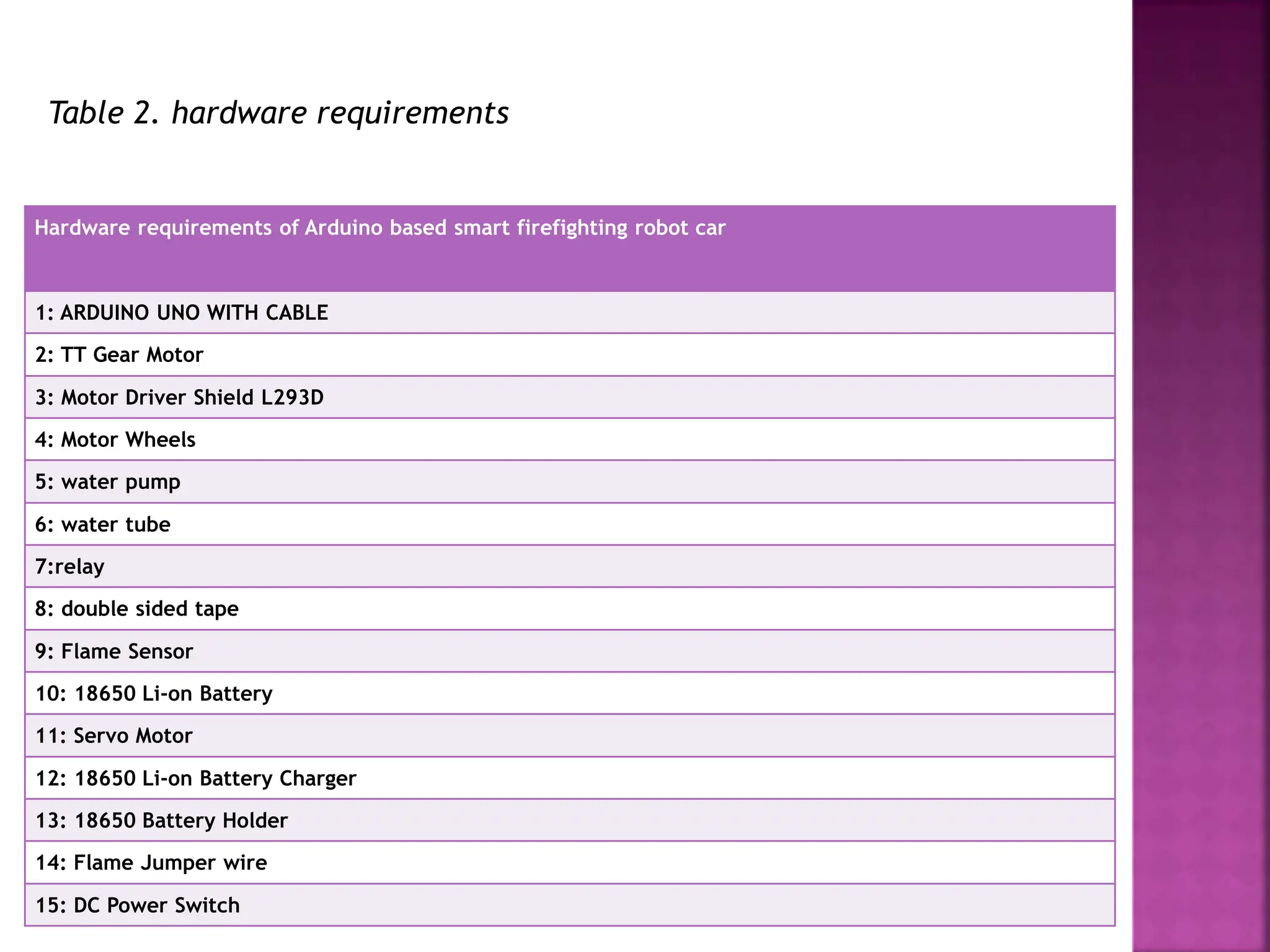
The document outlines the design and development of an Arduino-based smart firefighting robot aimed at assisting firefighters in hazardous situations where human intervention is risky. It highlights the robot's capabilities, including fire detection and extinguishing using flame sensors and a water jet system, which aims to reduce the economic and human losses associated with fires. The project is intended for implementation in Mogadishu, Somalia, with completion expected between October 2023 and July 2024.






























![ROS FFR PPT [1].pptxROS FFR PPTROS FFR PPT](https://cdn.slidesharecdn.com/ss_thumbnails/rosffrppt1-251008175331-d7461e45-thumbnail.jpg?width=640&height=640&fit=bounds)






















