Downloaded 15 times


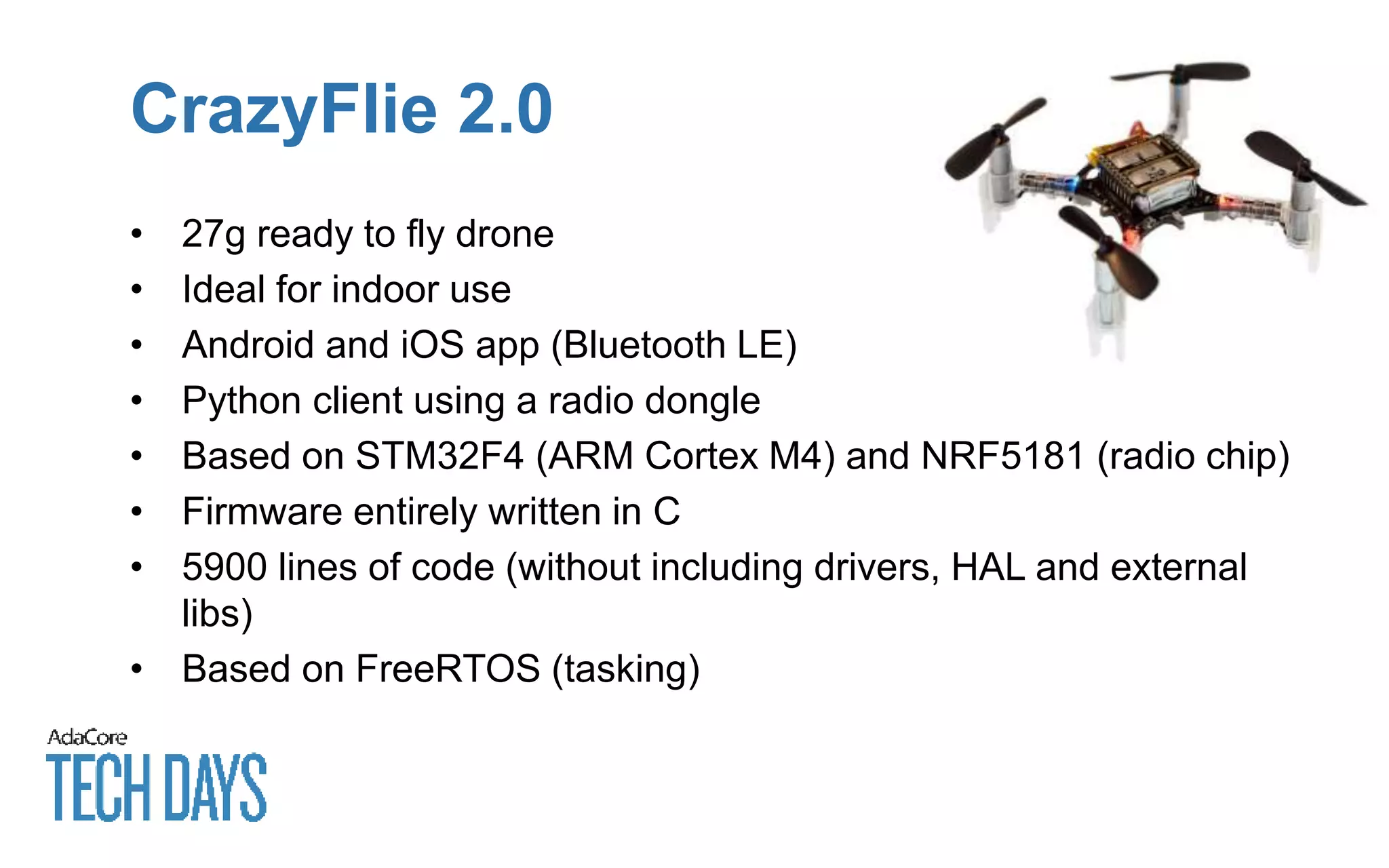
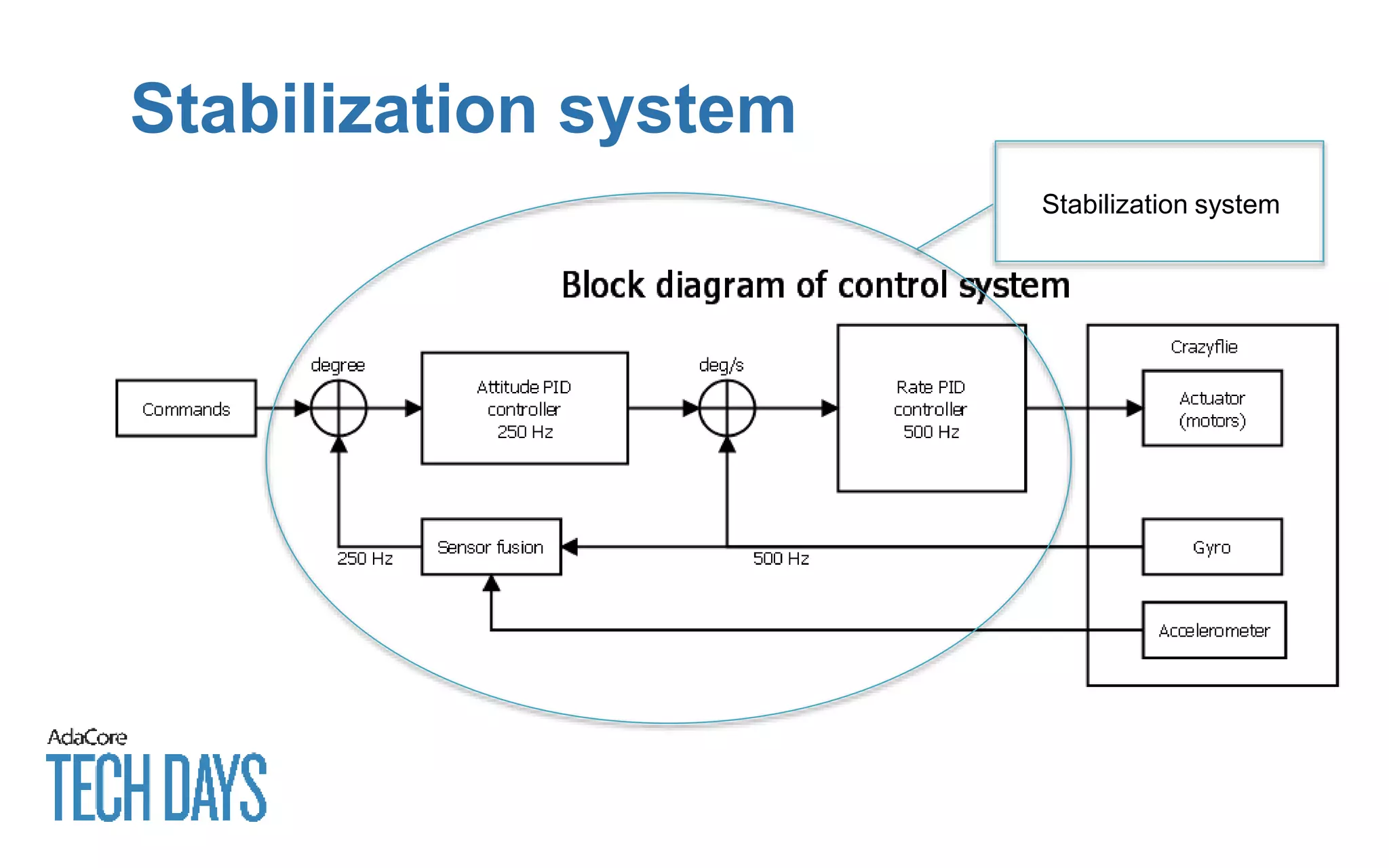
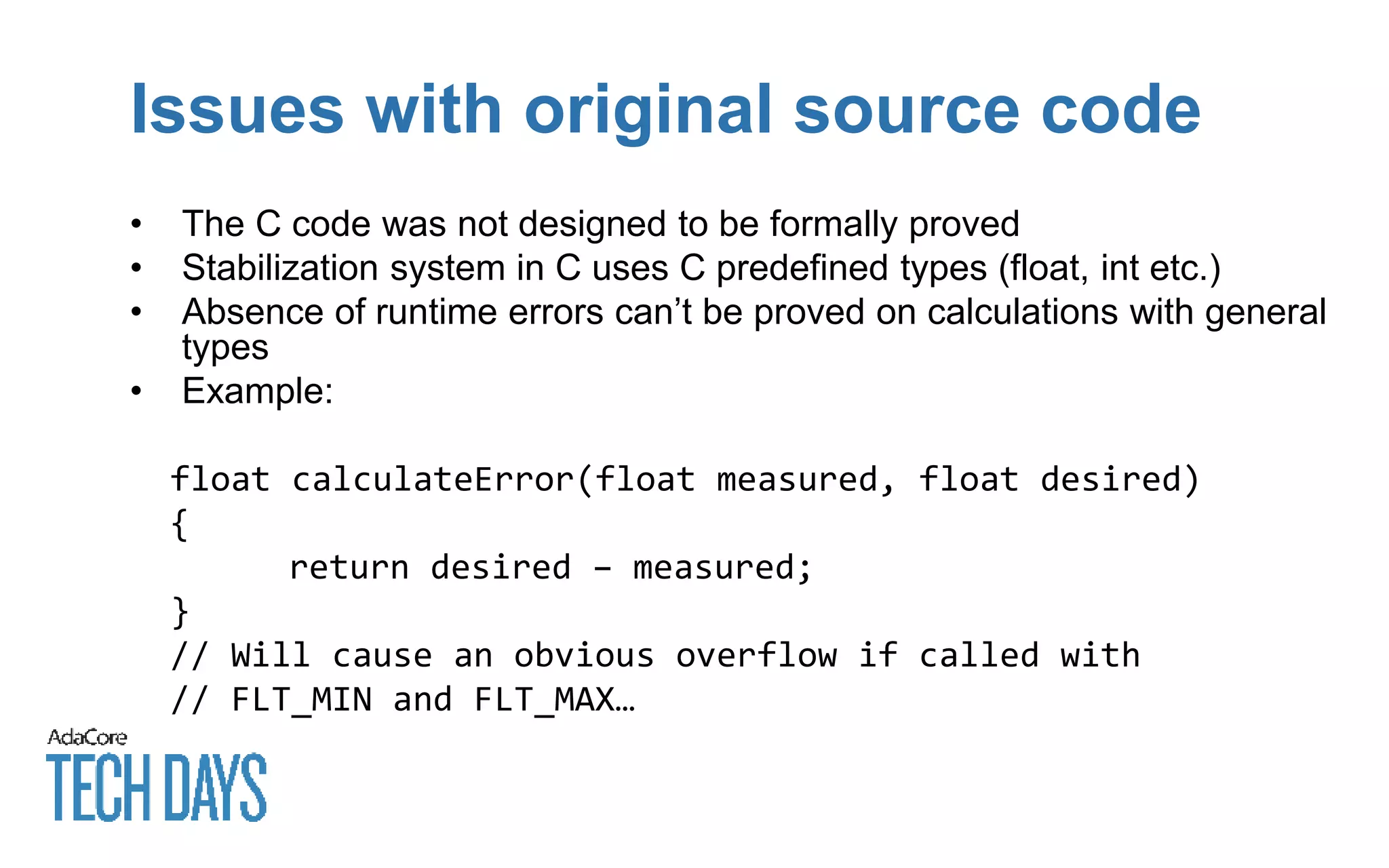
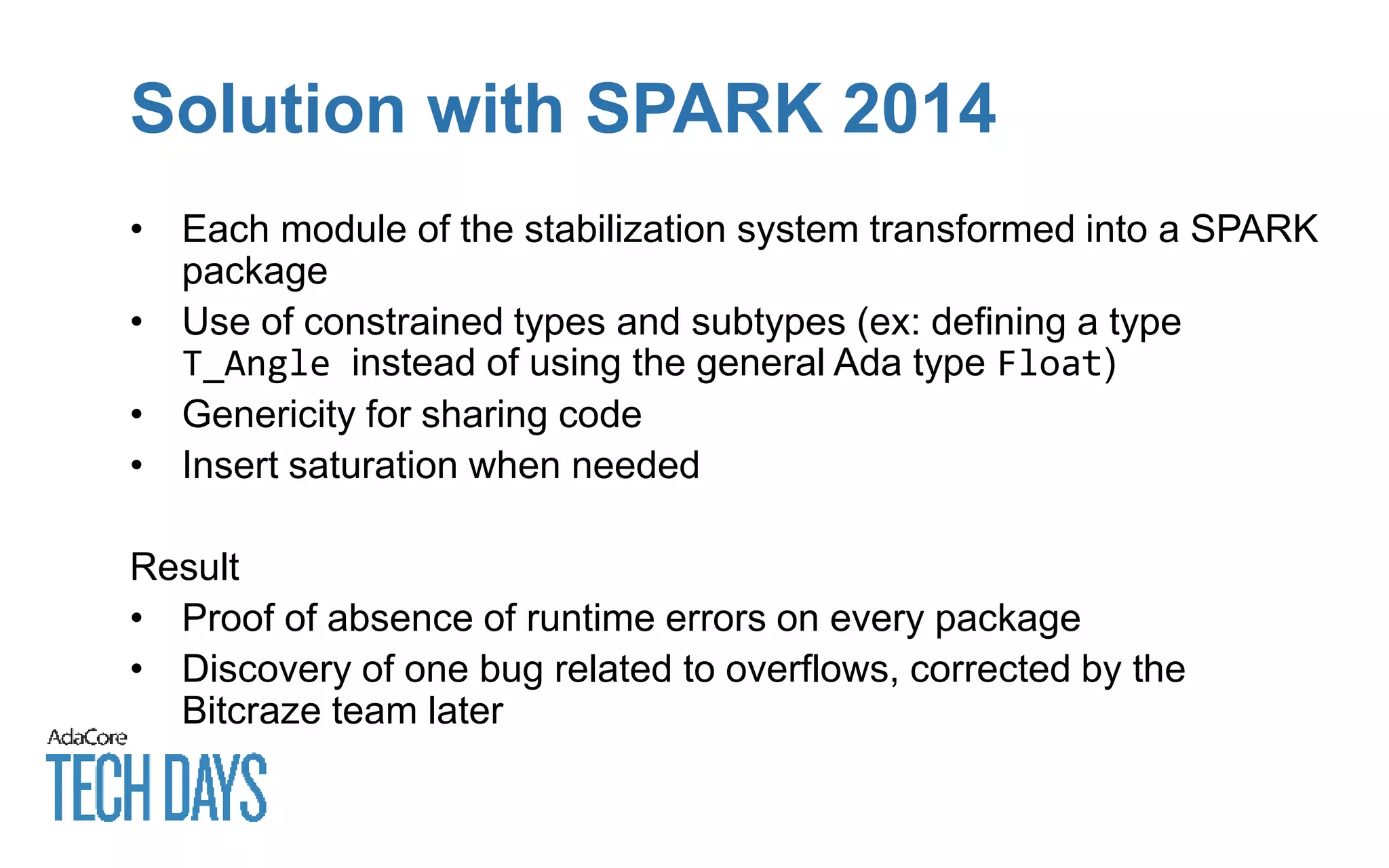
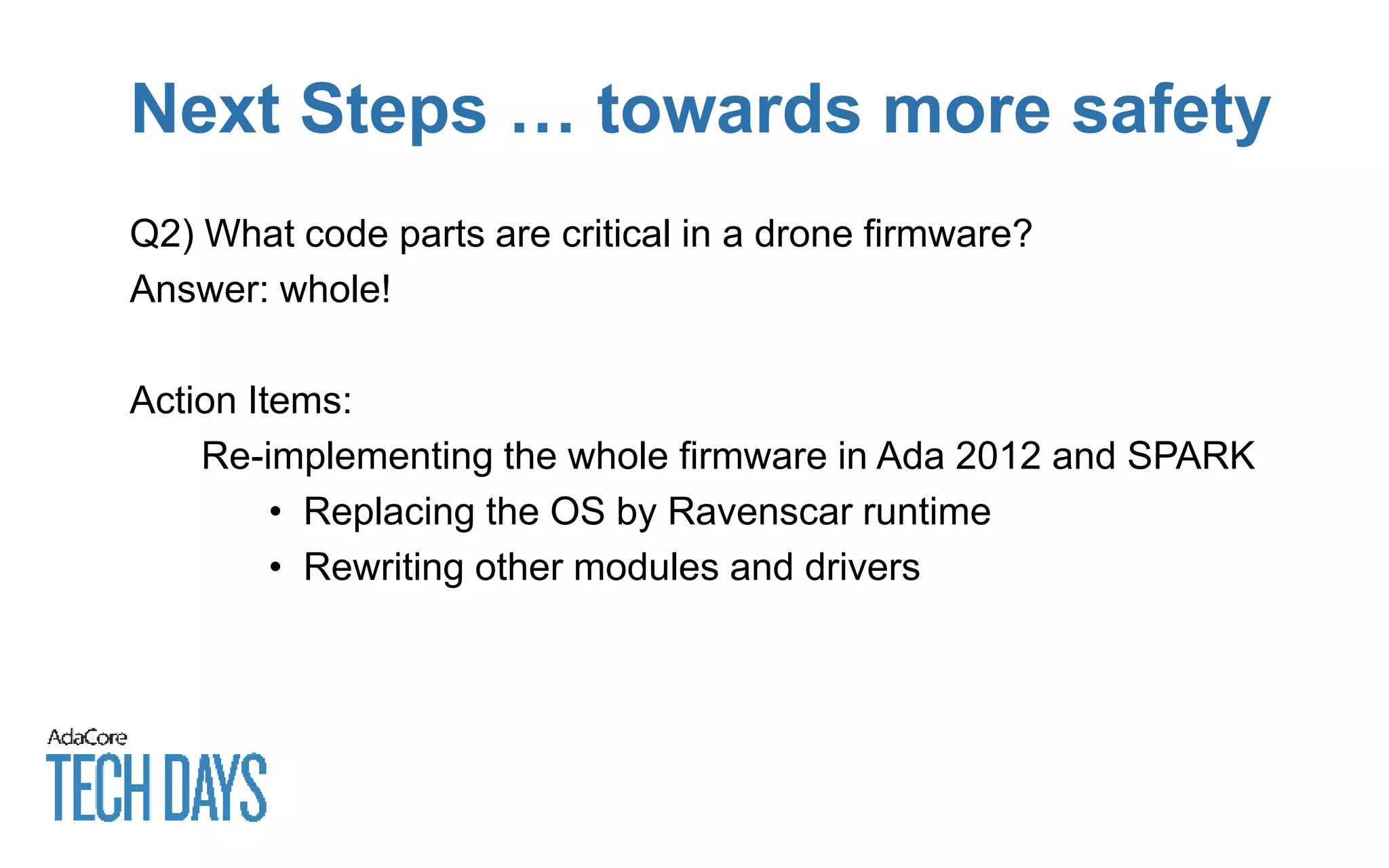
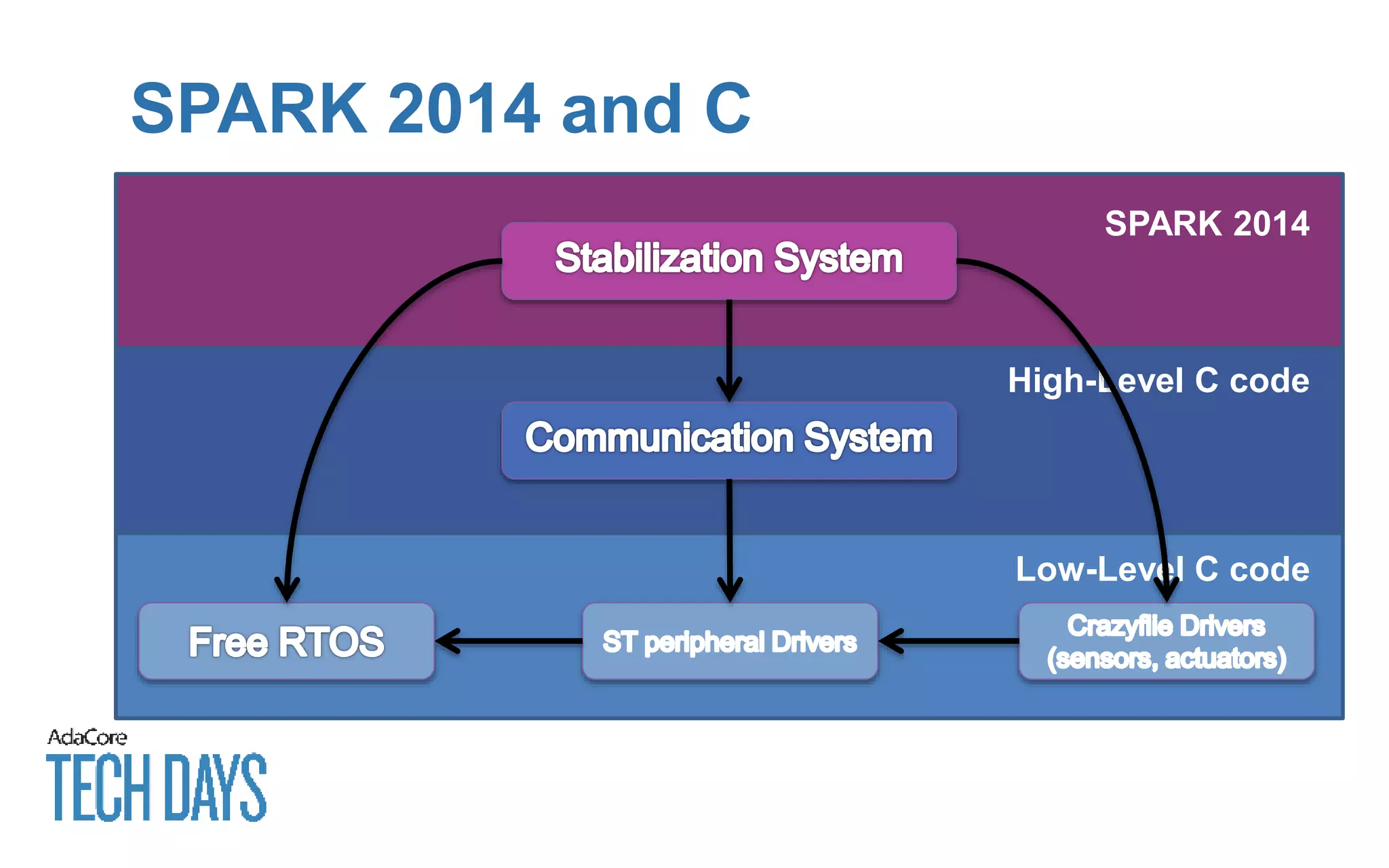
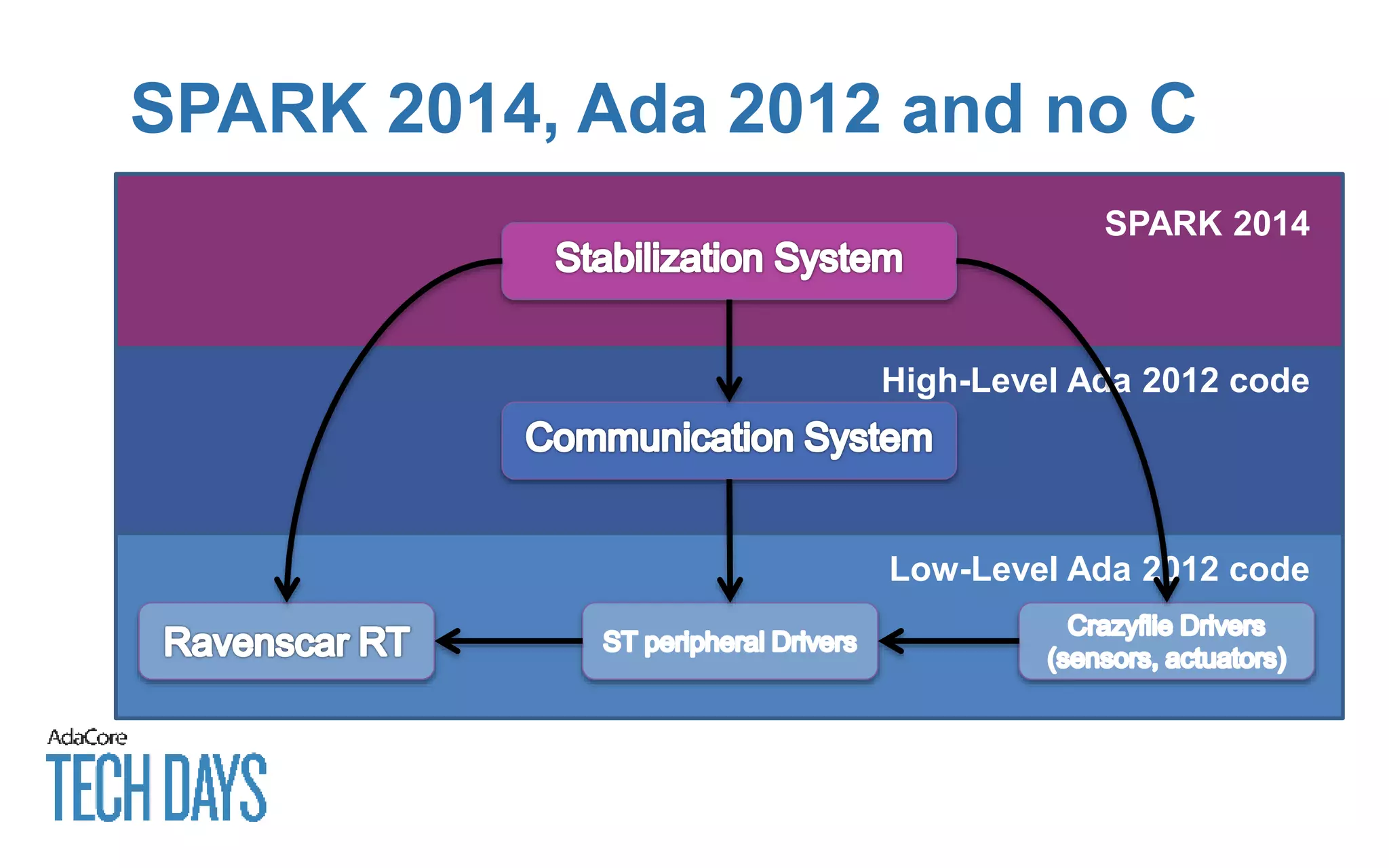
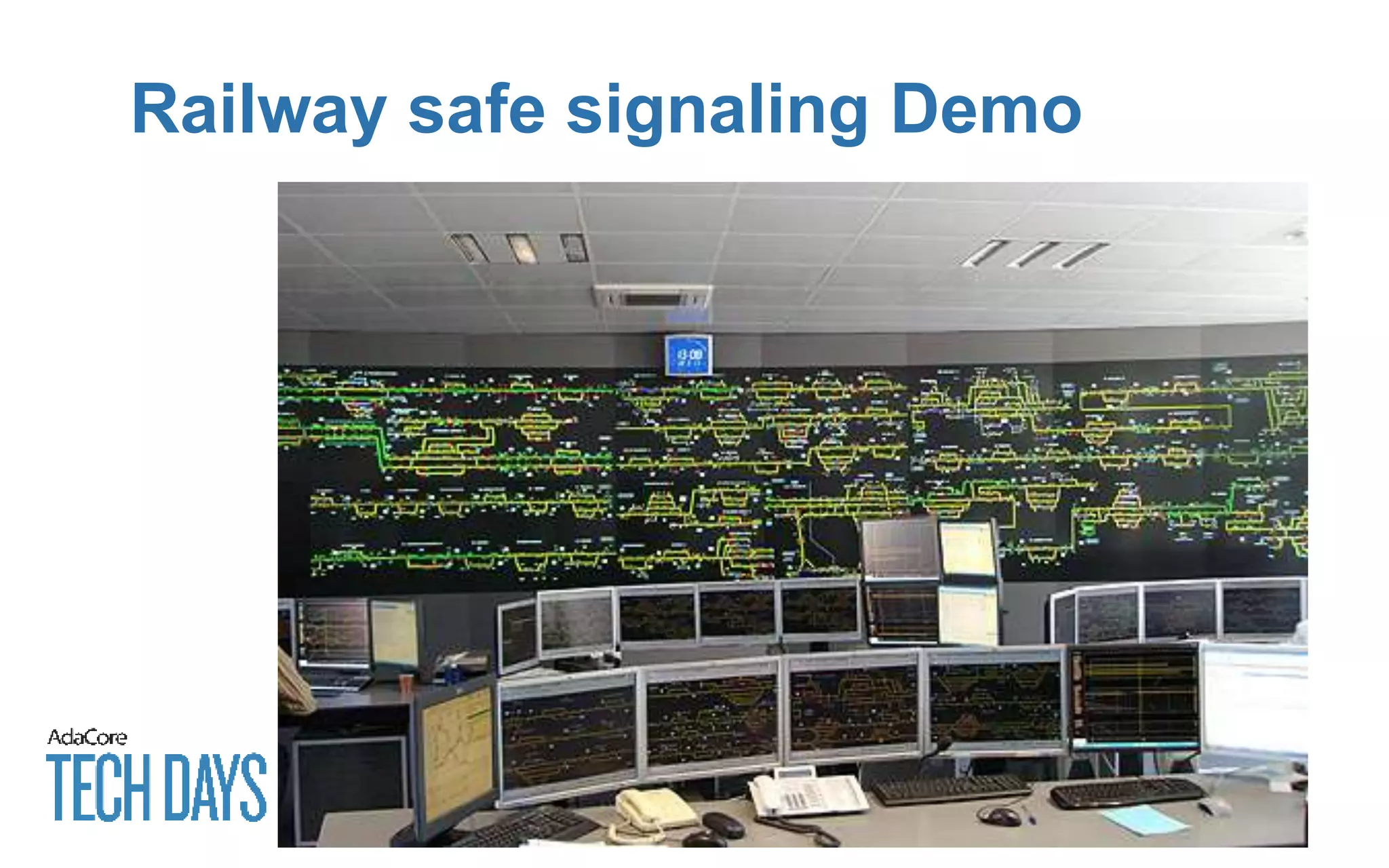
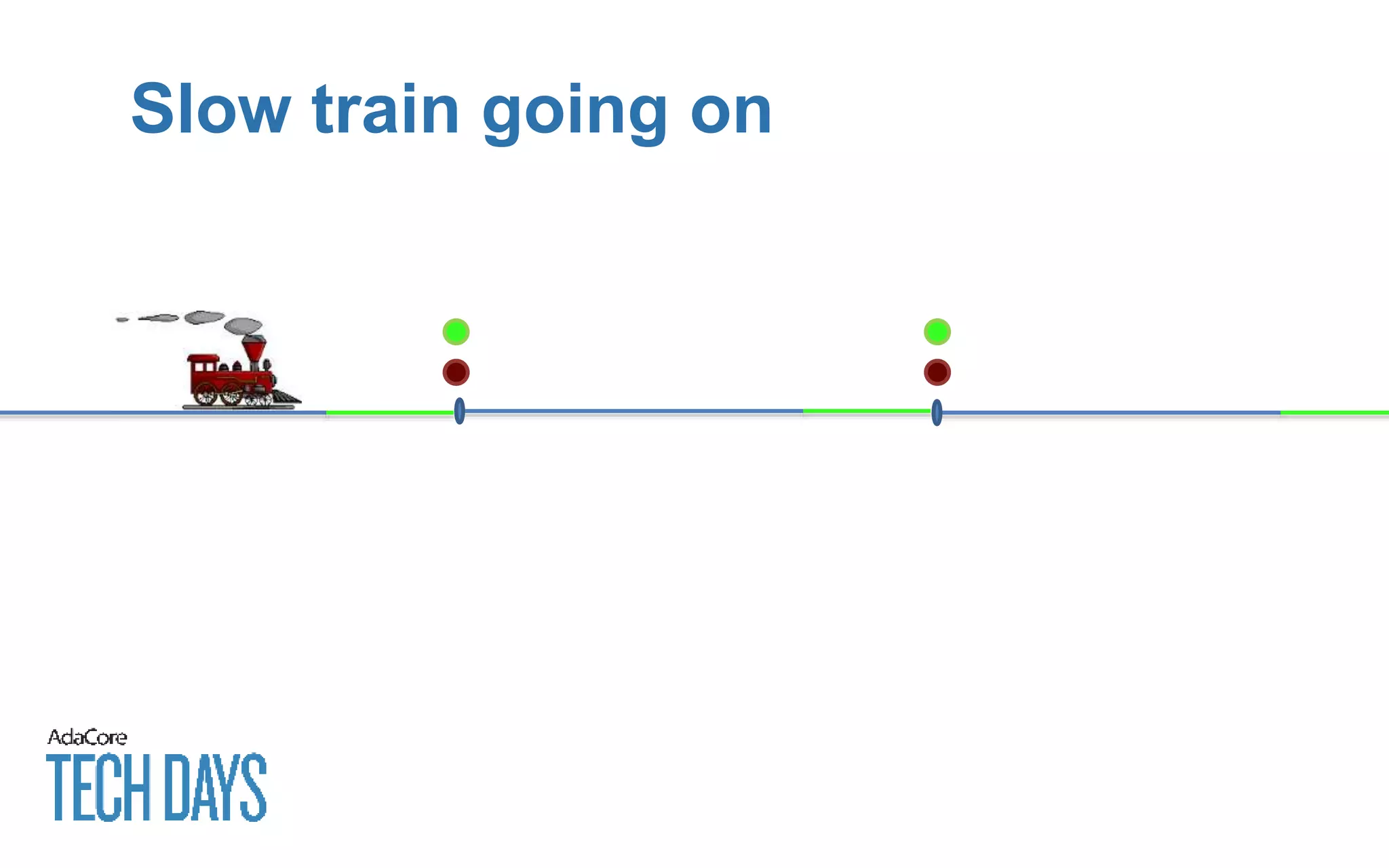
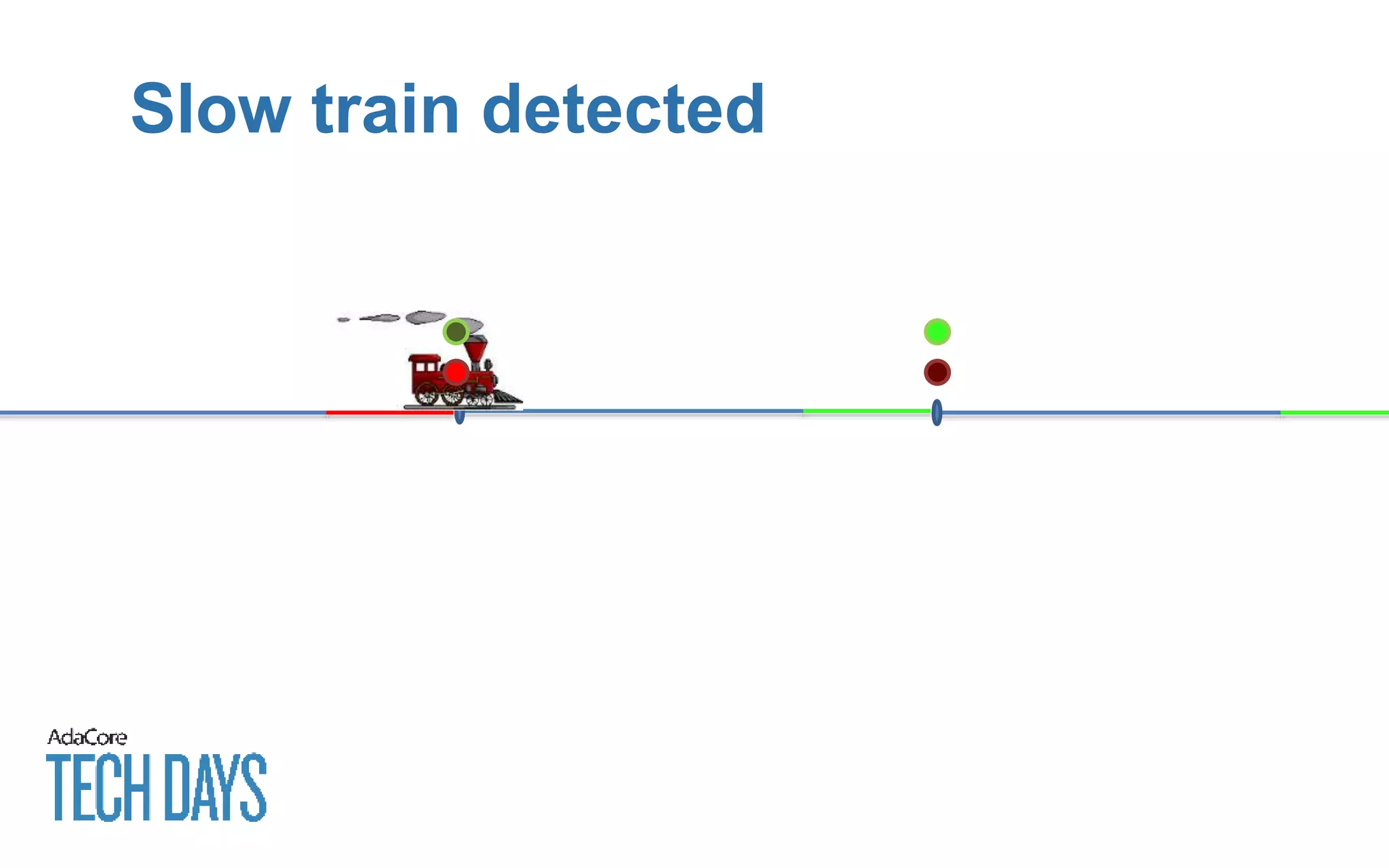

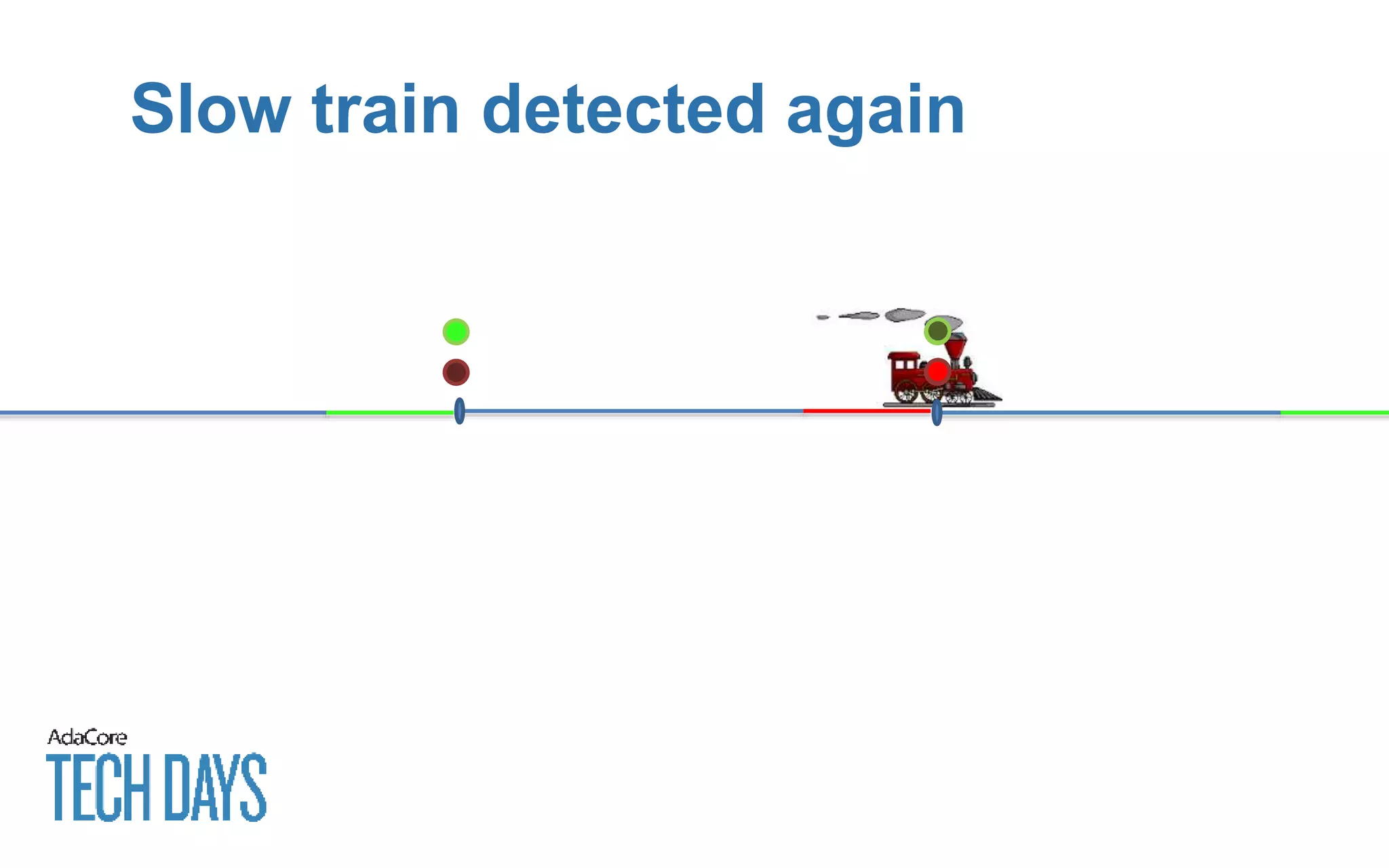
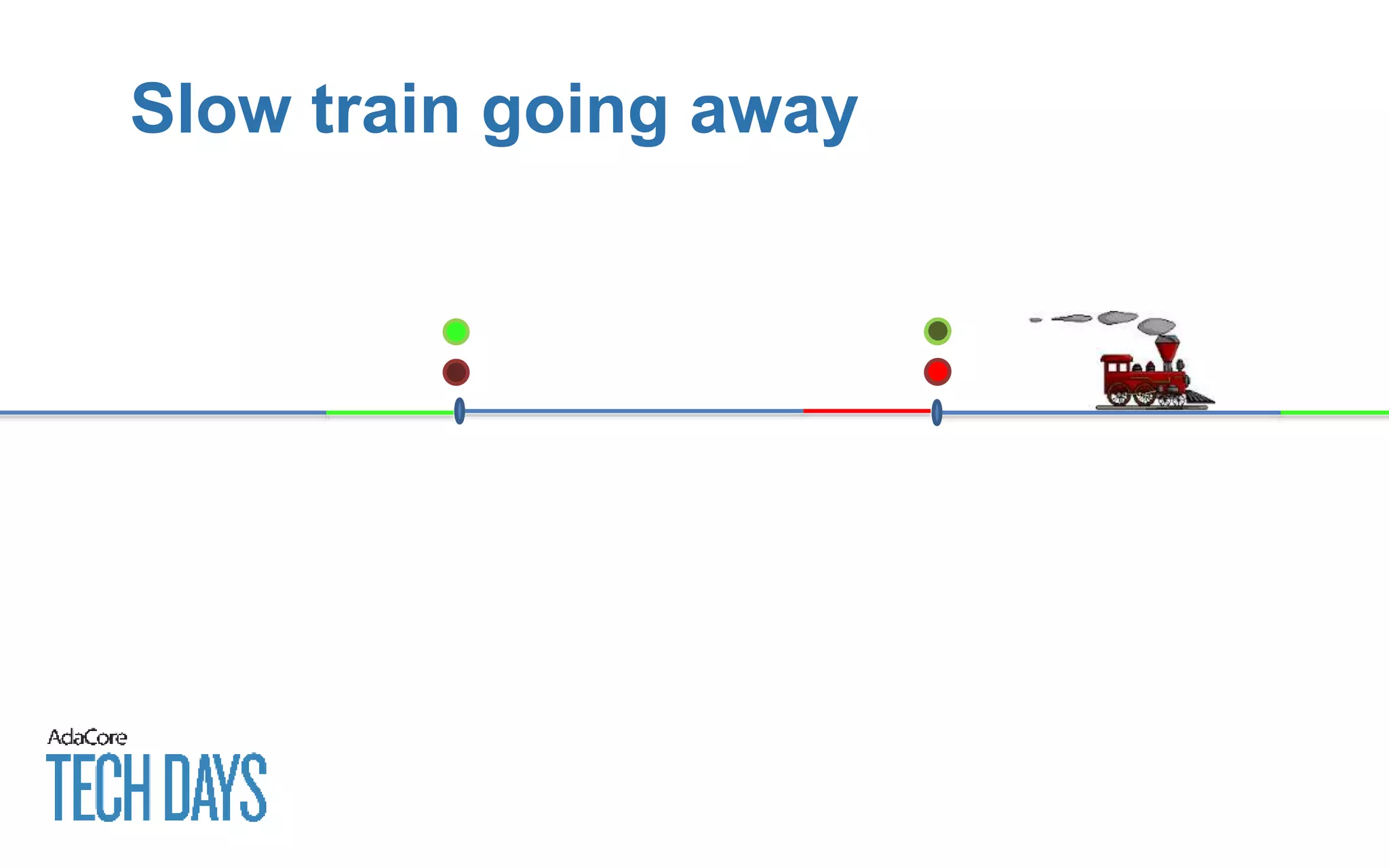
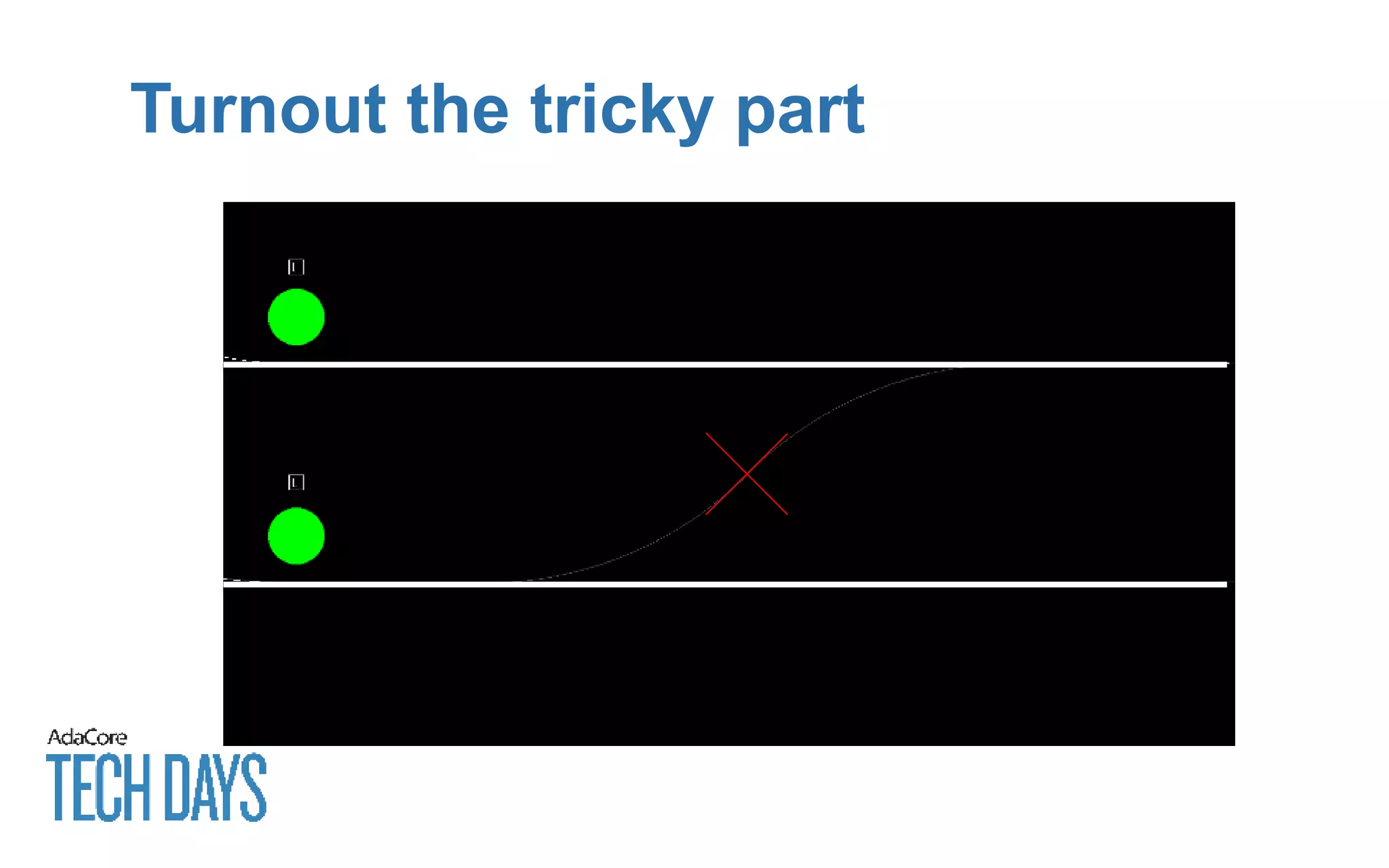
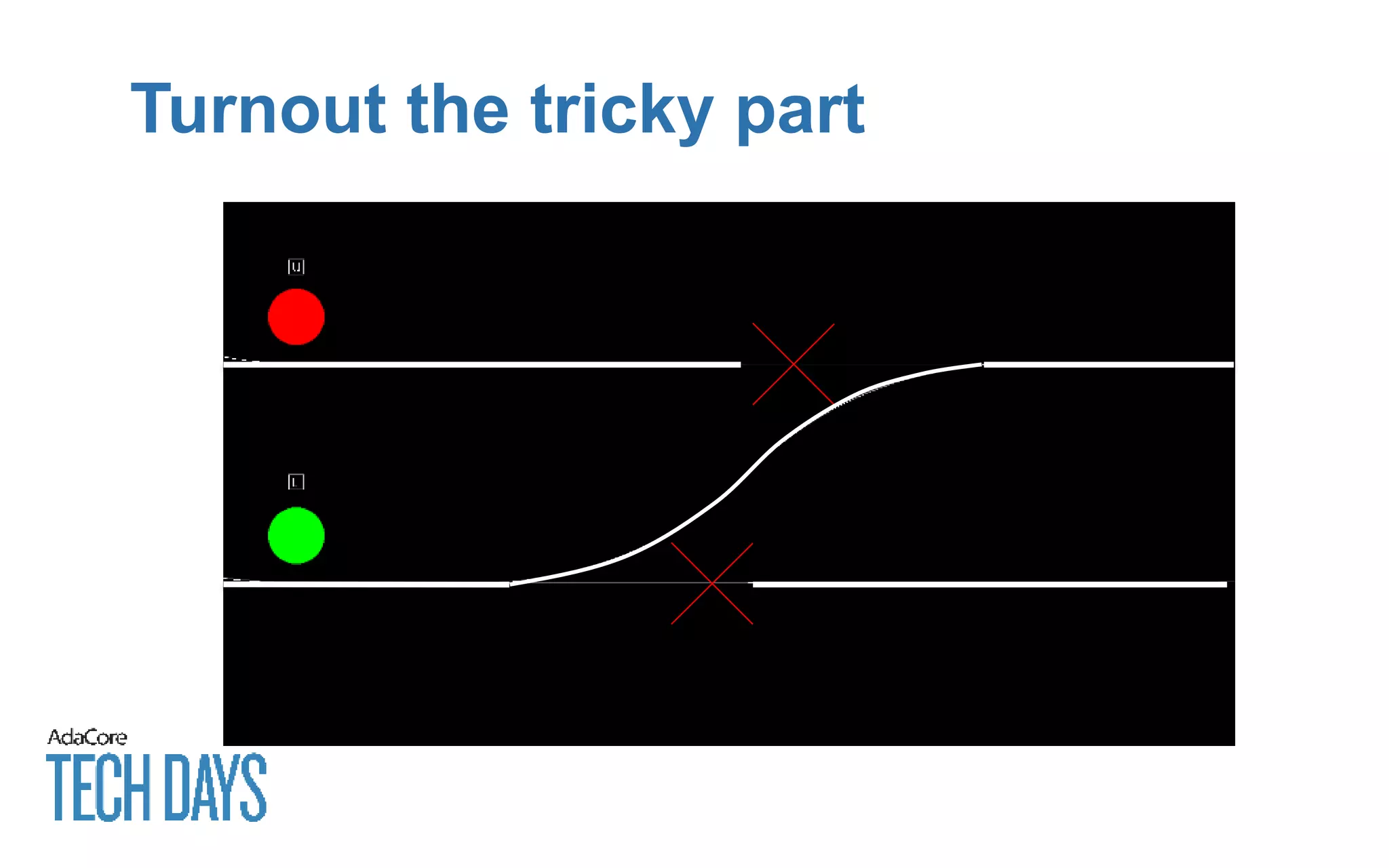
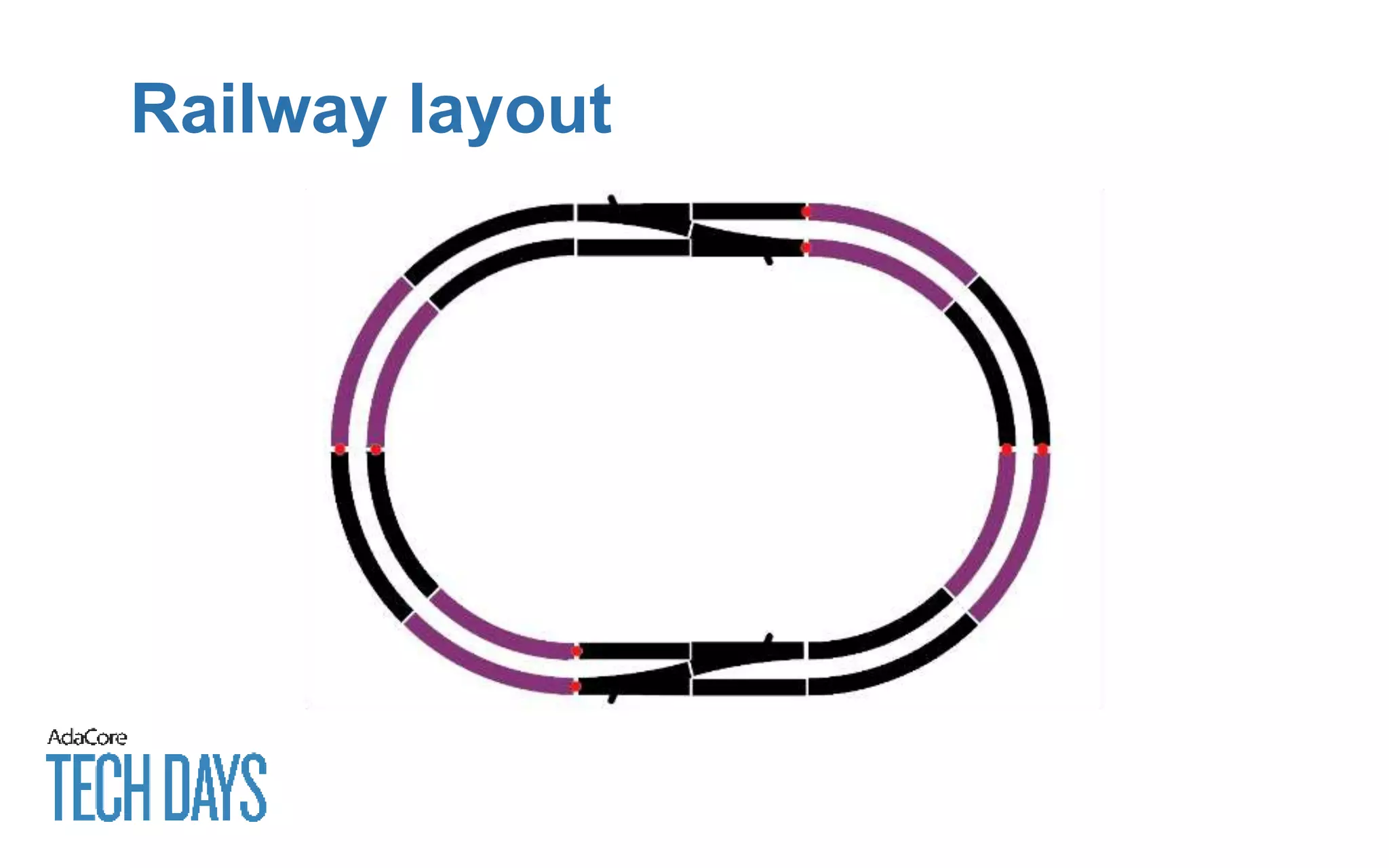
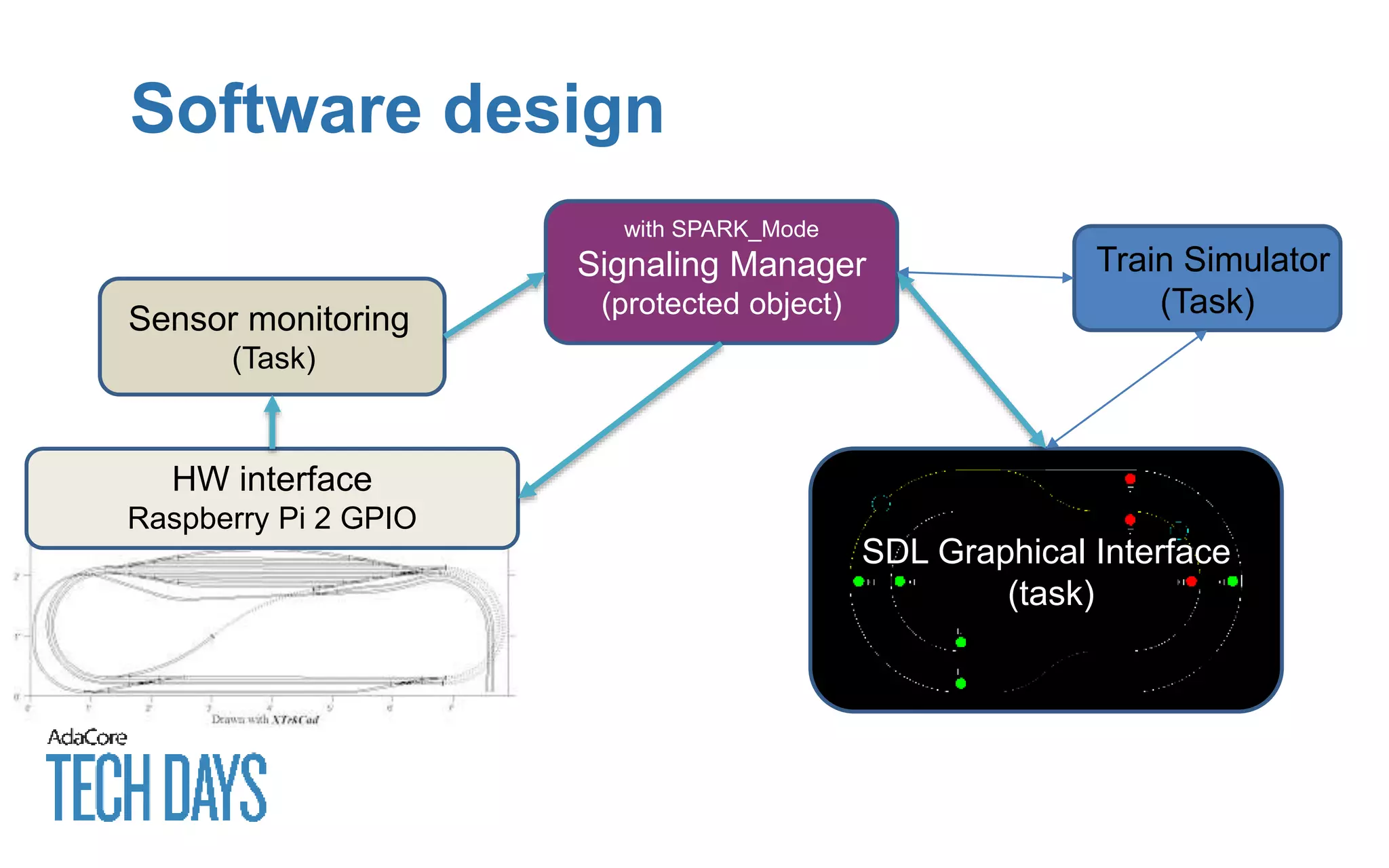
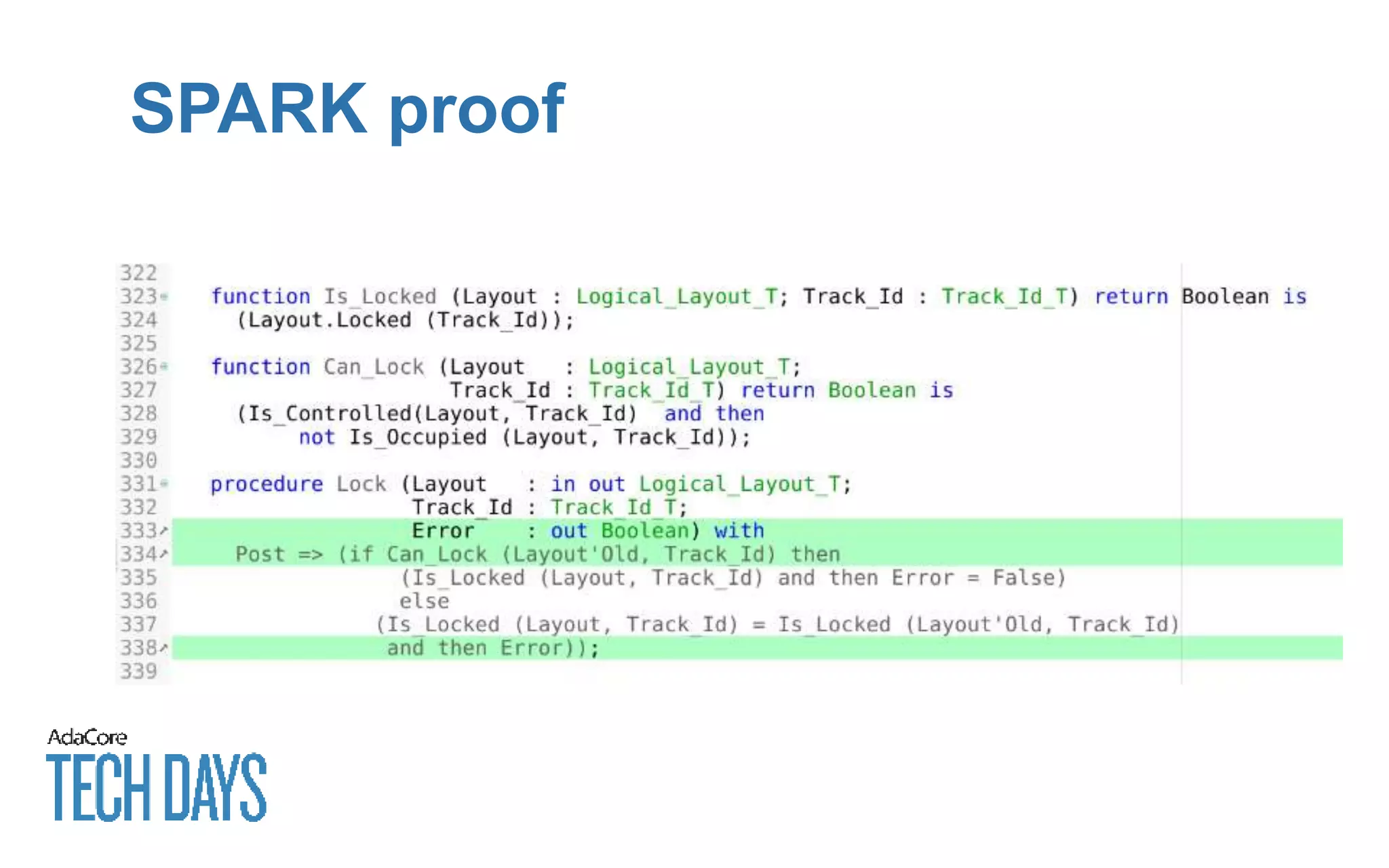

This document summarizes presentations given by Eric Perlade on using Ada 2012 and SPARK 2014 for safety-critical drone and railway signaling software. It describes reimplementing the stabilization system of the Crazyflie drone firmware in SPARK to prove absence of runtime errors. It also outlines plans to reimplement the entire drone firmware without C using Ada 2012 and SPARK. Additionally, it discusses a demonstration of using SPARK 2014 to model a railway signaling system and prove absence of collisions.