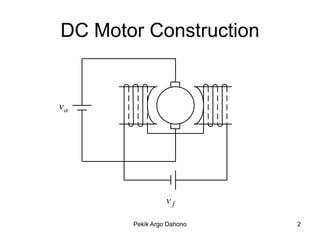
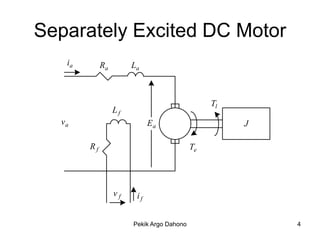
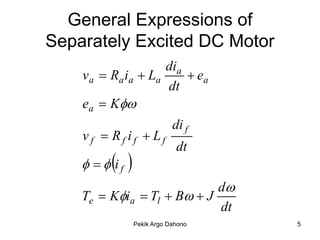
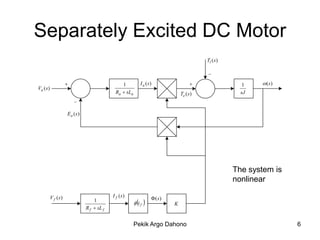
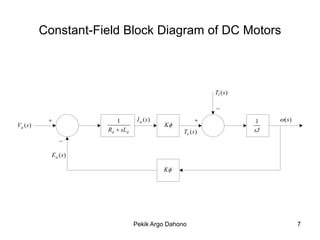
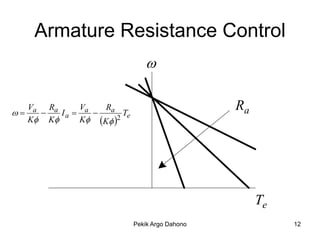
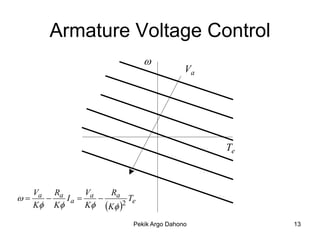
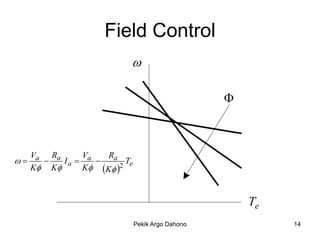
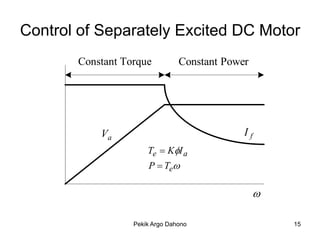

This document discusses the characteristics and operation of DC motors. It describes the construction and components of DC motors, including that the armature is usually located on the rotor and the field is on the stator. It also discusses separately excited DC motors and series DC motors, how their speed and torque can be controlled, and their applications.