Download as PDF, PPTX
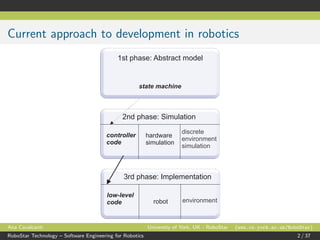
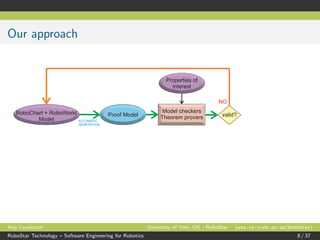
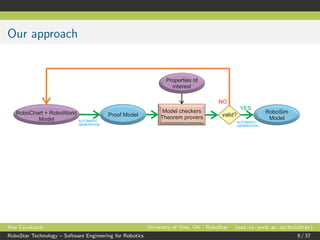






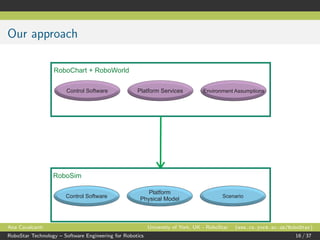
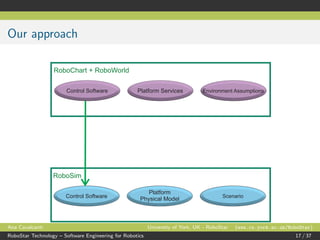

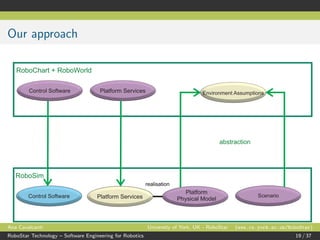
















The document describes RoboStar Technology's approach to software engineering for robotics. It involves modeling robot behavior and physical systems, automatically generating simulations from models, and testing and verifying properties through model checking and simulation. The goal is to produce certified control software for safe robotic systems through this model-driven development approach.