Downloaded 23 times

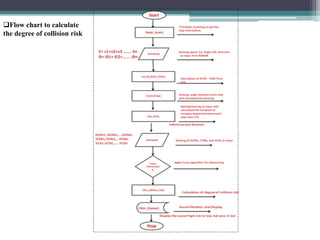
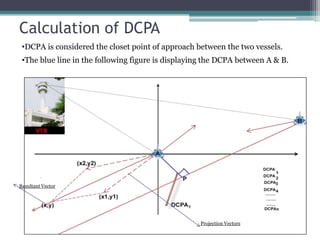
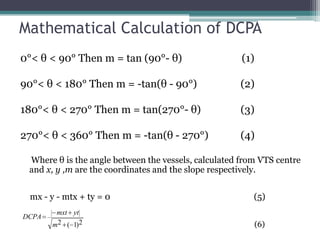
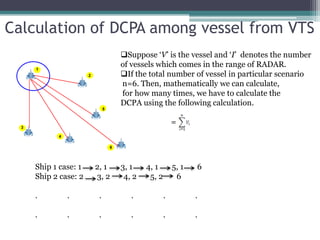
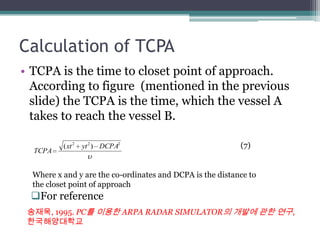
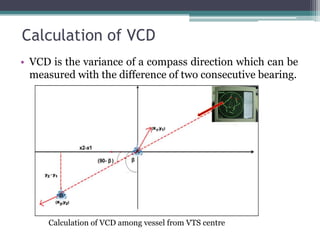
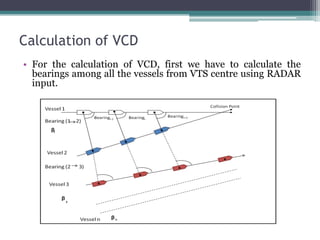
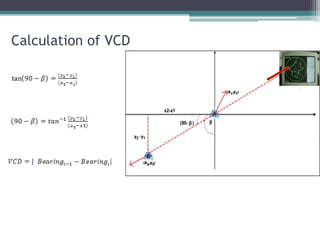
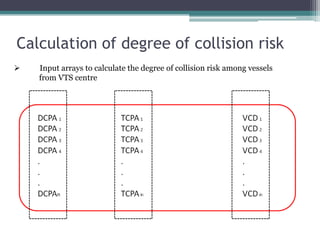
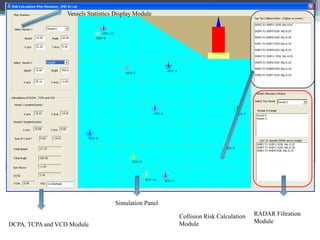
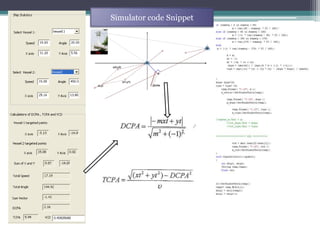
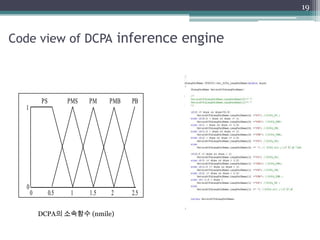
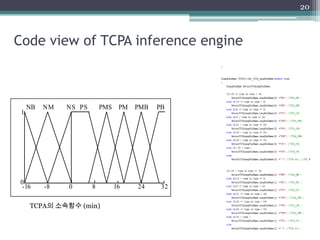
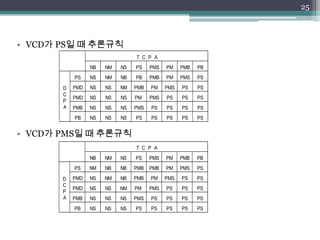
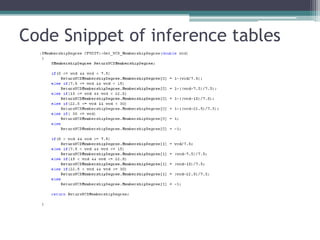
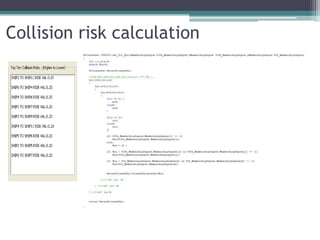
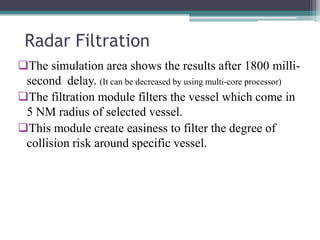
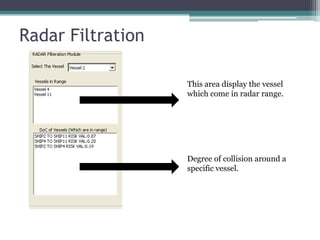

The document discusses the development of a fuzzy inference-based collision risk detection system for maritime traffic management due to increasing vessel numbers, addressing the limitations of conventional VTS centers that rely on manual processes. The proposed system utilizes metrics such as DCPA, TCPA, and VCD for multi-vessel collision risk calculations, enhanced by a graphical simulator. Results of simulations validate the accuracy of the collision risk assessments and suggest future development directions.

























































