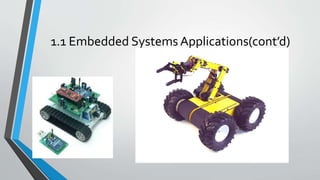
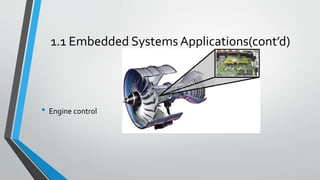
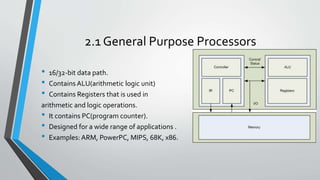
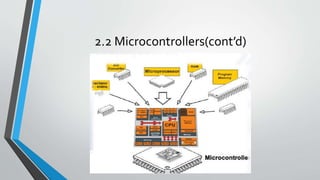
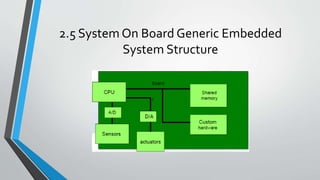
Embedded systems contain processors designed to perform dedicated functions. They tightly integrate hardware and software to perform tasks like controlling quadcopters, engines, and satellites. Embedded systems have processors unlike general purpose CPUs in PCs. They are integral parts of larger systems. Microcontrollers are commonly used embedded systems that integrate a processor, memory, and I/O on a single chip. They include peripherals like timers, analog-to-digital converters, and communication protocols. The microcontroller acts as the brain that processes instructions from memory and transfers data through buses to peripherals and memory to control inputs and outputs.