Kirill Rozin - Computer Vision. Alchemy of Modeling
•
1 like•280 views

Tech talk by Kirill Rozin, given on rannts #13 http://rannts.ru/meetups/13/

Recommended
Recommended
More Related Content
What's hot
What's hot (19)
Similar to Kirill Rozin - Computer Vision. Alchemy of Modeling
Similar to Kirill Rozin - Computer Vision. Alchemy of Modeling (20)
Kirill Rozin - Computer Vision. Alchemy of Modeling
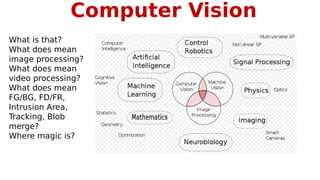
- 1. Computer Vision What is that? What does mean image processing? What does mean video processing? What does mean FG/BG, FD/FR, Intrusion Area, Tracking, Blob merge? Where magic is?
- 2. зрение Компьютерное зрение представляет собой дисциплину, которое включает в себя методы сбора, обработки, анализа, и распознования образов на видео или изображении. Типичные задачи компьютерного зрения: Анализ движения ОтслеживаниеОбнаружение объекта Распознавание объектов КлассификацияРаспознавание лица Распознавания эмоций Оптическое Распознавание символов Подсчет Карта «горячая» Доп. реальность
- 6. Окружение CV • Все виды сенсоров: • Audio, Video, Image, IR, Stereo, Electro-magnetic, Sonar, Laser etc • Может использоваться практически под любым HW/SW: • PC: Desktop, Laptop solutions for Windows / Linux / iOS / Android • Embedded: DSP, ARM, Stretch, FPGA etc • Clouds: Supported
- 7. Тренды • CV решения на SoC (System-on-a-Chip) растут быстро • Аналоговые камеры заменяются на IP cams • Низкоеразрегение at 5..15 FPS заменяется на HD/Full HD video at high 25..30+ FPS • Grayscale данные заменяются на Color • CV алгоритмы становятся более CPU greedy • More GPU HW platforms now available for CV applications • Clouds support becomes an usual requirement
- 8. Open CV lib
- 9. CV рынок “Big” игроки Googl e Yande x Apple
- 10. CV Standard • Khronos OpenVX Computer Vision Standard Finalized (by October 20, 2014)
- 11. Image Processing: Color spaces • General color spaces are: • 1. Red, Green, Blue • 2. Hue, Saturation, Value(Brightness) тон, насыщенность, значение • 3. Grayscale
- 12. Image Processing: Analyze images Обработка изображений — любая форма обработки информации, для которой входные данные представлены изображением, например, фотографиями или видеокадрами. Обработка изображений может осуществляться как для получения изображения на выходе (например, подготовка к полиграфическому тиражированию, к телетрансляции и т. д.), так и для получения другой информации (например, распознание текста, подсчёт числа и типа клеток в поле микроскопа и т. д.). Кроме статичных двухмерных изображений, обрабатывать требуется
- 13. Image processing: Thresholding (1/2) Threshold Binary Truncate Threshold to Zero
- 15. Image processing: Thresholding (3/3) - Otsu's method • The adaptive thresholding is more effectively method than simple. • But exist a method of choise constant threshold, that is most effective in the cases of bimodal image (In simple words, bimodal image is an image whose histogram has two peaks). This name is Otsu’s Binarization. • Information about OpenCV futures thresholding: http://opencv-python- tutroals.readthedocs.org/en/latest/py_tutorials/py_imgproc/py_thresholding/py_thresholding.html Метод Оцу (англ. Otsu's method) — это алгоритм вычисления порога бинаризации для полутонового изображения, используемый в области компьютерного распознавания образов и обработки изображений.
- 17. Image processing: matrix filtering • The main operator is convolution of matrices []. The first argument is target region of image. The second part is Convolution kernel (filter). • Convolution kernel runs throughout the image. And we need to solve a problem with boundary elements convolution. • This solve with making borders for images: • 1. Adds a constant colored border. • 2. Make border as a mirror reflection of the border elements
- 18. Image processing: Smoothing (1/6) • Target: smooth image for easy object detection. Remove noise from image. • Get more information about OpenCV features of Smoothing: http:// opencv-python-tutroals.readthedocs.org/en/latest/py_tutorials/py_imgproc/py_f iltering/py_filtering.html
- 19. Image processing: Smoothing (2/6) - Averaging filter • 1. Averaging filter. •
- 20. Image processing: Smoothing (3/6) - Median filter • 2. Median filter. Effectively remove pepper-salt noise. We take pixel and area around, find out median (sorting, min(array)), replace source pixel value by median
- 21. Image processing: Smoothing (4/6) - Gaussian filter , • Фильтр Гаусса (Gaussian filter) обычно используется в цифровом виде для обработки двумерных сигналов (изображений) с целью снижения уровня шума. Фильтр размытия по Гауссу имеет сложность O(hi * wi * n *n), где hi, wi – размеры изображения, n – размер матрицы (ядра фильтра). Данный алгоритм можно оптимизировать с приемлемым качеством. Квадратное ядро (матрицу) можно заменить двумя одномерными: горизонтальным и вертикальным. Для размера ядра 5 они будут иметь вид: Фильтр применяется в 2 прохода: сначала горизонтальный, а потом к результату вертикальный (или на оборот).
- 22. Image processing: Smoothing (5/6) – bilateral filtering Bilateral filtering. Effectively remove Gaussian noise with preserve a borders. It consist of two parts. Right is a Gaussian, and left is deep fall Функция сверки – объёмная Те мы выберем ядро как Функцию среза от объемной двусторонний фильтр является нелинейным, находящим границы, удаляющий шум и сглаживающий фильтром для изображений. Значение интенсивности каждого пикселя в изображении заменяется средневзвешенным значением интенсивности от соседних пикселей.
- 23. Image processing: Smoothing (6/6) - Kalman filter Фиильтр Каилмана — эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений. Универсальный фильтр Удаления “Гаус шума”. Используется для улучшения разрешения изображения. • For more information about Kalman filter read: http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/, http:// www.computeroptics.smr.ru/KO/PDF/KO38-1/380117.pdf.
- 24. • Image processing: Mathematical morphology (1/5)
- 25. • 1. Erosion (эрозия) ‘’ [Image Area & Kernel] – returns 1 if all elements of image Area is 1, else 0. -> • 2. Dilation (расширение) ‘’ [Image Area | Kernel] – returns 1 if exist element of image Area is 1, else 0. -> Image processing: Mathematical morphology (2/5)
- 26. • 3. Opening is just another name of erosion followed by dilation. It is useful in removing noise, as we explained above. • 4. Closing is reverse of Opening, Dilation followed by Erosion. It is useful in closing small holes inside the foreground objects, or small black points on the object. Image processing: Mathematical morphology (3/5)
- 27. • 5. Morphological Gradient is the difference between dilation and erosion of an image. The result will look like the outline of the object. • 6. Inner Bound is the difference between image and erosion. • 7. Outer Bound is the difference between dilation and image. Image processing: Mathematical morphology (4/5)
- 28. • Image processing: Mathematical morphology (5/5)
- 29. •Target: Find image gradients and edges • Get more information about OpenCV features of Gradients: http://opencv-python-tutroals.readthedocs.org/en/latest/p y_tutorials/py_imgproc/py_gradients/py_gradients.html Image processing: Gradients (1/4)
- 30. • Image processing: Gradients (2/4) Оператор Собеля Оператор Собеля — дискретный дифференциальный оператор, вычисляющий приближённое значение градиента яркости изображения. Результатом применения оператора Собеля в каждой точке изображения является либо вектор градиента яркости в этой точке, либо его норма. Используется в области обработки изображений, в частности, часто применяется в алгоритмах выделения границ.
- 31. • The Sobel-Feldman does not have perfect rotational symmetry. Scharr looked into optimizing this property. • 2. Sharr filter is like a Sobel operator, but Gx and Gy matrices are: • Image processing: Gradients (3/4) Оператор Щарра Оператор Собеля сглаживает паразитные эффекты на изображении, вызываемые чисто центрально-дифференциальным оператором, но не обладает полной вращательной симметрией. Щарр исследовал улучшение этого свойства и пришёл к выводу, что лучшие результаты даёт другое ядро свертки ядро
- 32. •• Image processing: Gradients(4/4) Оператор Лапласа Операитор Лапласа (лапласиаин, оператор дельта) — дифференциальный оператор, действующий в линейном пространстве гладких функций и обозначаемый символом Функции F он ставит в соответствие функцию в n-мерном пространстве.
- 33. Image processing: Canny Оператор Кэнни (детектор границ Кэнни, алгоритм Кэнни) в дисциплине компьютерного зрения — оператор обнаружения границ изображения. Основные этапы алгоритма: • Сглаживание. Размытие изображения для удаления шума. • Поиск градиентов. Границы отмечаются там, где градиент изображения приобретает максимальное • значение. • Подавление немаксимумов. Только локальные максимумы отмечаются как границы. • Двойная пороговая фильтрация. Потенциальные границы определяются порогами. • Трассировка области неоднозначности. Итоговые границы определяются путём подавления • всех краёв, несвязанных с определенными (сильными) границами.
- 34. First Steps in Computer Vision Detect & Recognize
- 35. Task Definition • Indoor camera is looking at secure area • Intrusion Area is defined at scene • We need Video Analytics system to: 1. Record video data related to any activity that occurs at scene 2. Detect and report any suspicious activity in Intrusion area 3. If person/human had occurred in intrusion area do recognition whether it is possible
- 36. Sample Scene
- 37. Task #1: Detect Any Activity At Scene • The simplest way for completion of this task is: prepare Near Frames Difference (NFD) image
- 38. Task #1: Detect Any Activity At Sceneframe difference is taken from the current frame and previous frame NFD thresholding is done using the Otsu’s method. perform the morphological operations to remove the noise present in the image (erosion and dilation ). We used median filter on the thresholder image Centroid and Bounding Box on detected vehicle
- 39. Task #1: Detect Any Activity At Scene • Approach A (fast & not robust): • Where ‘sensitivityTheshold’ specifies how big absolute value of NFD image pixel should be for recognizing it as significant difference • Where ‘MinMotionThresholdPerc’ specifies: what is the minimal % of scene change shall be recognized as Motion at Scene event rchresholdPeMinMotionT widthheight SumNonZero ctedMotionDete yThresholdsensitivitcolrowNFDPixSumNonZero height row width col )%100( ),( 1 1
- 40. Task #1: Detect Any Activity At Scene• Approach B (still fast & more robust): • compute NFD image & make its binary version NFDBin using ‘sensitivityThreshold’ value (see approach A for details) • Detect all blobs (red, green) using segmentation approach applied over NFDBin image; do dilate/erode operation if needed; filter out all blobs that have insignificant size (red) and pass other(green) • Report Motion At Scene event if: • either # Sum of left Blobs area exceeded some MinSceneChangeThr OR • At least one blob that has reasonable size was detected The thresholding is done using the Otsu’s method.
- 41. Task #1: Detect Any Activity At Scene • Important! There are several approaches available for NFD image computation: • Based on usage of cyclic images buffer and computation of Near Frame Difference between the most old and most recent image in the buffer • Based on update at every frame of every pixel of M_HISTORY image with say ‘0’ if motion was observed for some pixel or doing pix(r,c)++ otherwise NFDBin image then can be prepared by using threshold function applied to M_HISTORY: NFDBin(r,c) = (M_HISTORY(r,c)> FrmThr) ? 255: 0M_HISTORY image new motion – white previous motion – value (we forgot in time) Pre previous motion – become more dark
- 42. Task #2: Detect Suspicious Activity in Intrusion Area • At first it is needed to define what ‘suspicious’ means; not every activity is suspicious, for ex.: • Shadows – static and dynamic are OK • Pets are OK • Office Illumination ON/OFF is OK • Customer recognizes activity as suspicious if: • A person without granted access permissions entered Intrusion area • ANY person presence in Intrusion area for more than 3 seconds
- 43. Task #2: Sub-task Shadow Suppression • There are two types of shadows: • Static: from static objects such as trees, columns, barriers etc (these still can change position over time) • Dynamic: from moving, i.e. non- stationary objects • Usually Shadow suppression is performed in HSV (preferred) or YUV (usually used) color spaces
- 44. Task #2: Sub-task Shadow Suppression • For Shadow Suppression (usually) three images are used: • BG: Reference frame, i.e. Background frame • CUR: Current frame • FG: Foreground/Mot ion mask image • Processing is
- 45. Task #2: Sub Task - Pets detection • Simple rejection of false detections by classifying them as pets can be done using invalidation by object size, w/h proportions etc • Advanced detection of pets can be performed using classifiers preliminary trained for pets: cats/dogs/birds detection; such classifiers if ran for input image might return
- 46. Task #2: Sub Task – Illumination changes support • System shall not generate false alarms if overall scene intensity drastically changed in a moment, i.e. lights were turned ON/OFF/TRIMMED • Such behavior can be implemented if % of changed pixels at NFD image exceeded some very high level say 90..95%; so if such change happened then in simple case no need to generate False Intrusion
- 47. Task #2: Detect Suspicious Activity • People detection sub-task: • The quickest but inaccurate yet approach is to generate Intrusion events for all objects from not allowed (i.e “ignore”) list • Another simple approach is to try to detect a person using check for object sizes/proportions etc • More advanced approach is to train classifier for people detection so it will return object BBOX if such happened in Region of
- 48. Task #2: Do Validation • As per requirement not every people intrusion requires Event generation – people from White list are allowed to enter • Person identification can be done by sequential running of Face Detector and Face Recognition approaches
- 49. Examples
- 50. ?Preguntas? Solía ser idiotas en las carreteras y ahora en busca de tontos раньше были дураки на дорогах а сейчас дураков ищут