Downloaded 24 times



![16
Augment Training Images
imageAugmenter = imageDataAugmenter('RandRotation',[-180 180])
Rotation
Reflection
Scaling
Shearing
Translation
Colour pre-processing
Resize / Random crop / Centre crop](https://image.slidesharecdn.com/deeplearningmatlabaidevdays-180312065914/85/Developing-and-Deploying-Deep-Learning-Based-Computer-Vision-Systems-Alka-Nair-MathWorks-16-320.jpg)
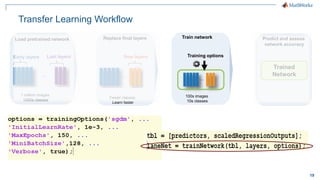
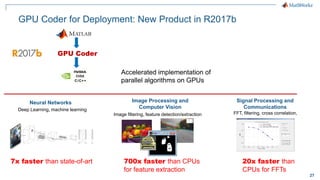
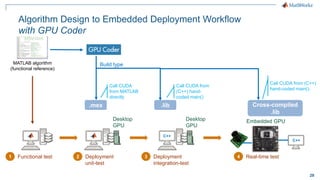

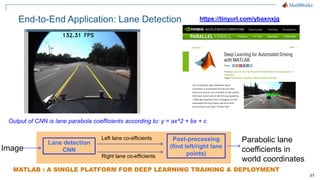
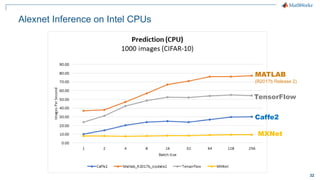
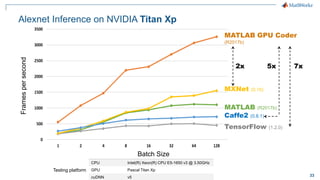
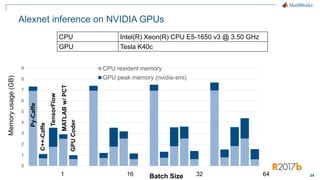
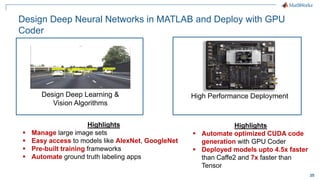

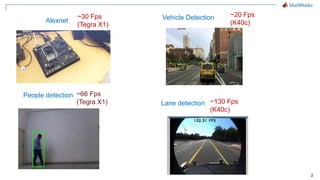
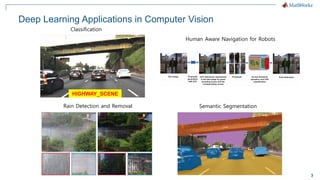
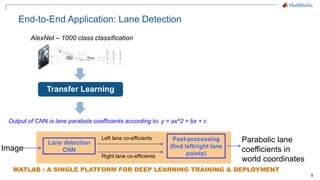
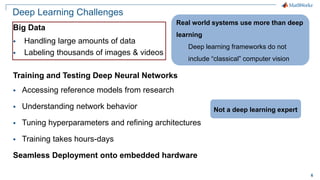
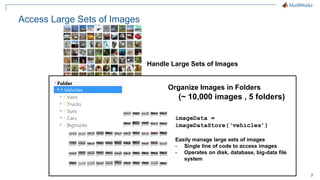
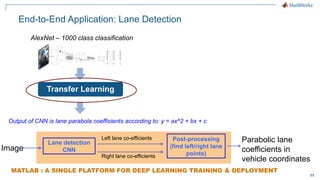
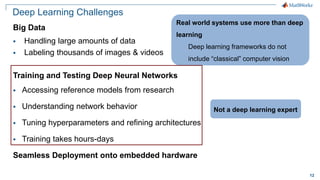
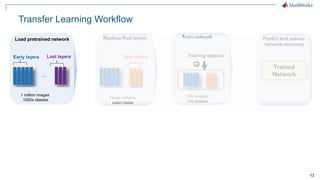
The document discusses the development and deployment of deep learning-based computer vision systems, focusing on applications like lane detection using platforms such as MATLAB and various neural network architectures like AlexNet. It outlines challenges in handling large datasets, the importance of transfer learning, and the acceleration of training and deployment through GPU coding. Additionally, it emphasizes the capacity for real-time applications and the seamless integration of deep learning with classical computer vision methods.