Downloaded 67 times








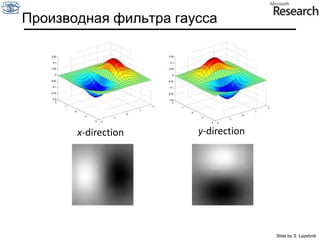


![Производная фильтра гаусса* [1 -1] = Slide by S. Lazebnik](https://image.slidesharecdn.com/cv201103basicanalysis-110629033445-phpapp02/85/CV2011-Lecture-3-Basic-image-analysis-40-320.jpg)
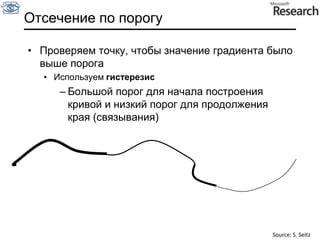
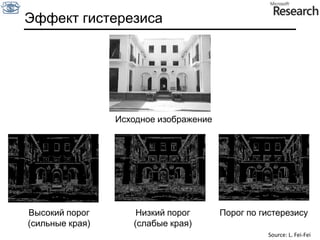
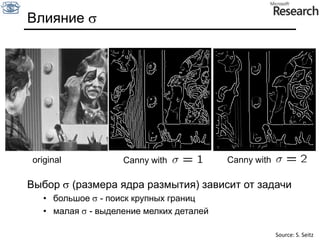
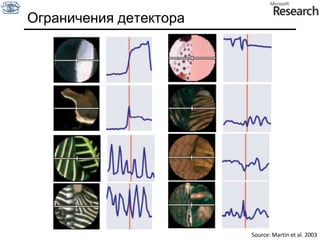
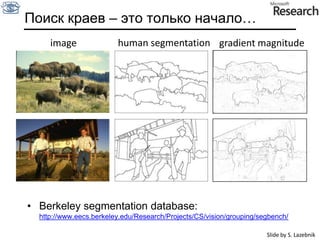



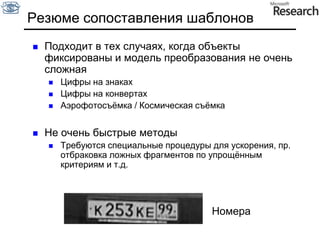
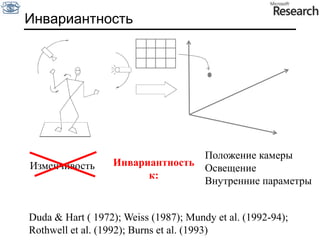
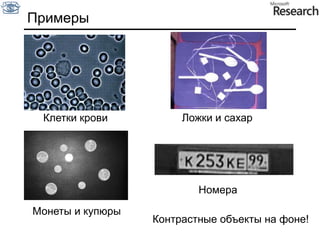
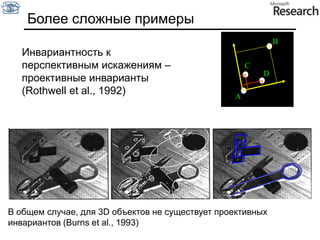
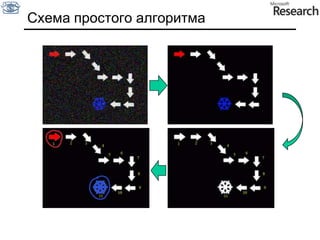


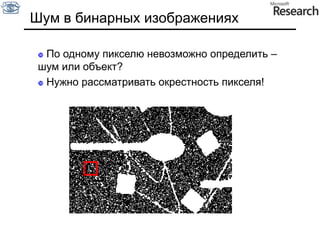
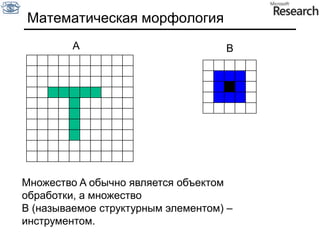
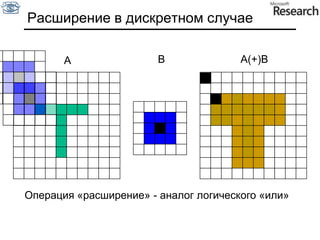
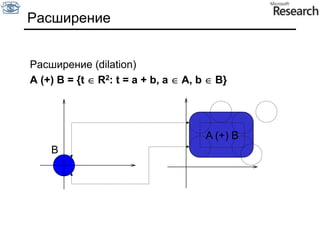
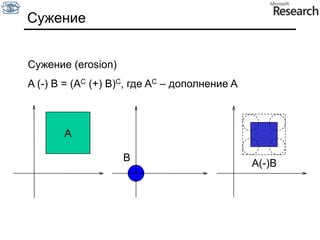
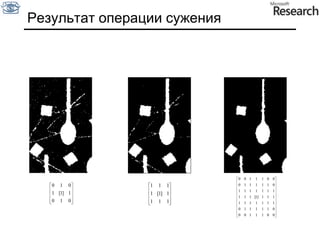
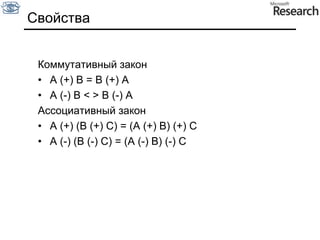



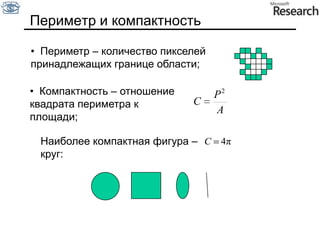
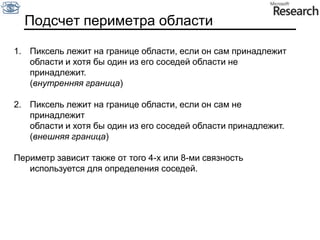
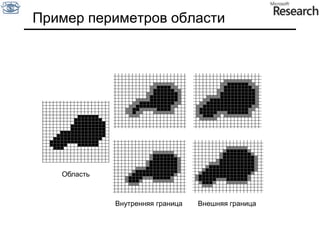
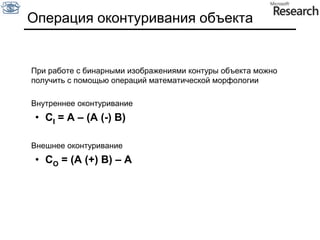

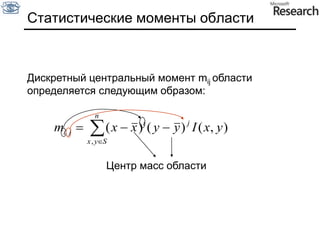
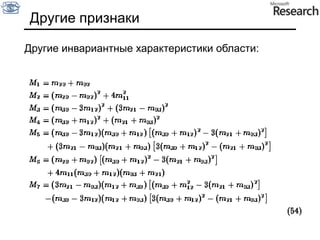
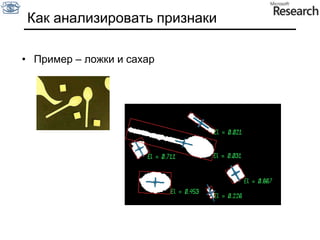

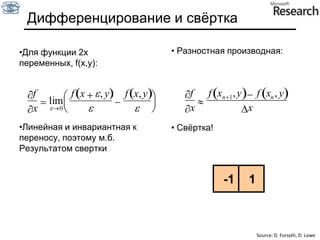
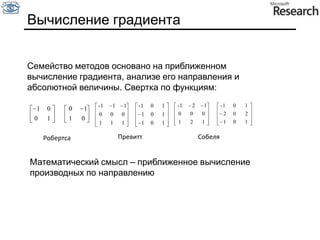
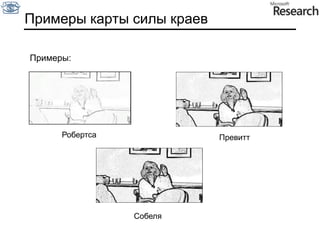
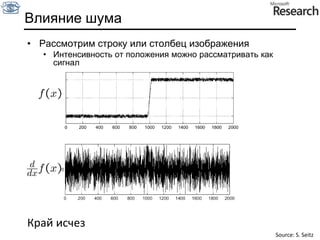
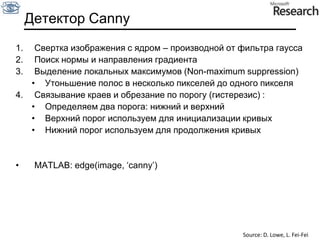
Документ представляет собой курс по анализу изображений, охватывающий методы сопоставления шаблонов и выделения краев. Описываются различные подходы к обработке изображений, включая нормализацию освещения, использование градиентов и методы бинаризации, а также проблемы, возникающие при анализе изображений. Основное внимание уделяется разработке детекторов краев и методам оценки качества детекторов.





























































