specified time
intervals
& Serviced By:
81
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-81-320.jpg)
![Record Data Mode
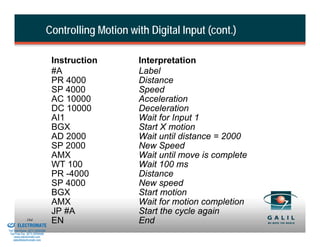
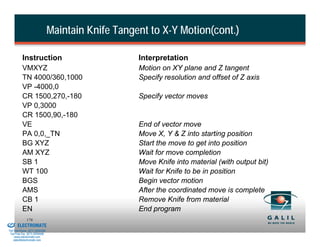
Instruction Interpretation
#RECORD; ‘Label
DM yerr[100]; ‘Dimension array
RA yerr[ ]; ‘Specify record mode
RD _TEY; ‘Data type for record
RC 4, 100; ‘Actual recording
EN; ‘End program
& Serviced By:
82
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-82-320.jpg)
![Mathematical and Functional Expressions
Mathematical Operators Logical Operators
&
+ - * /
|
@SIN[n] @COS[n] @COM[n]
@ABS[n] @FRAC[n]
@INT[n] @RND[n]
@TAN[n] @ATAN[n]
@ASIN[n] @ACOS[n]
@SQR[n]
Note: Math order of operations is left to right. Use
( ) parenthesis for correct order of operations
& Serviced By:
83
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-83-320.jpg)
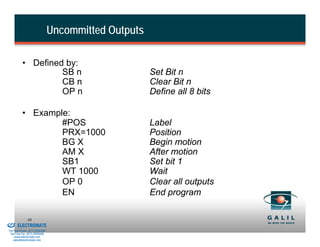
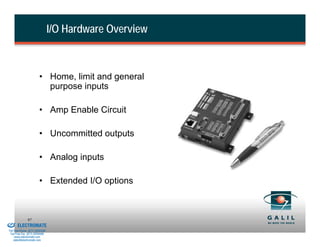
![Uncommitted Inputs
• Available commands:
AI +/- n Wait for input n high/low
II n Interrupt if input n occurs
TI n Return state of all inputs in block n
MG@IN[1] Return state of input 1
TZ Returns all status of all i/o points
• After Input Example:
#JOG Jog program
JGX=1000 Jog speed
AI 1 After Input 1 high
BG X Begin motion
AI - 1 After Input 1 low
ST X Stop motion
& Serviced By:
87
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-87-320.jpg)
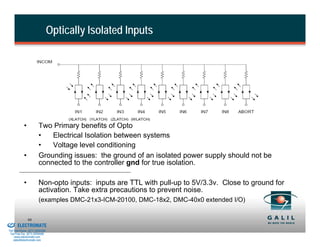
![Analog Inputs
• + 10 Volts with 12 bit resolution (16-bits optional)
• AQ to adjust input range 0-10V, 0-5V, +/-5, differential
(AQ not available on all controllers)
• Available commands:
a1 = @AN[n] set variable a1 to analog input (in volts)
• Analog Input Example
#JOYSTK Joystick
JG0 Jog mode
BGX
#LOOP Loop
a1 = @AN[1] Read analog input
JGX= a1*1000 Change jog speed
JP #LOOP Repeat
EN End program
& Serviced By:
89
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-89-320.jpg)
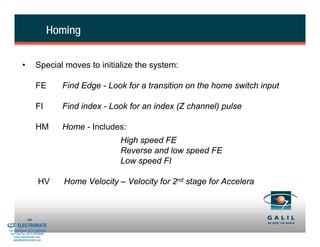
![Encoder Synchronization
• High Speed Latch – Save encoder position when input occurs
• Use inputs 1-4 for latch inputs. IN[1] for X, IN[2] for Y, etc.
• ALx arms latch and _RLx stores the position once the position is captured.
• Captures position on state transition of specified input.
• Latch speed on TTL input is less than 1µs, low-going opto-isolated input is
12µs, 35 µs for high-going.
• Output Compare – Pulse output at encoder position
• One-Shot and circular/modular compare possible
• OC command sets up all behavior
• Powerful for position based external hardware synch
(e.g. laser marking, raster scans)
& Serviced By:
100
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-100-320.jpg)
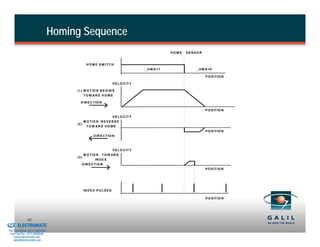
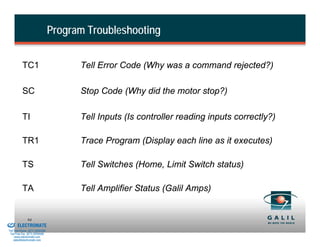
![Command/Program Execution Problems
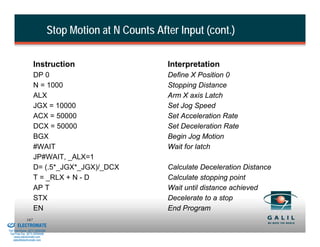
Command Description
TR1 Trace. Prints each command as it's executed.
Print message strings, variables, and controller
MG parameters.
Print current line number that is executing in
MG _XQn thread n (or -1 if thread is not running)
LV List all declared user variables and their values
LS List the controller program
LS first line, last line List a program section
LS_XQn,_XQn List current running line of code
QU array[] Print the contents of a given array
SC Stop code for axis
Tell error code and brief description (reason for
TC1 controller returning a "?")
#CMDERR Automatic sub, runs on crashed thread
XQ Begin Program
ST Stop Program
BK line Set breakpoint at line
BK Resume from breakpoint
SL Single Step
& Serviced By:
125
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-125-320.jpg)
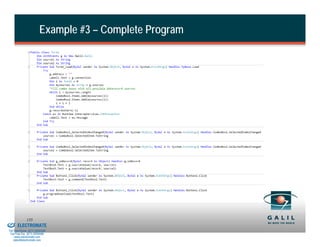
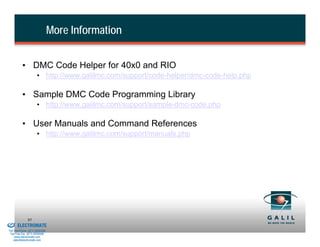
![Drive X-Y with Velocity (cont.)
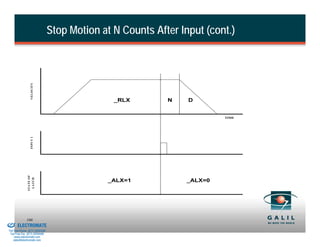
Instruction Interpretation
#JOYS Label
AC 100000 Set Acceleration
DC 100000 Set Deceleration
JG 0,0 Set in Jog Mode
BG XY Start Motion
#LOOP Label
VX=@AN[1]*20000 Read joystick & compute speed X
VY=@AN[2]*20000 Read joystick and compute speed Y
JG VX, VY Change speeds
JP #LOOP Repeat
& Serviced By:
159
EN End program
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-159-320.jpg)
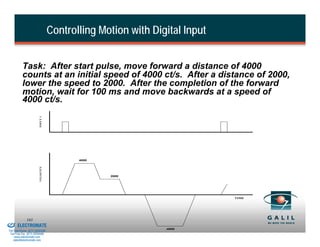
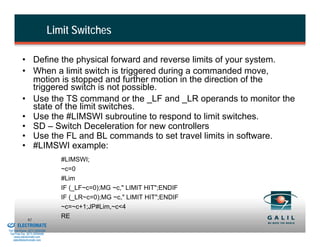
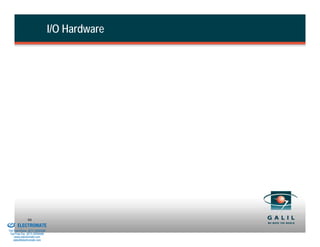
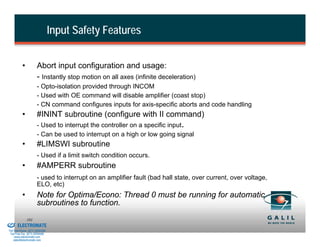
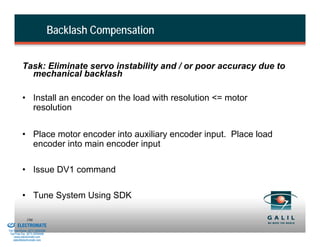
![Pause Motion
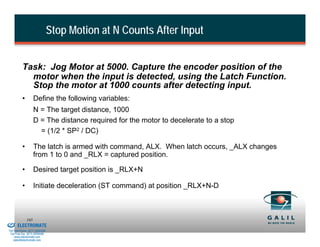
Task: When input is triggered, decelerate vector motion to a stop,
when input is de-activated, resume motion
• Create #ININT subroutine in Program
• Use General Use Input to generate interrupt
• Set Vector Speed, VS, to zero
• Pause while interrupt remains active
Instruction Interpretation
II1 Set X axis only for vector motion
#LOOP Vector motion path
VP -4000,0
CR 1500,270,-180
VP 0,3000
CR 1500,90,-180
VE
BGS;AMS
JP#LOOP Repeat motion when done
EN
#ININT Input Interrupt routine
N= _VS Save Current Vector Speed
VS 0 Set Speed to 0
#PAUSE Wait while input is active
JP#PAUSE,@IN[1]=0
& Serviced By:
185 VSN Resume
ELECTROMATE RI1 Return from interrupt
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/galilmotioncontrolproductworkshopjanuary2012presentationeisver-111124080254-phpapp01/85/Galil-motion-control-product-workshop-january-2012-presentation-eis-ver-185-320.jpg)

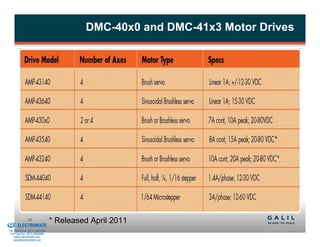
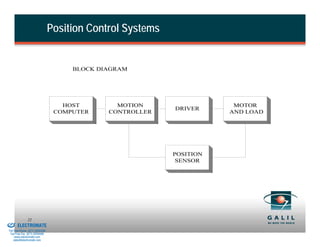
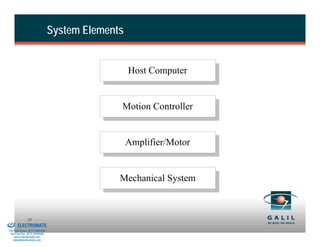
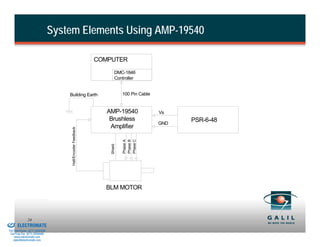
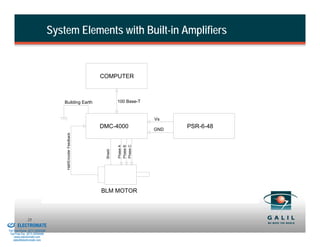
This document summarizes Galil's product workshop in January 2012. It discusses Galil's history and reputation in motion control dating back to 1983. It then provides an overview of Galil's technical support resources and capabilities. The document proceeds to describe Galil's latest motion controller and driver products, including the DMC-40x0, DMC-41x3, DMC-300xx, and RIO-47xxx. It also outlines the basic functions and elements of a position control system using a motion controller, amplifier, and motor.





















































































