Download as PDF, PPTX





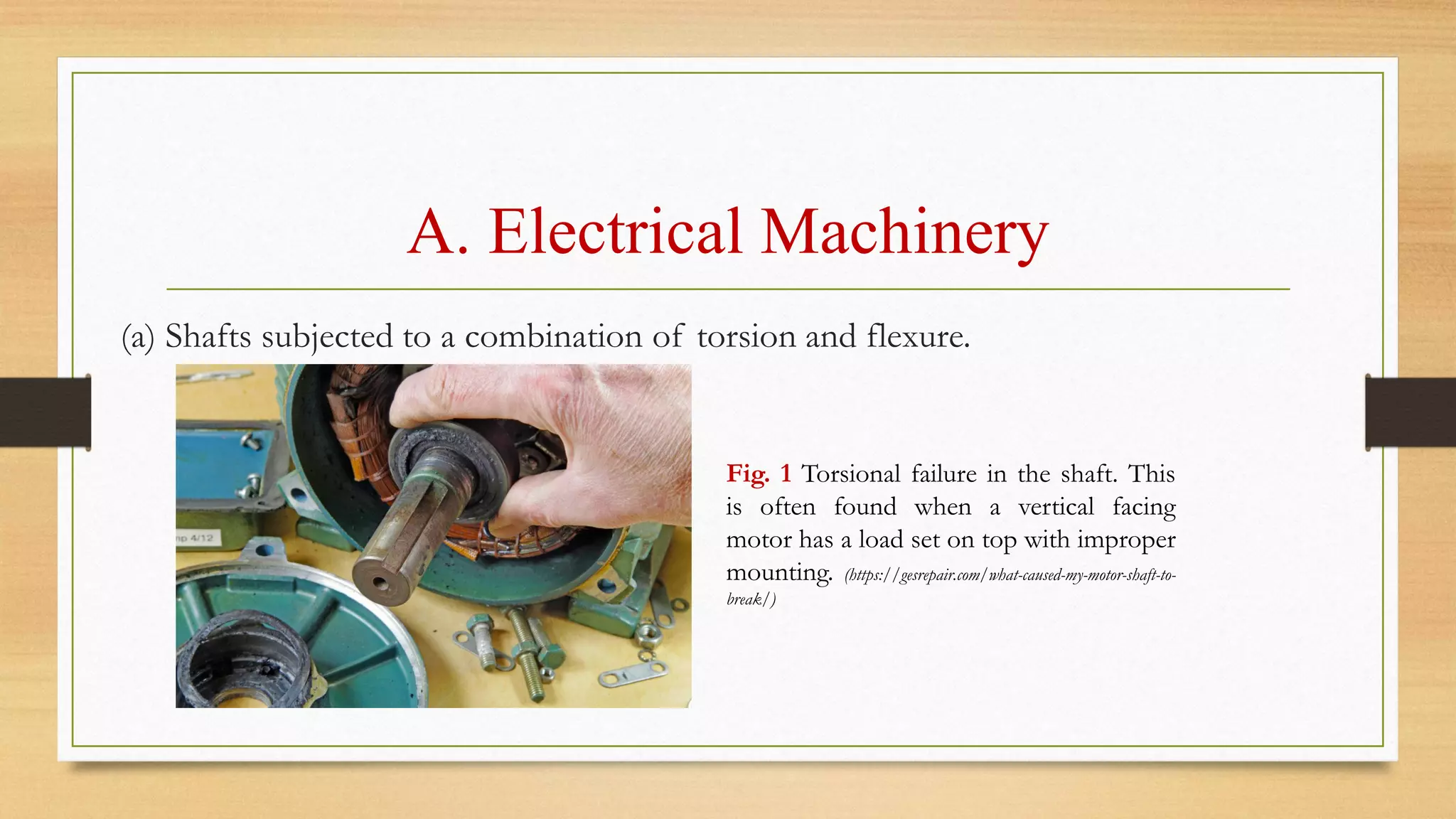
















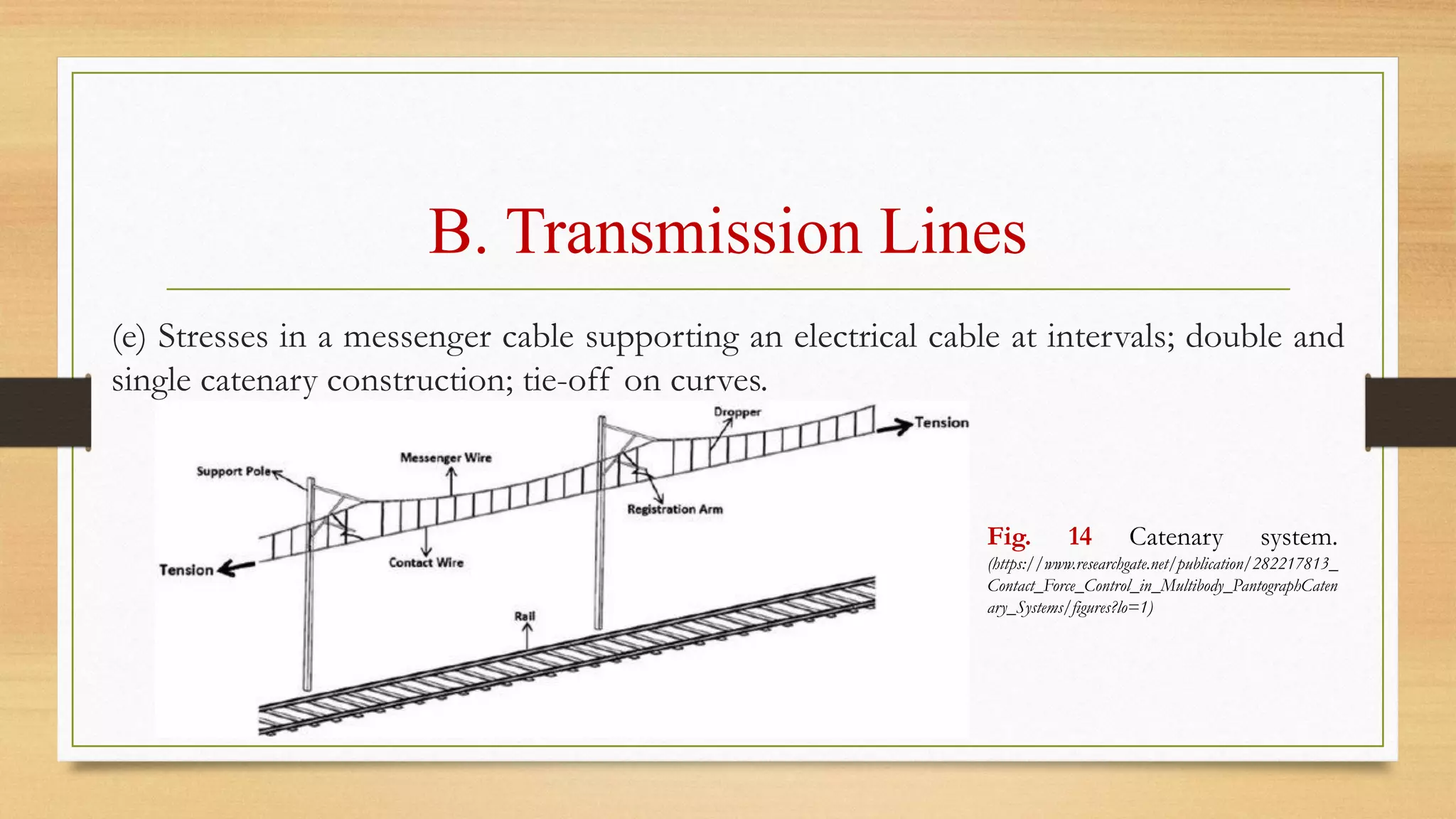












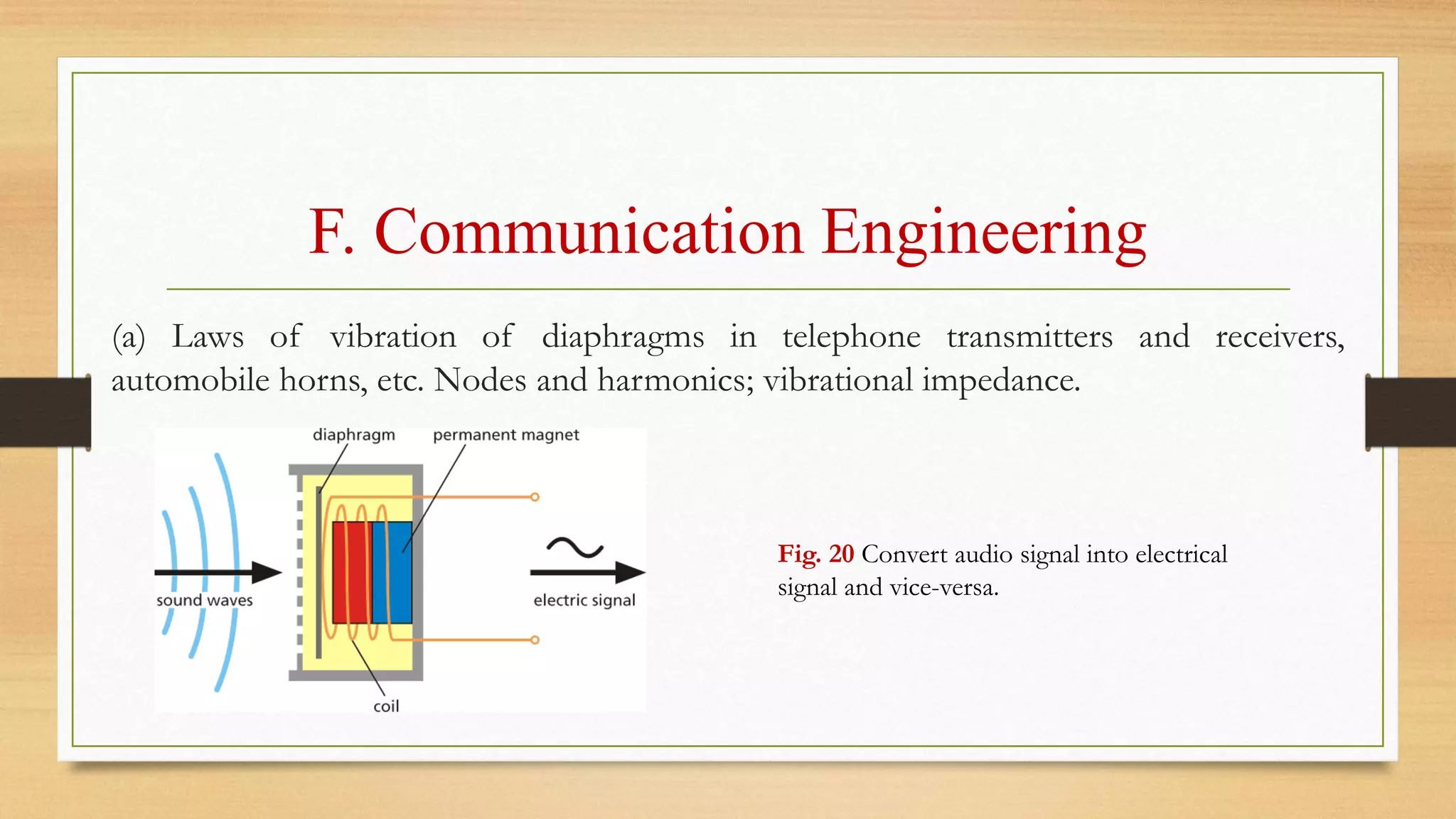

















This document provides an overview of how engineering mechanics relates to electrical engineering. It discusses how concepts from Newtonian physics and classical mechanics, such as forces, motion, and strength of materials, are applicable to electrical systems and machinery. Examples covered include stresses on motor shafts and poles, vibration analysis, transmission line design, and mechanical forces generated by magnetic fields. The document aims to illustrate how an understanding of engineering mechanics can facilitate work in various electrical domains like electrical machinery, power systems, rail transport, and communication engineering.