Download to read offline



















![OUT OF THE GC LAND
The main source of delays in real-time applications
like games is the Garbage Collector - we’re talking
half second freeze on recent hardware.
This means we cannot allocate memory in the game
loop - Android memory profiler tools will help you
discover and eliminate:
• Bitmap.create()
• new Array[]
• Object creations / Autoboxing](https://image.slidesharecdn.com/disaveriolippolis-161201105428/75/Hacking-for-Salone-Drone-Races-Di-Saverio-Lippolis-Codemotion-Milan-2016-25-2048.jpg)


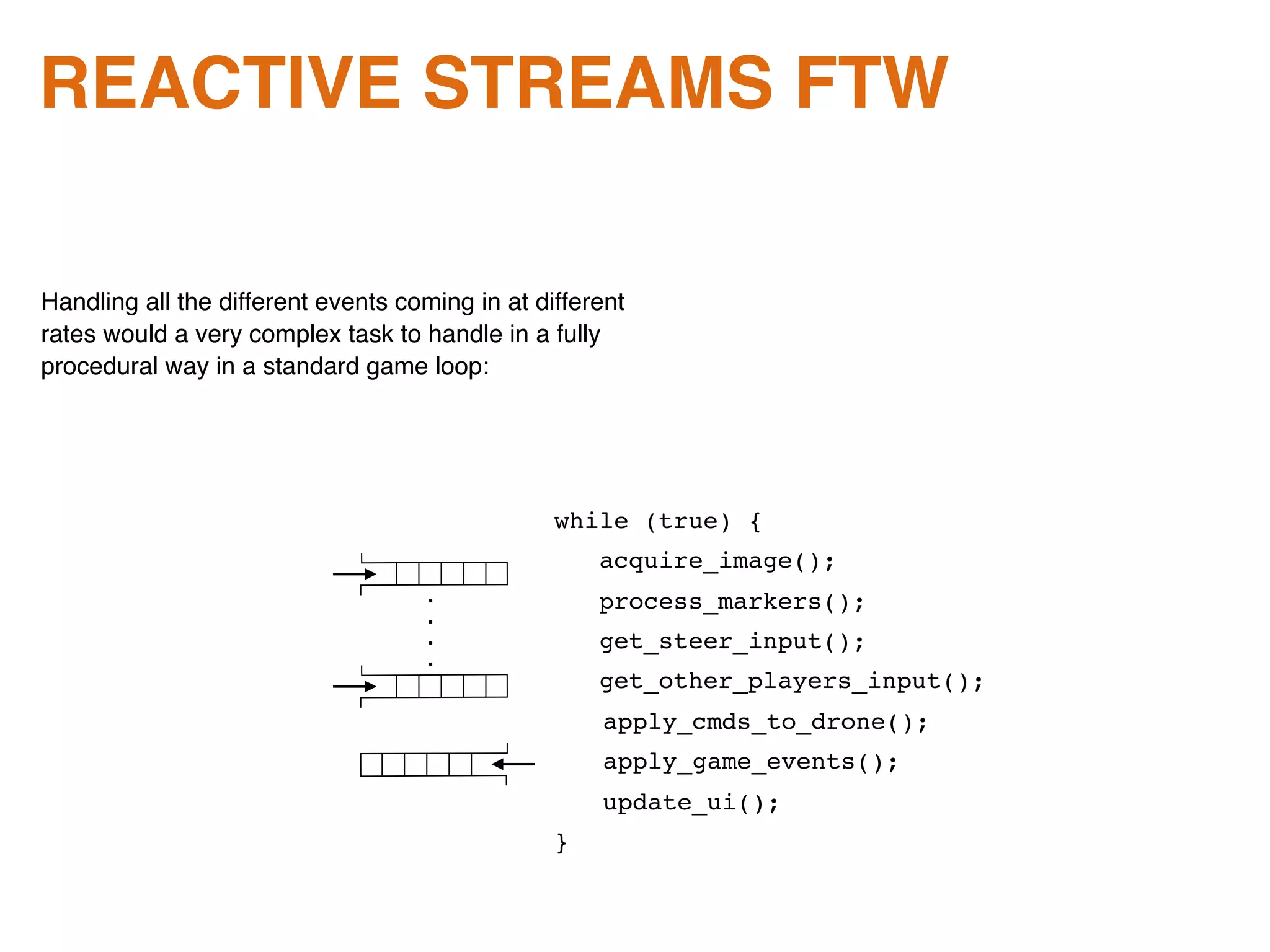







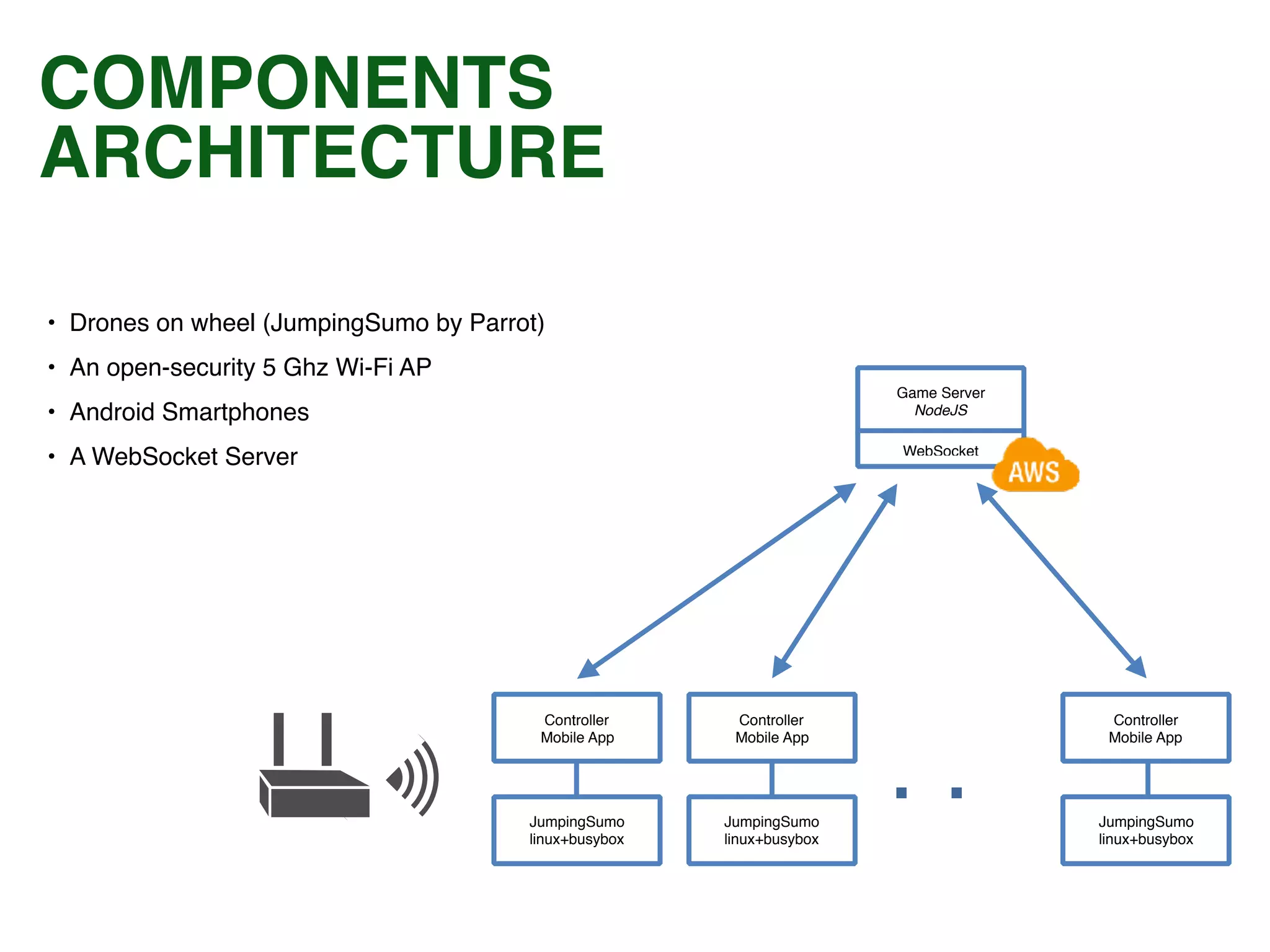
The document outlines a project involving the development of a drone racing game using various technologies including mobile applications, websockets, and image processing techniques. Key contributors Emanuele Di Saverio and Simone Lippolis discuss challenges such as hacking drone connections and optimizing performance using tools like OpenCV and Kotlin. The presentation emphasizes the need for robust image processing and efficient event handling in real-time game environments.




































![Tango[VivekKumar_CS-C_6Sem_MIT]](https://cdn.slidesharecdn.com/ss_thumbnails/5eec082a-161b-4406-a530-3c6159865bb5-160831171410-thumbnail.jpg?width=640&height=640&fit=bounds)
















































