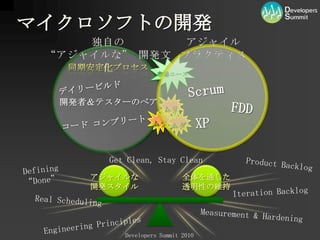
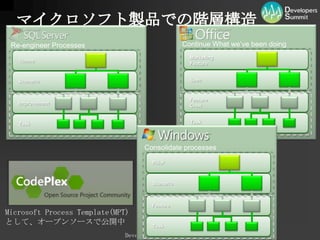
マイクロソフト製品での階層構造Continue What we’vebeen doingRe-engineerProcessesMarketingFeaturePillarThemeScenarioSpecScenarioFeatureCrewImprovementFeatureConsolidate processesTaskTaskTaskMicrosoftProcessTemplate(MPT)として、オープンソースで公開中
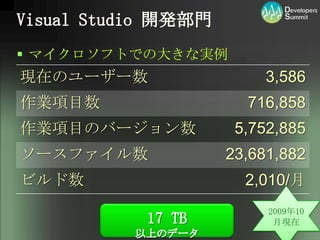
マイクロソフトにおける TFS 実績Rawデータ>..31 TFS インスタンス..VS 2008 in use since ‘05 ..VS 2010 in use since ‘072つの主要な利用目的>Dogfood * 製品開発* Dogfood: n. [Microsoft, Netscape] Interim software used internally for testing. "To eat one's own dogfood“… means to use the software one is developing, as part of one's everyday development environment… Developers… using their own software will quickly learn what's missing or broken.
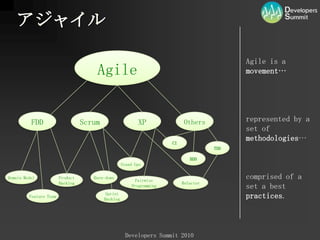
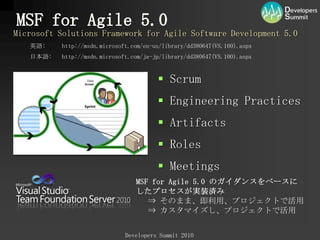
アジャイルAgileAgile is amovement…represented by a set of methodologies…comprised of a set a best practices.ScrumXPFDDOthersCITDDBDDStandUpsBurn-downDomain ModelProductBacklogRefactorPairwiseProgrammingSprintBacklogFeature Team
46.
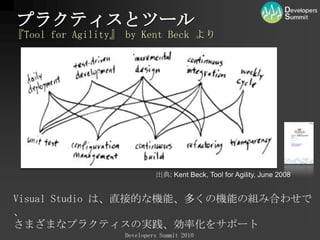
プラクティスとツール『Tool for Agility』by Kent Beck より出典:Kent Beck, Tool for Agility, June 2008VisualStudio は、直接的な機能、多くの機能の組み合わせで、さまざまなプラクティスの実践、効率化をサポート
47.
今度の予測『Toolfor Agility』 byKent Beck今後のツール活用への期待作業間のスムーズな移行自動テストの対象の拡大透明性リアルタイムの共同作業出典:Kent Beck, Tool for Agility, June 2008








![マイクロソフトにおける TFS 実績Raw データ>..31 TFS インスタンス..VS 2008 in use since ‘05 ..VS 2010 in use since ‘072つの主要な利用目的>Dogfood * 製品開発* Dogfood: n. [Microsoft, Netscape] Interim software used internally for testing. "To eat one's own dogfood“… means to use the software one is developing, as part of one's everyday development environment… Developers… using their own software will quickly learn what's missing or broken.](https://image.slidesharecdn.com/devsumi2-100221094627-phpapp02/85/2010-19-320.jpg)
















































































![DevOps時代の開発環境と現場体験 [#cmdevio2015]](https://cdn.slidesharecdn.com/ss_thumbnails/cmdevio2015a-4-150329003710-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)