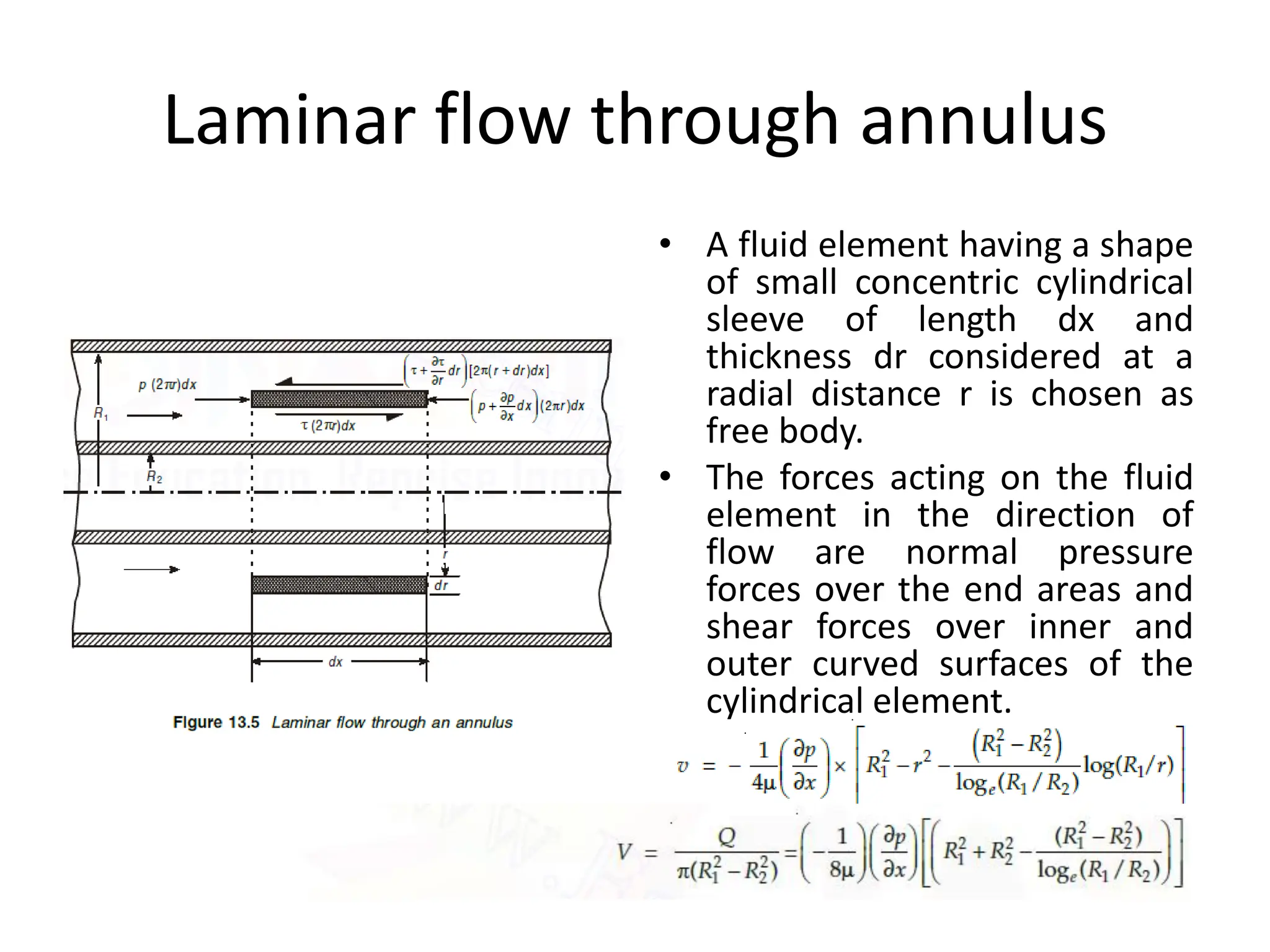
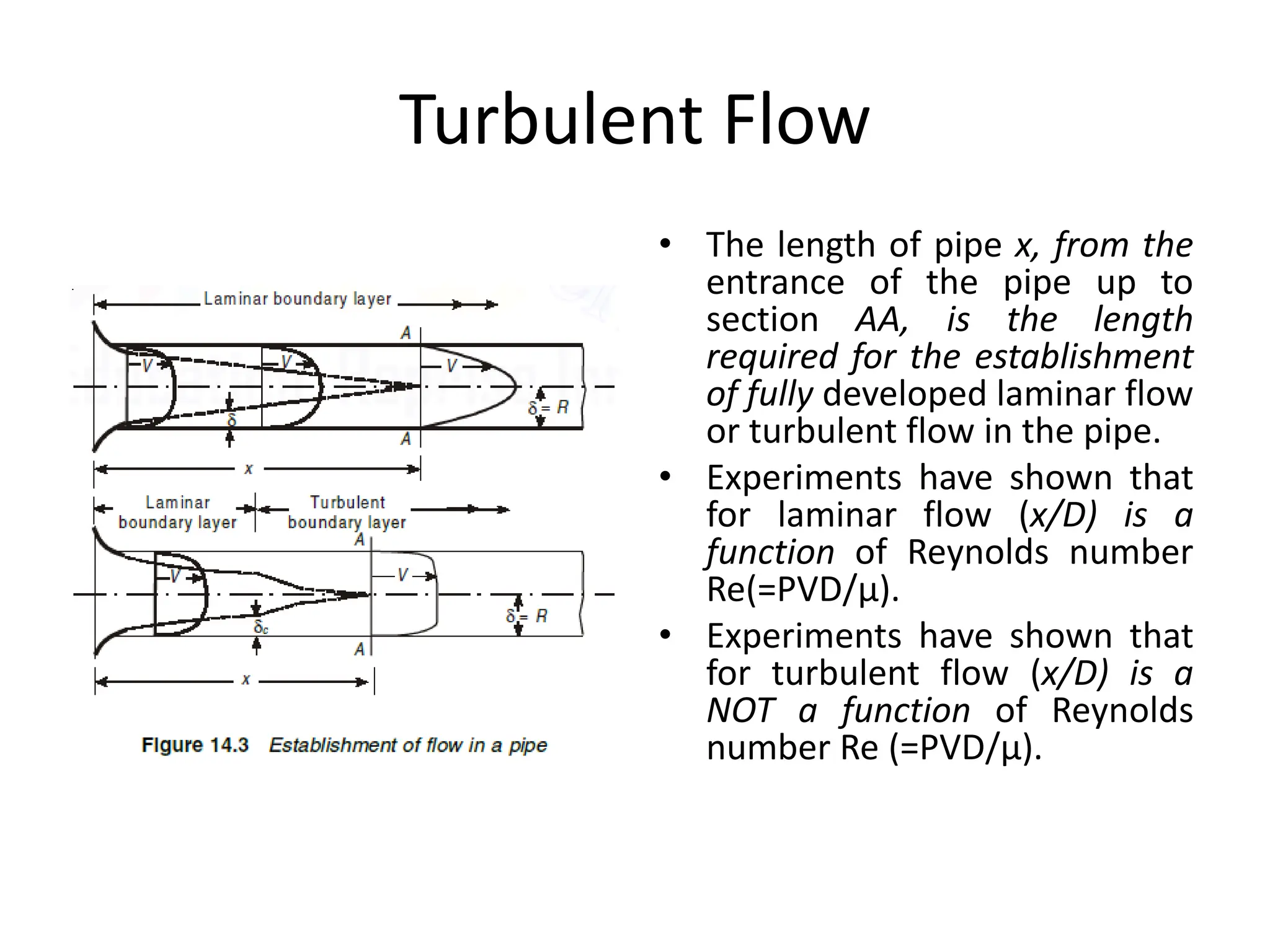
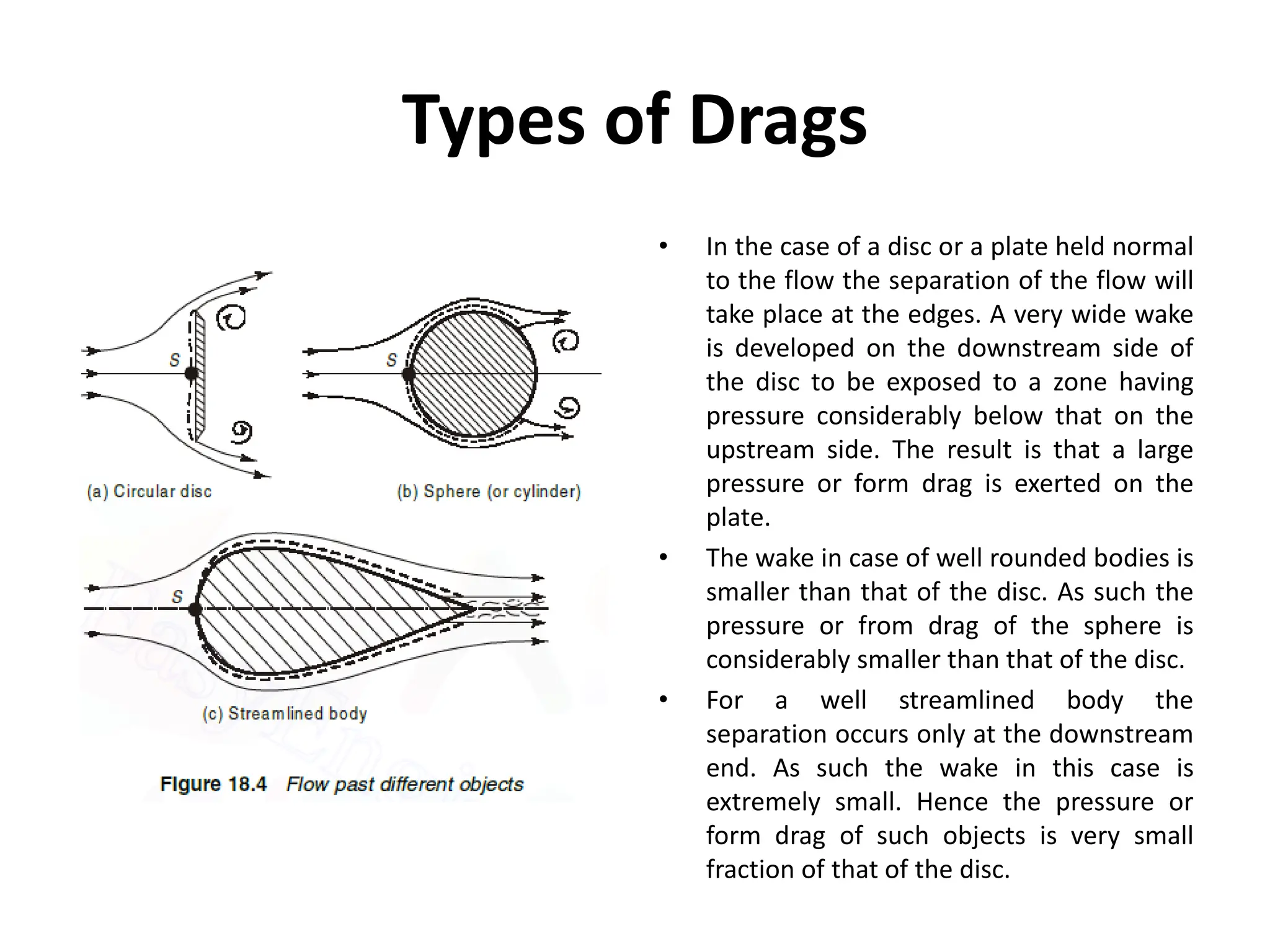
The document discusses boundary layer theory in fluid dynamics, detailing the concepts of boundary layer thickness, momentum thickness, and energy thickness, along with factors affecting them. It explores laminar and turbulent flow characteristics, equations governing the flow, and methods of controlling boundary layer separation. Additionally, it addresses the effects of turbulence and drag forces on submerged bodies, concluding with expressions for drag and lift coefficients in fluid flow.