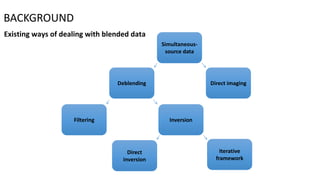
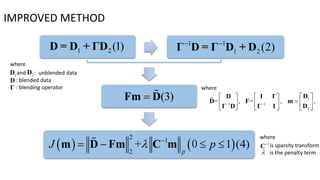
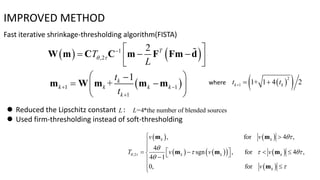
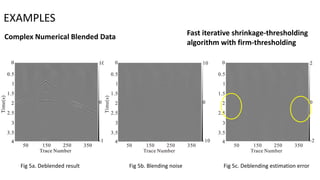
1) The document presents an improved method for deblended simultaneous-source seismic data using a fast iterative shrinkage-thresholding algorithm with firm-thresholding.
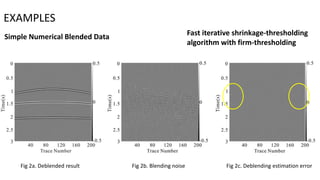
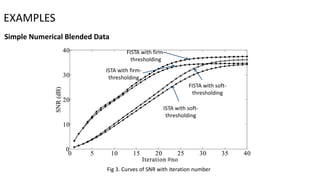
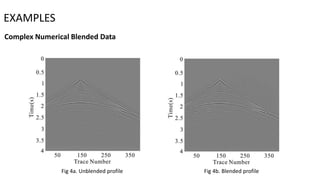
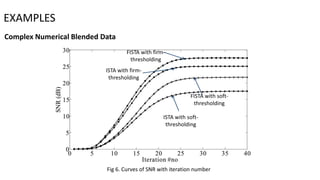
2) Numerical examples on both simple and complex blended data models show the new method achieves better signal-to-noise ratio and estimation accuracy compared to other methods.
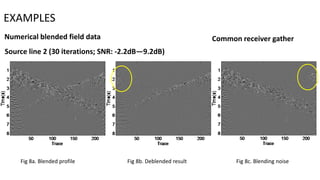
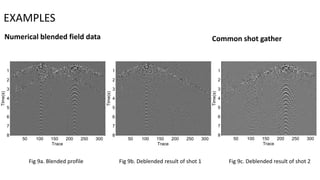
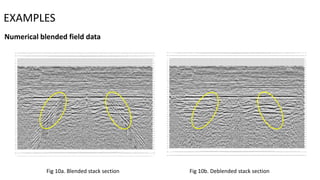
3) The method is also tested on numerical blended field data with common receiver gathers and common shot gathers, demonstrating noise removal and improved deblended stack sections.