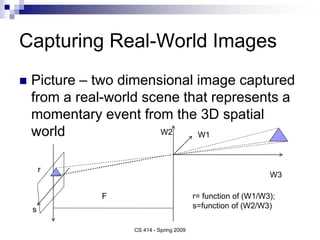
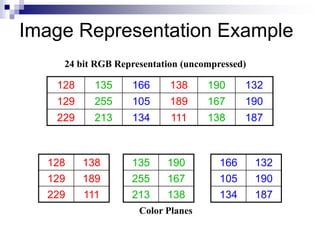
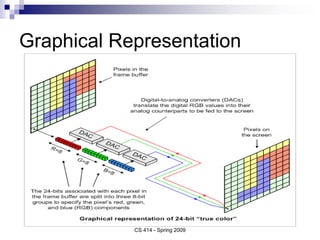
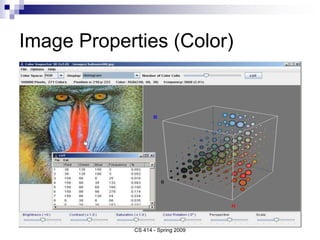
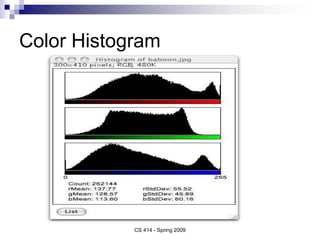
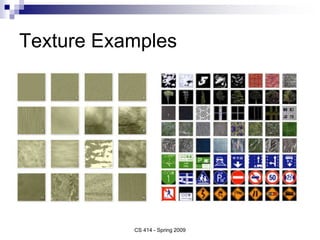
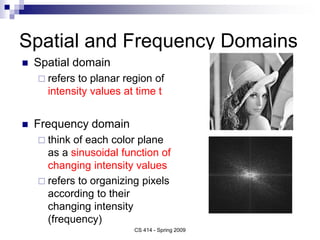
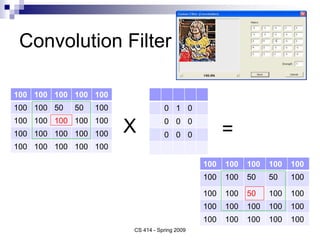
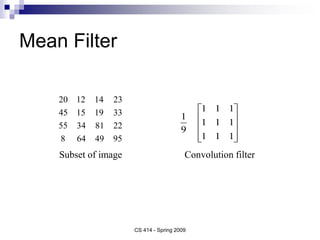
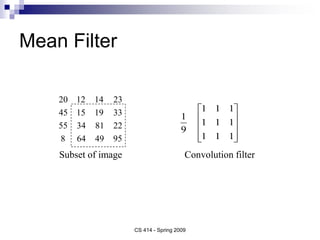
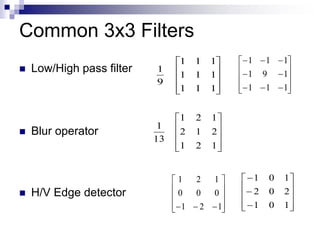
This document discusses digital image representation and processing. It begins with an overview of capturing and representing real-world images digitally using pixels and color planes. Common image file formats and properties like color and texture are also covered. The document then describes two important image processing functions - filtering using convolution and edge detection using gradient and thresholding calculations. It concludes with a brief list of other common image processing techniques.