Downloaded 14 times



















![> Отсутствие геометрических трансформаций
Малые локальные сдвиги
Большие горизонтальные сдвиги
Большой однородный сдвиг в любом направлении
Большой однородный сдвиг, поворот, масштабирование
A[x,y] ↔ B[x,y]
Задача поиска существенных изменений между изображениями
Задача сопоставления двух
изображений](https://image.slidesharecdn.com/sovrmatemcompzrenia-18-130528163841-phpapp01/85/DUMP-2013-22-320.jpg)
![Отсутствие геометрических трансформаций
> Малые локальные сдвиги
Большие горизонтальные сдвиги
Большой однородный сдвиг в любом направлении
Большой однородный сдвиг, поворот, масштабирование
A[x,y] ↔ B[x + epsX, y + epsY]
Оптический поток
Задача сопоставления двух
изображений](https://image.slidesharecdn.com/sovrmatemcompzrenia-18-130528163841-phpapp01/85/DUMP-2013-23-320.jpg)
![Отсутствие геометрических трансформаций
Малые локальные сдвиги
> Большие горизонтальные сдвиги
Большой однородный сдвиг в любом направлении
Большой однородный сдвиг, поворот, масштабирование
A[x,y] ↔ B[x + X, y]
Стереозрение
Задача сопоставления двух
изображений](https://image.slidesharecdn.com/sovrmatemcompzrenia-18-130528163841-phpapp01/85/DUMP-2013-24-320.jpg)
![Отсутствие геометрических трансформаций
Малые локальные сдвиги
Большие горизонтальные сдвиги
> Большой однородный сдвиг в любом направлении
Большой однородный сдвиг, поворот, масштабирование
A[x,y] ↔ B[x + U, y +V] где U,V – одинаковы для всех (x,y)
Сшивка изображений
Задача сопоставления двух
изображений
http://queue.acm.org/detail.cfm?id=2206309](https://image.slidesharecdn.com/sovrmatemcompzrenia-18-130528163841-phpapp01/85/DUMP-2013-25-320.jpg)
![Отсутствие геометрических трансформаций
Малые локальные сдвиги
Большие горизонтальные сдвиги
Большой однородный сдвиг в любом направлении
> Большой однородный сдвиг, поворот, масштабирование
A[x,y] ↔ B[ T(x,y) ] где T – афинный оператор
Поиск объектов на изображении
Задача сопоставления двух
изображений](https://image.slidesharecdn.com/sovrmatemcompzrenia-18-130528163841-phpapp01/85/DUMP-2013-26-320.jpg)












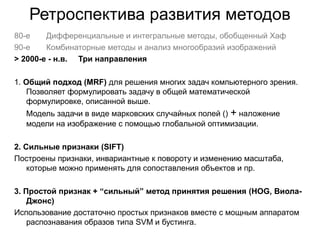



Доклад рассматривает современное состояние и основные методы компьютерного зрения, включая классификацию задач, успехи и существующие проблемы. Обсуждаются методы извлечения и анализа цветовых и геометрических структур, а также проблемы, связанные с комбинаторным взрывом и сегментацией изображений. Представлены обзорные ретроспективы развития методов компьютерного зрения с акцентом на ключевых алгоритмах и их применениях.






















































