Download as PDF, PPTX
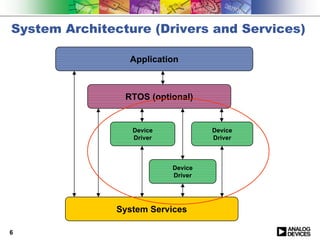
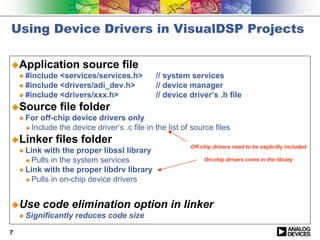
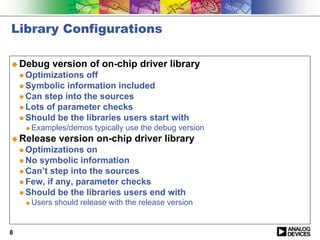
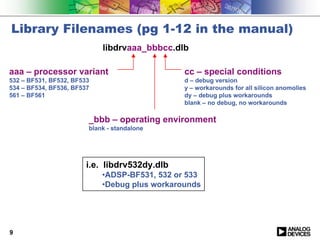
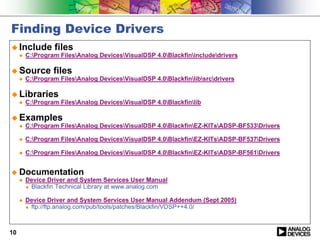
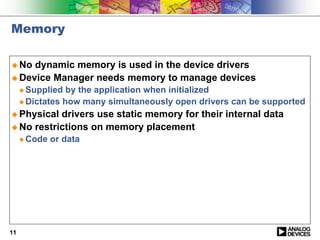
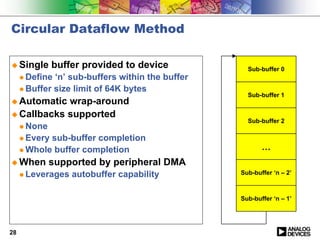
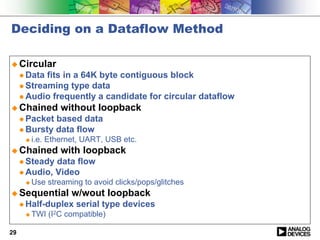
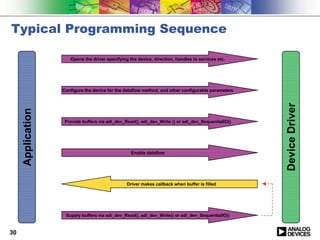
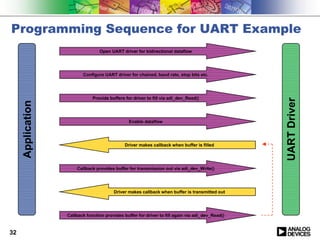

The document discusses Blackfin device drivers and provides an overview of the device driver model for Blackfin processors. It describes the common API, dataflow methods, and initialization process. An example UART driver application is presented to demonstrate usage of the driver API and chained dataflow method.


















































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)


