The document provides an overview of game-playing and adversarial search, covering topics such as minimax search, alpha-beta pruning, and evaluation functions within game trees. It details the theoretical underpinnings of search strategies in turn-taking games and offers insights on practical implementations, including iterative deepening and handling of redundant nodes. Additionally, it highlights the achievements of computer algorithms in surpassing human expertise in games like chess and checkers.
![(Static) Heuristic Evaluation Functions
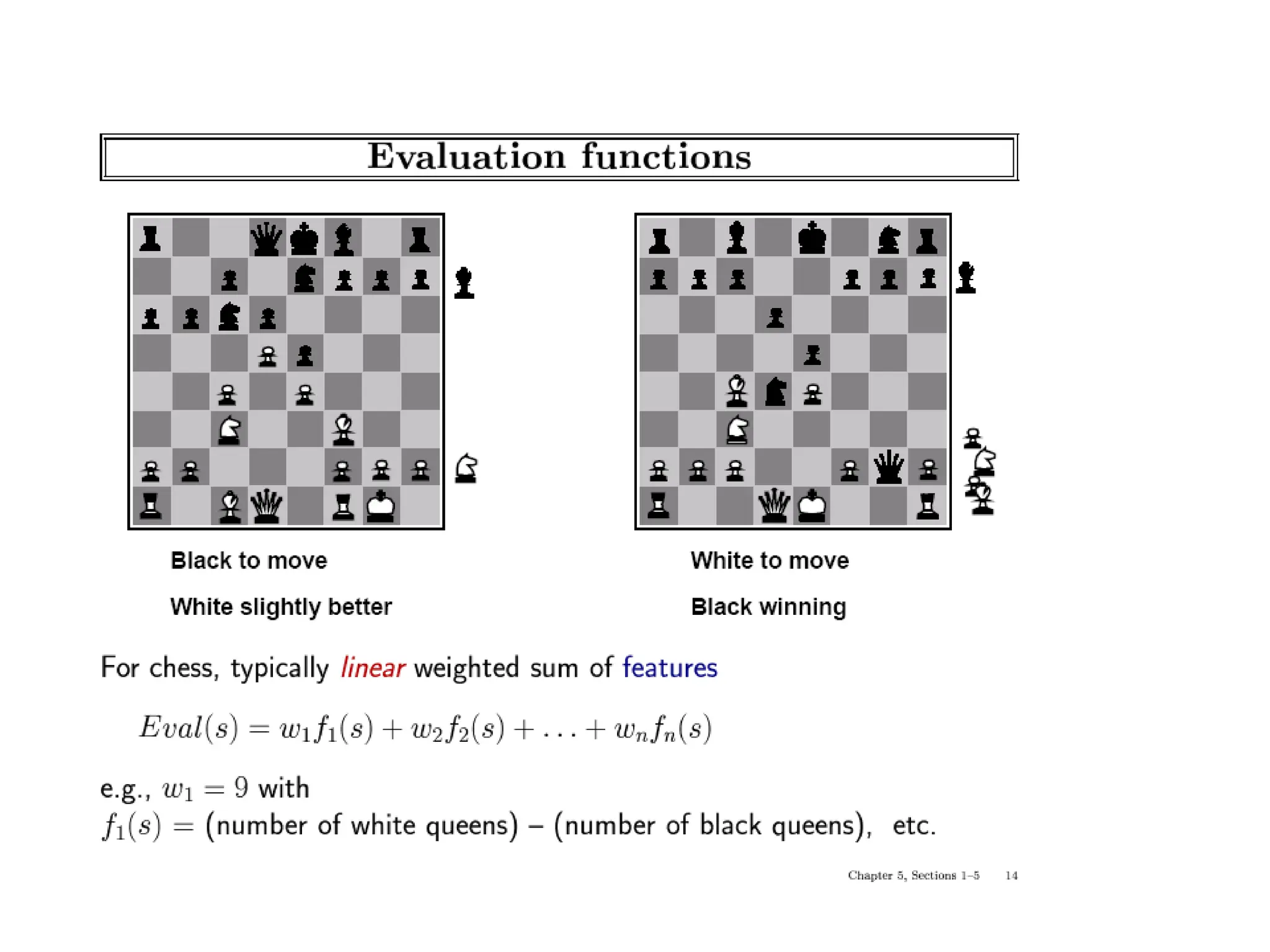
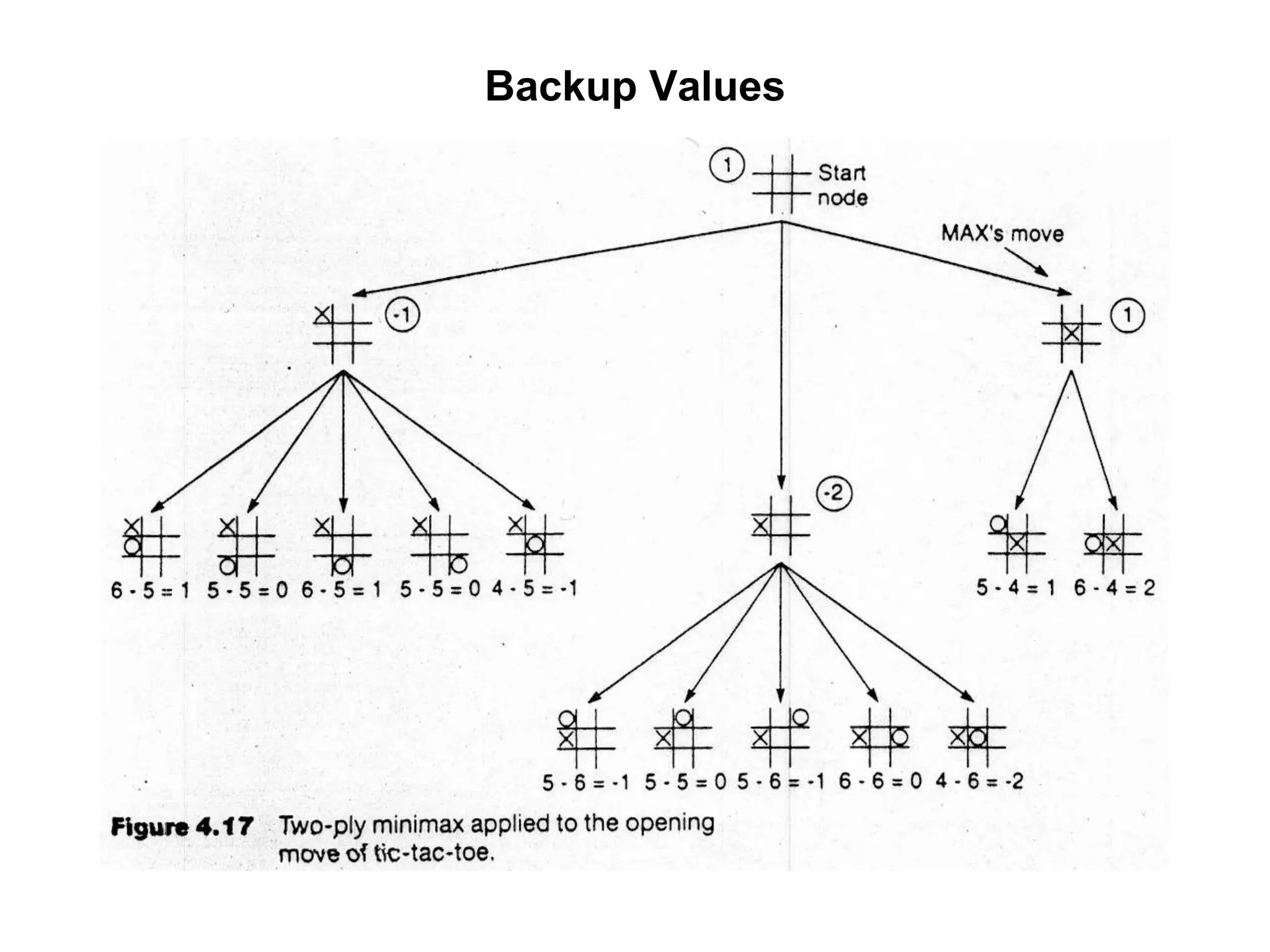
• An Evaluation Function:
– Estimates how good the current board configuration is for a player.
– Typically, evaluate how good it is for the player, how good it is for
the opponent, then subtract the opponent’s score from the player’s.
– Often called “static” because it is called on a static board position.
– Othello: Number of white pieces - Number of black pieces
– Chess: Value of all white pieces - Value of all black pieces
• Typical values from -infinity (loss) to +infinity (win) or [-1, +1].
• If the board evaluation is X for a player, it’s -X for the opponent
– “Zero-sum game”](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-17-2048.jpg)
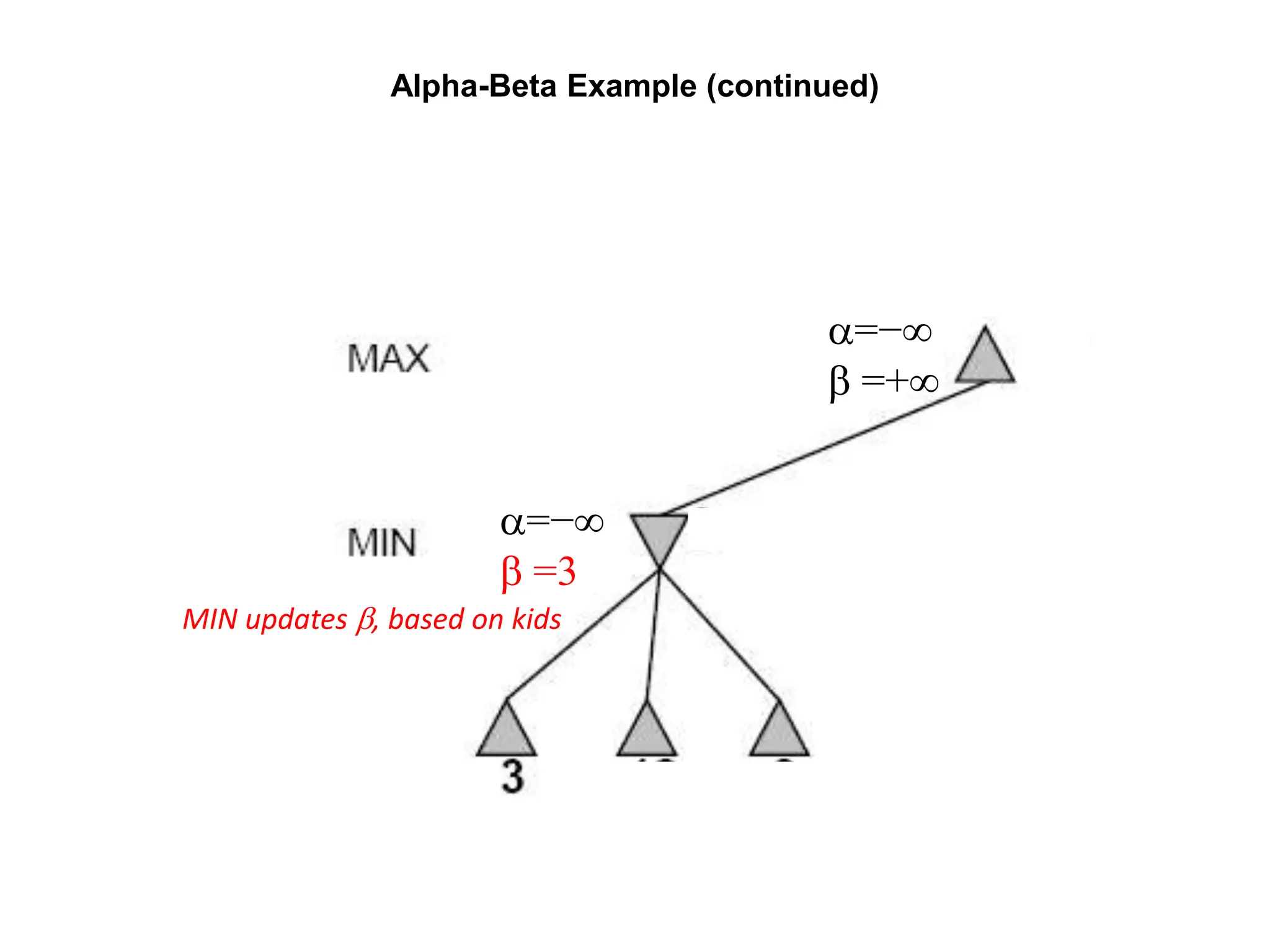
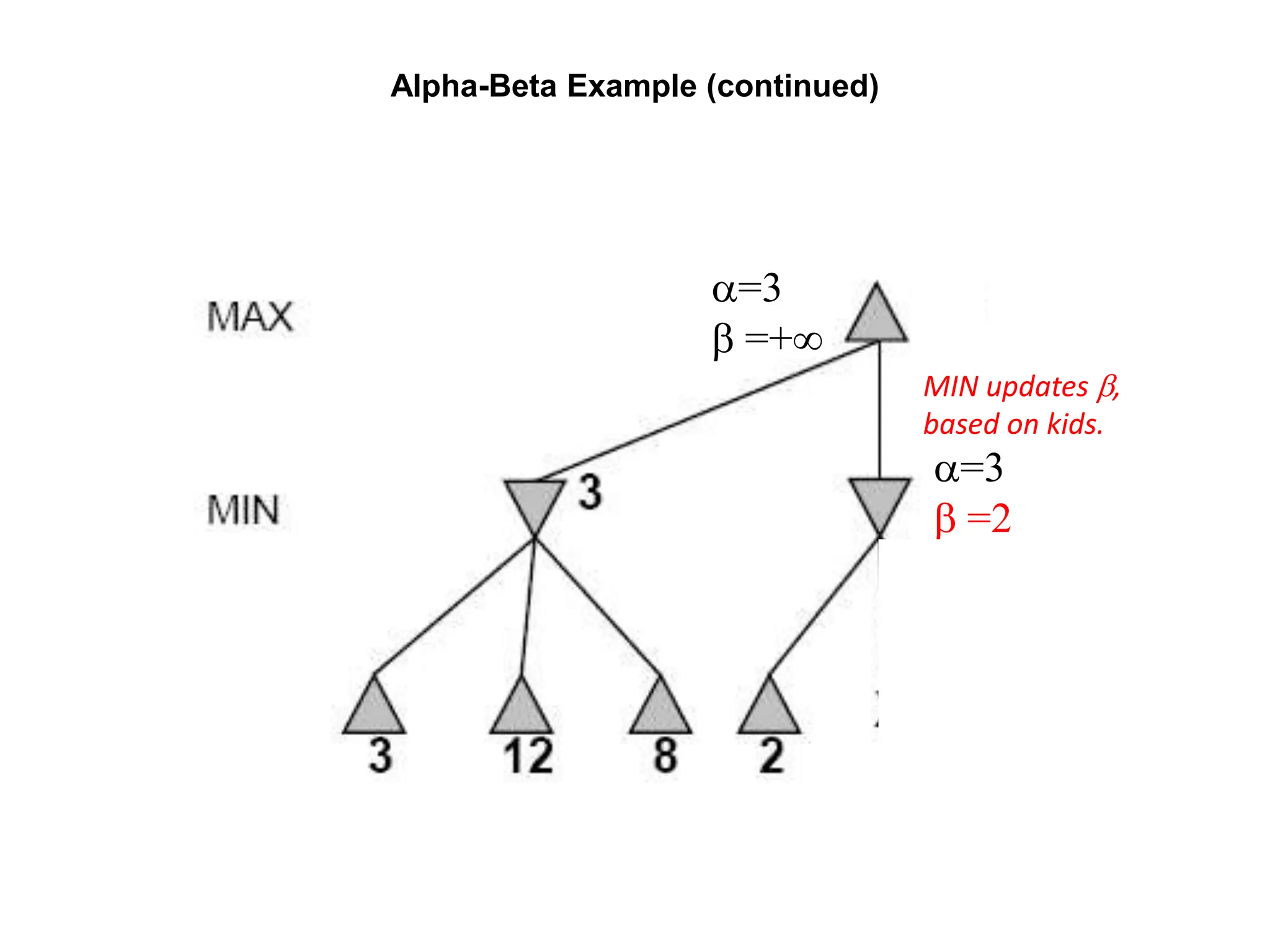
![Alpha-Beta Example (continued)
(−∞,3]
(−∞,+∞)](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-28-2048.jpg)
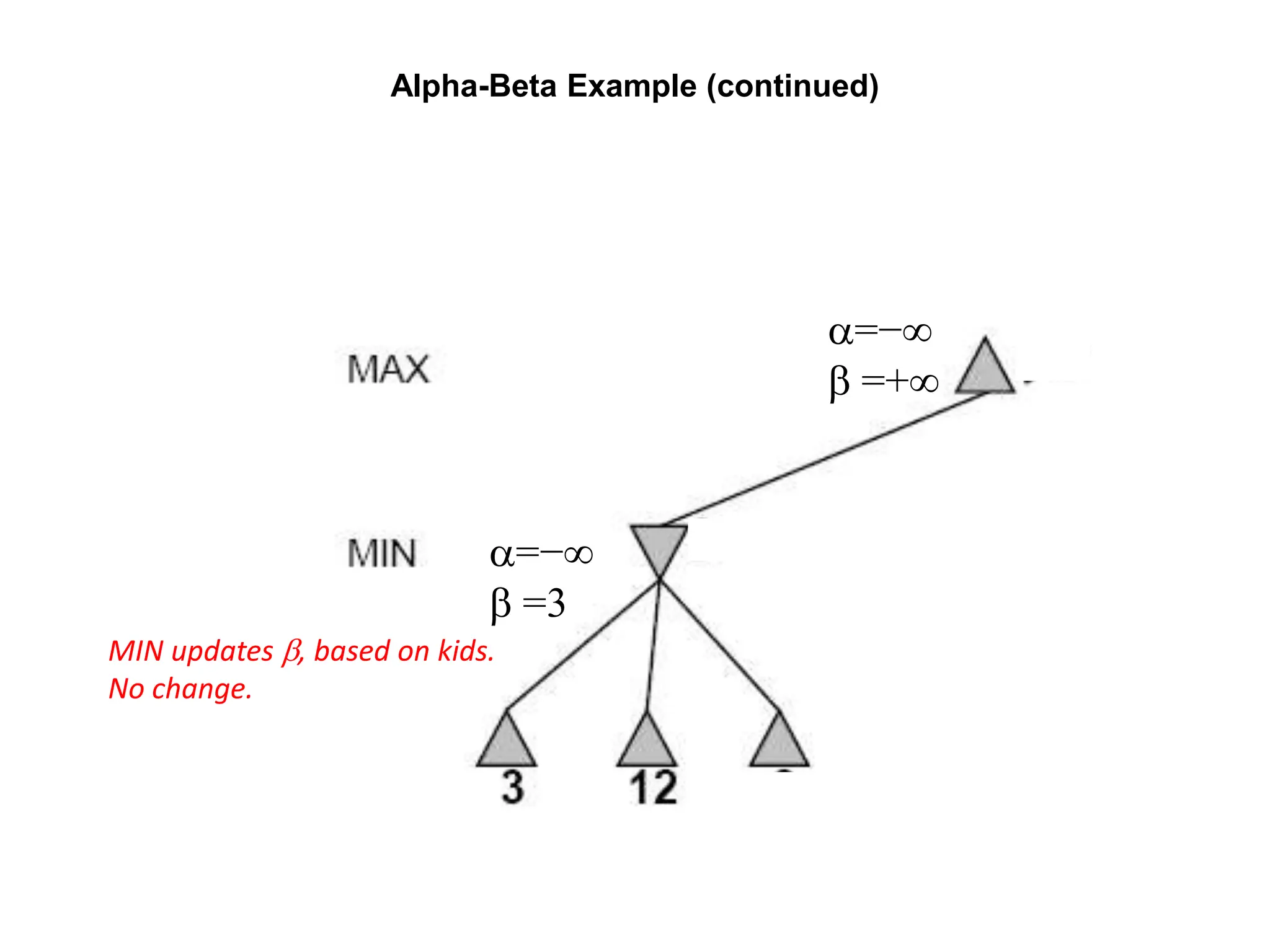
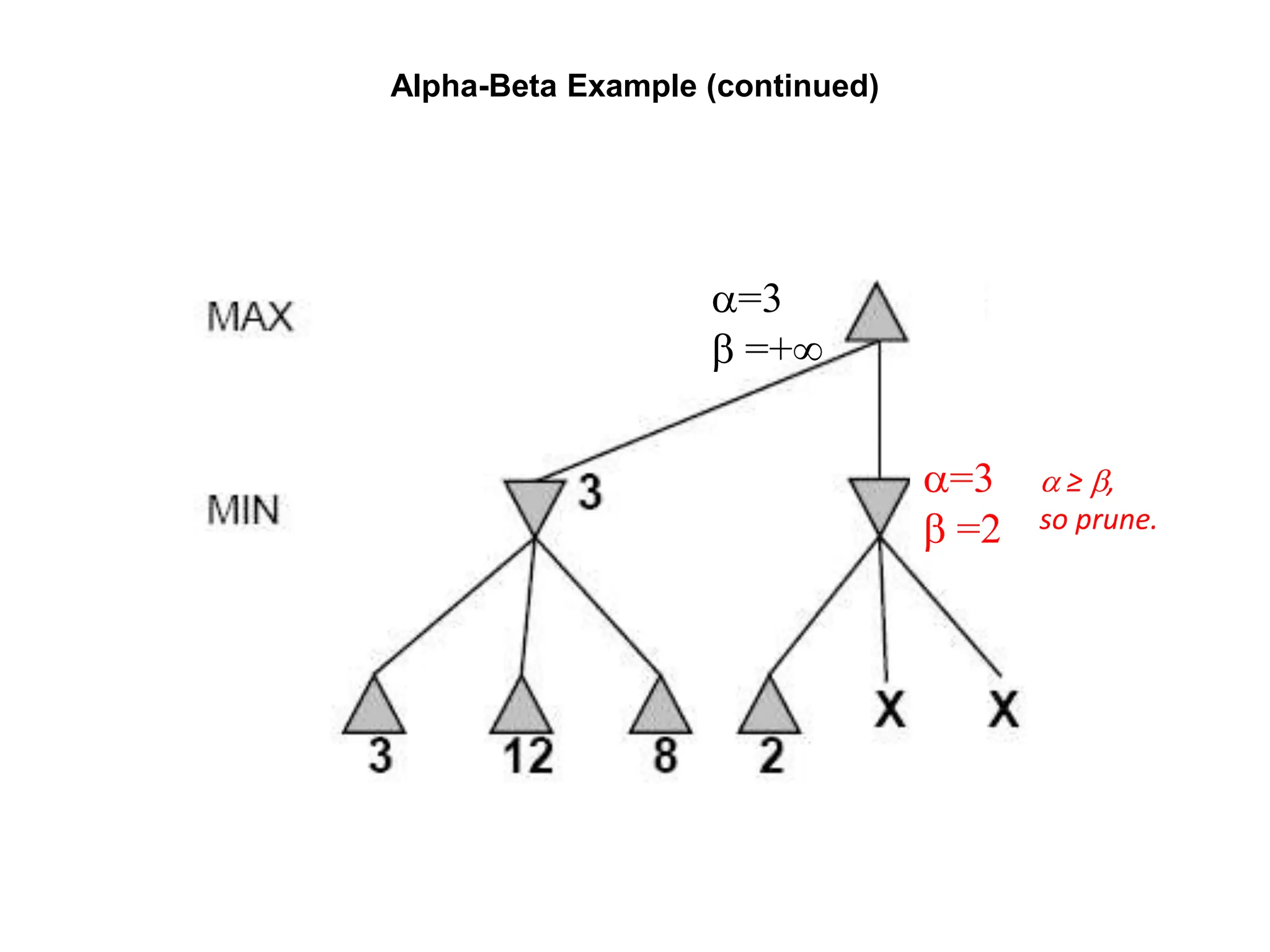
![Alpha-Beta Example (continued)
(−∞,3]
(−∞,+∞)](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-29-2048.jpg)
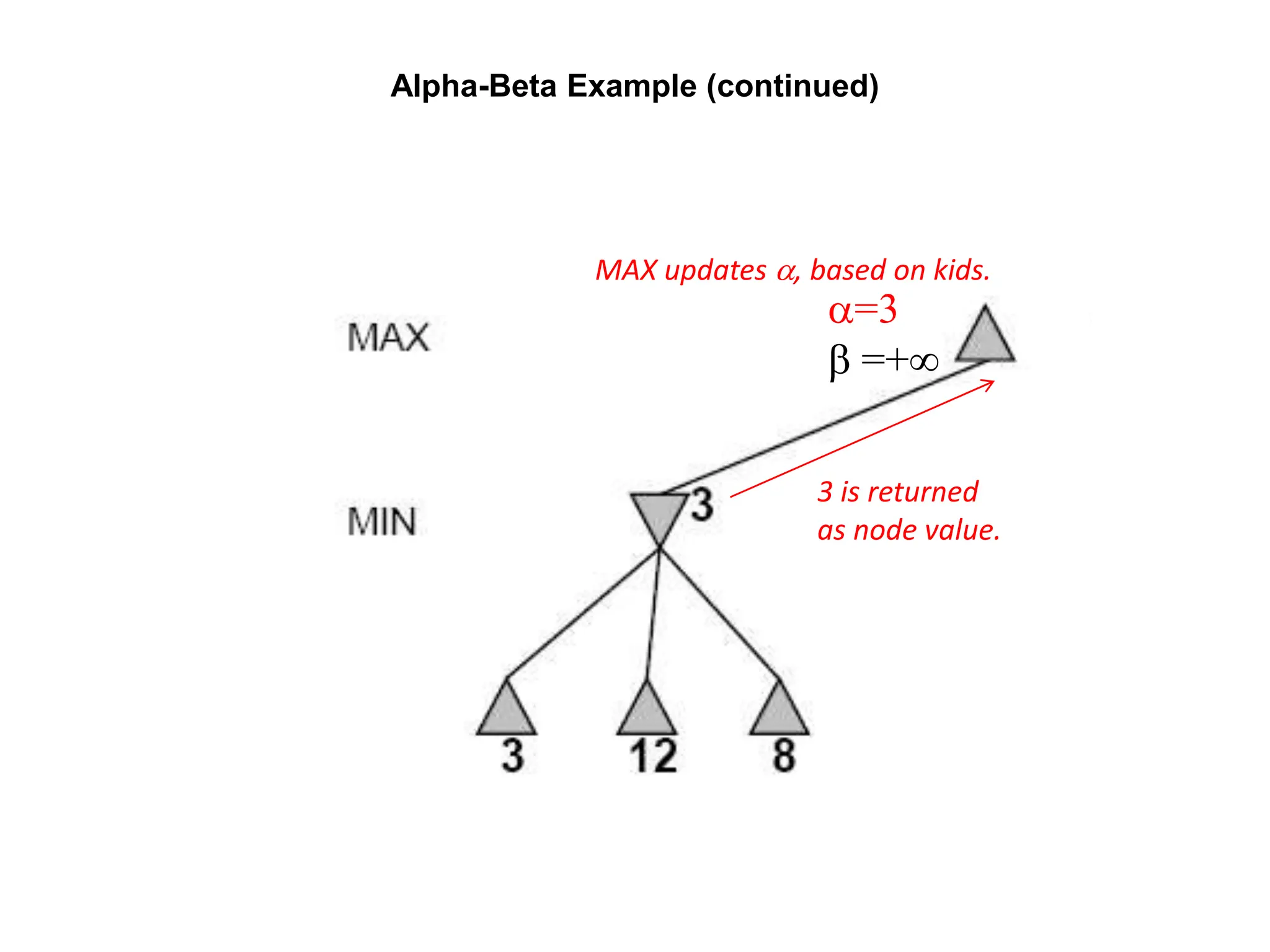
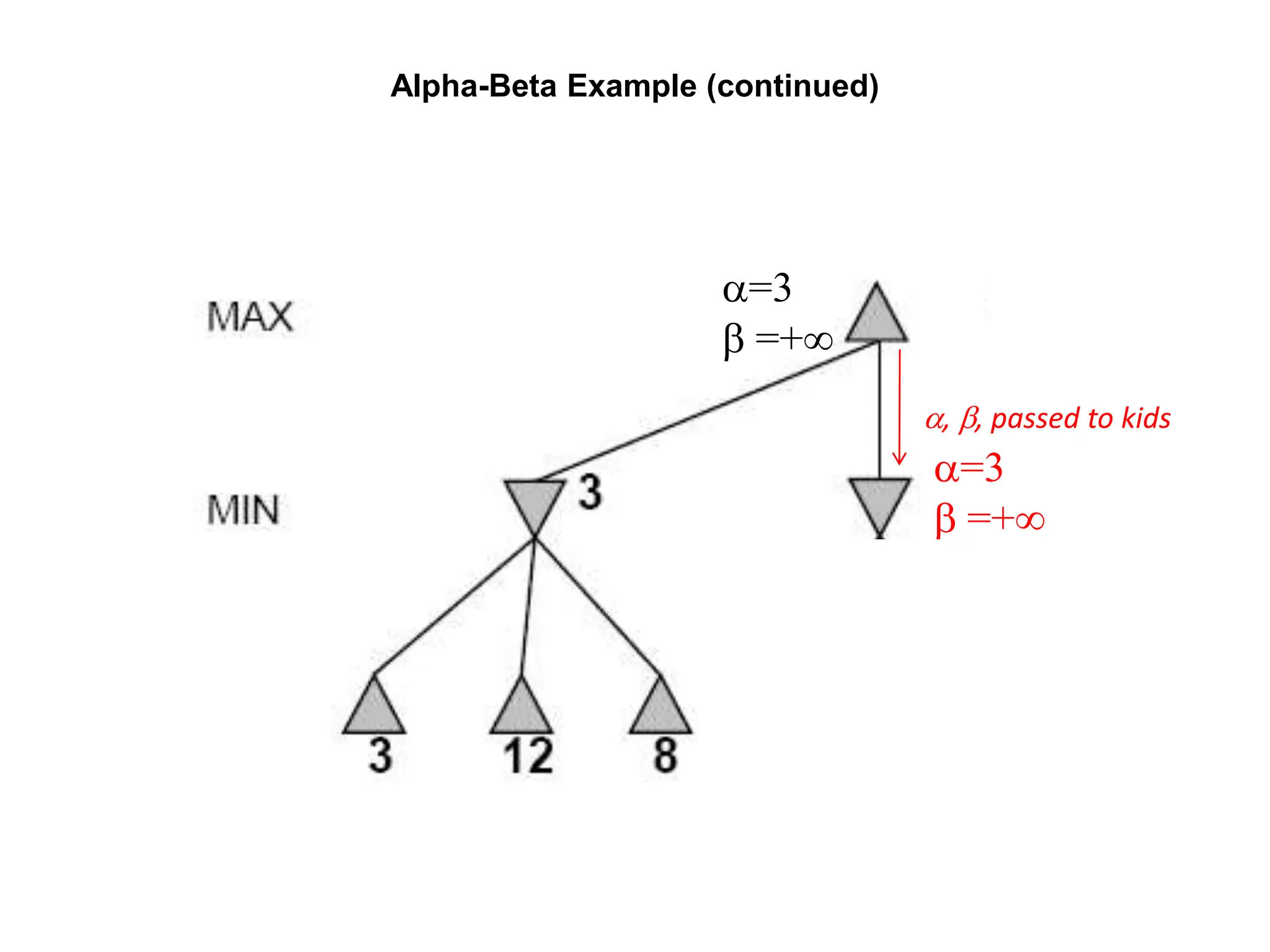
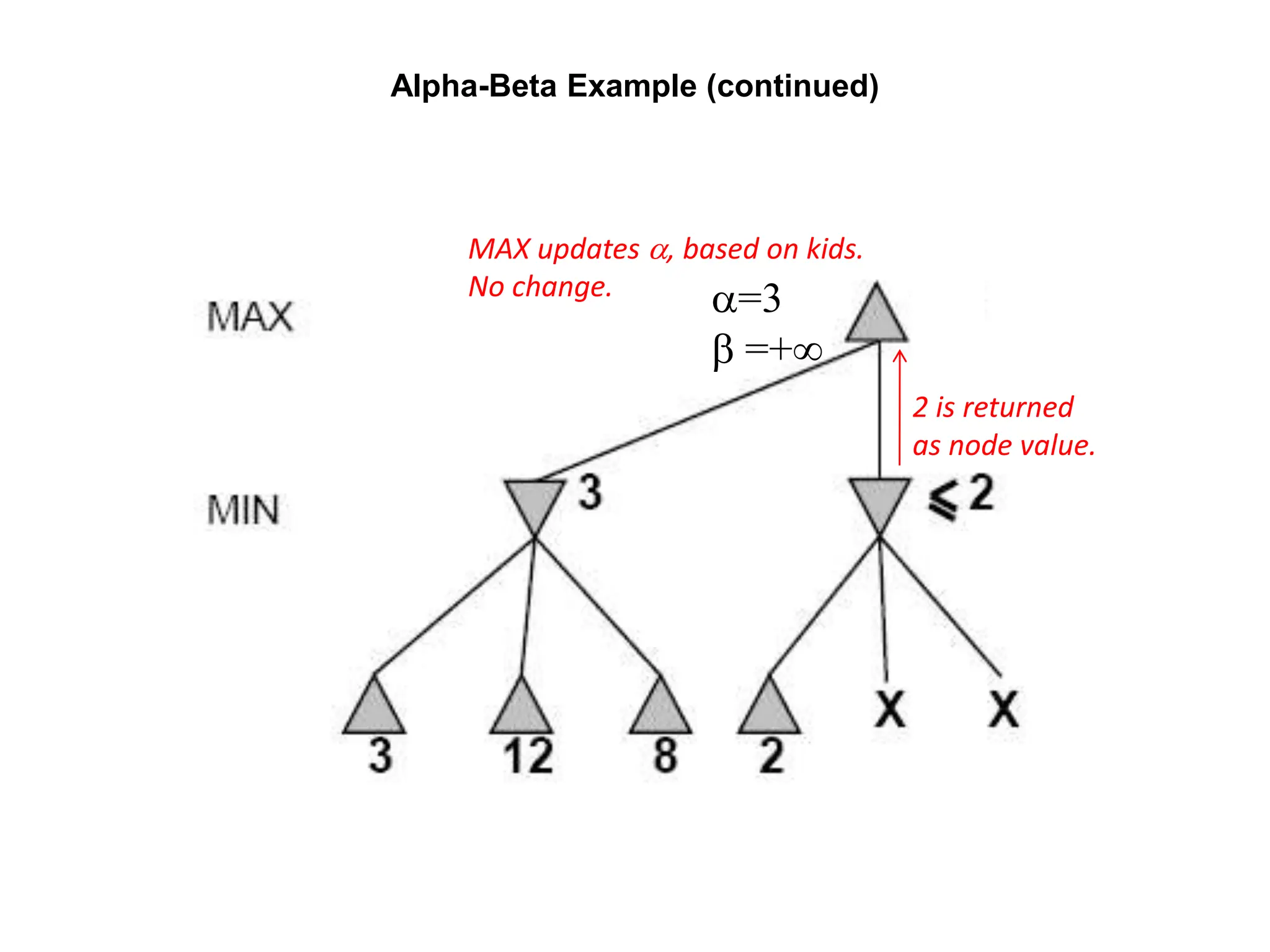
![Alpha-Beta Example (continued)
[3,+∞)
[3,3]](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-30-2048.jpg)
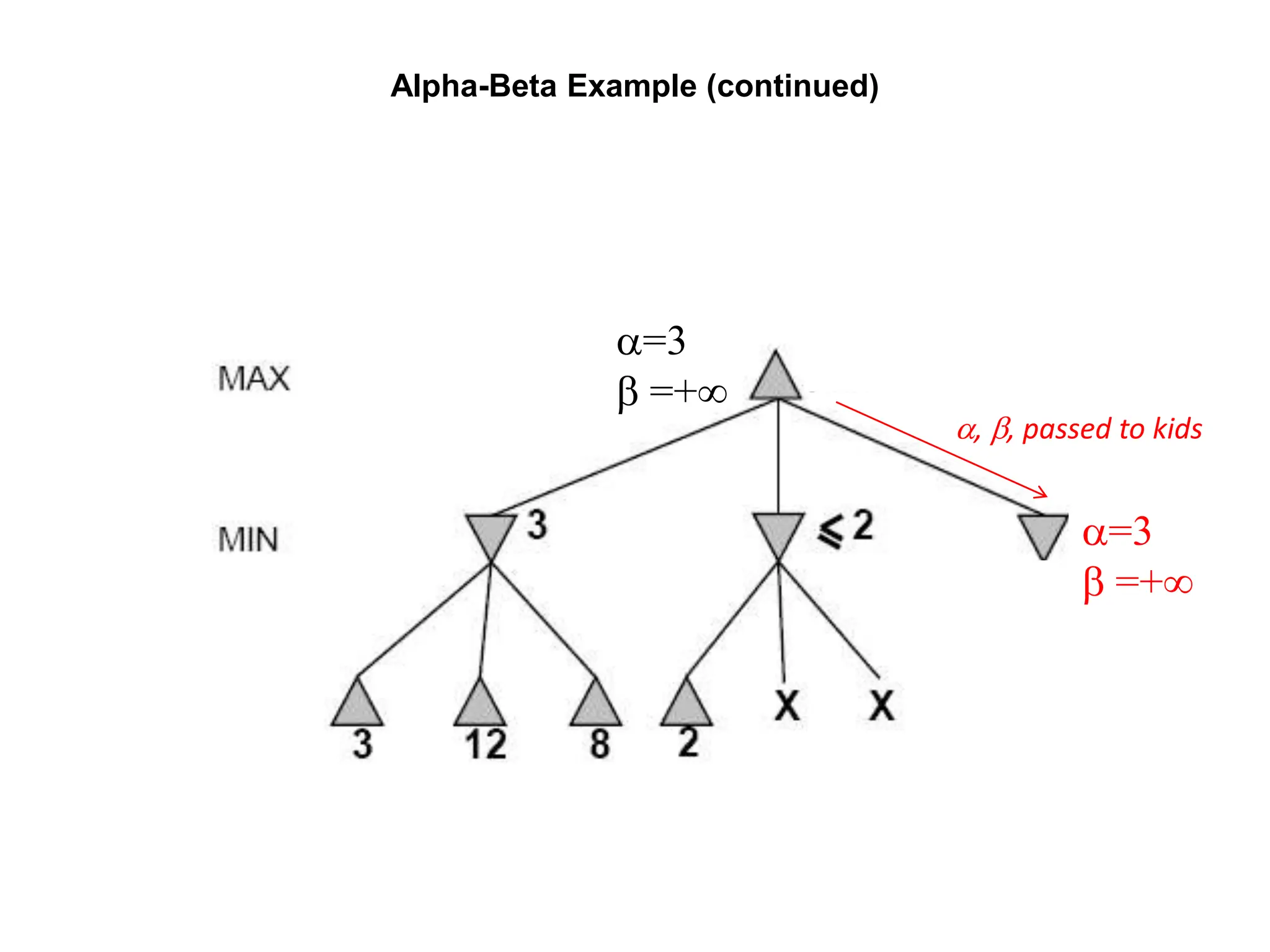
![Alpha-Beta Example (continued)
(−∞,2]
[3,+∞)
[3,3]
This node is
worse for MAX](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-31-2048.jpg)
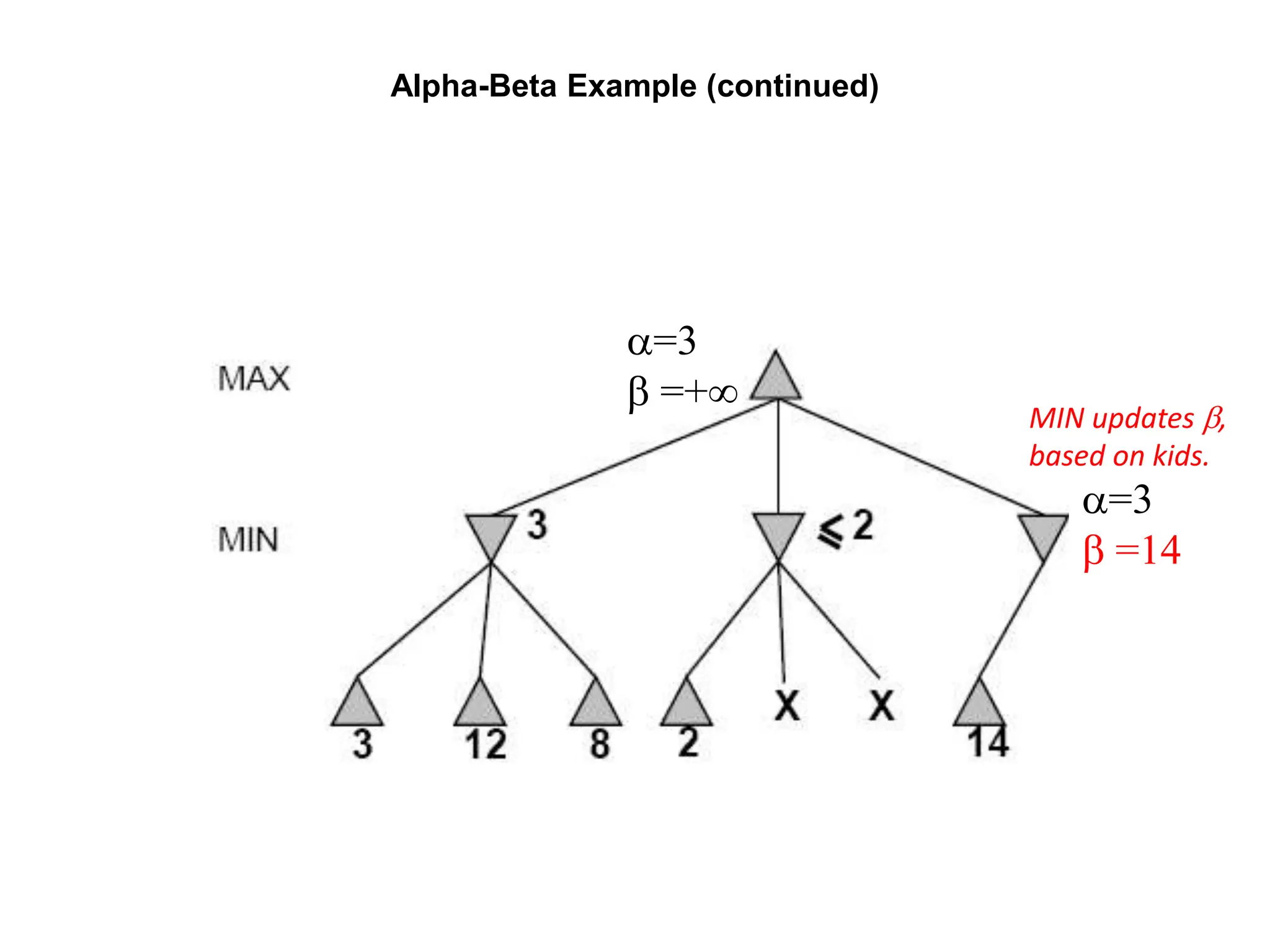
![Alpha-Beta Example (continued)
(−∞,2]
[3,14]
[3,3] (−∞,14]
,](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-32-2048.jpg)
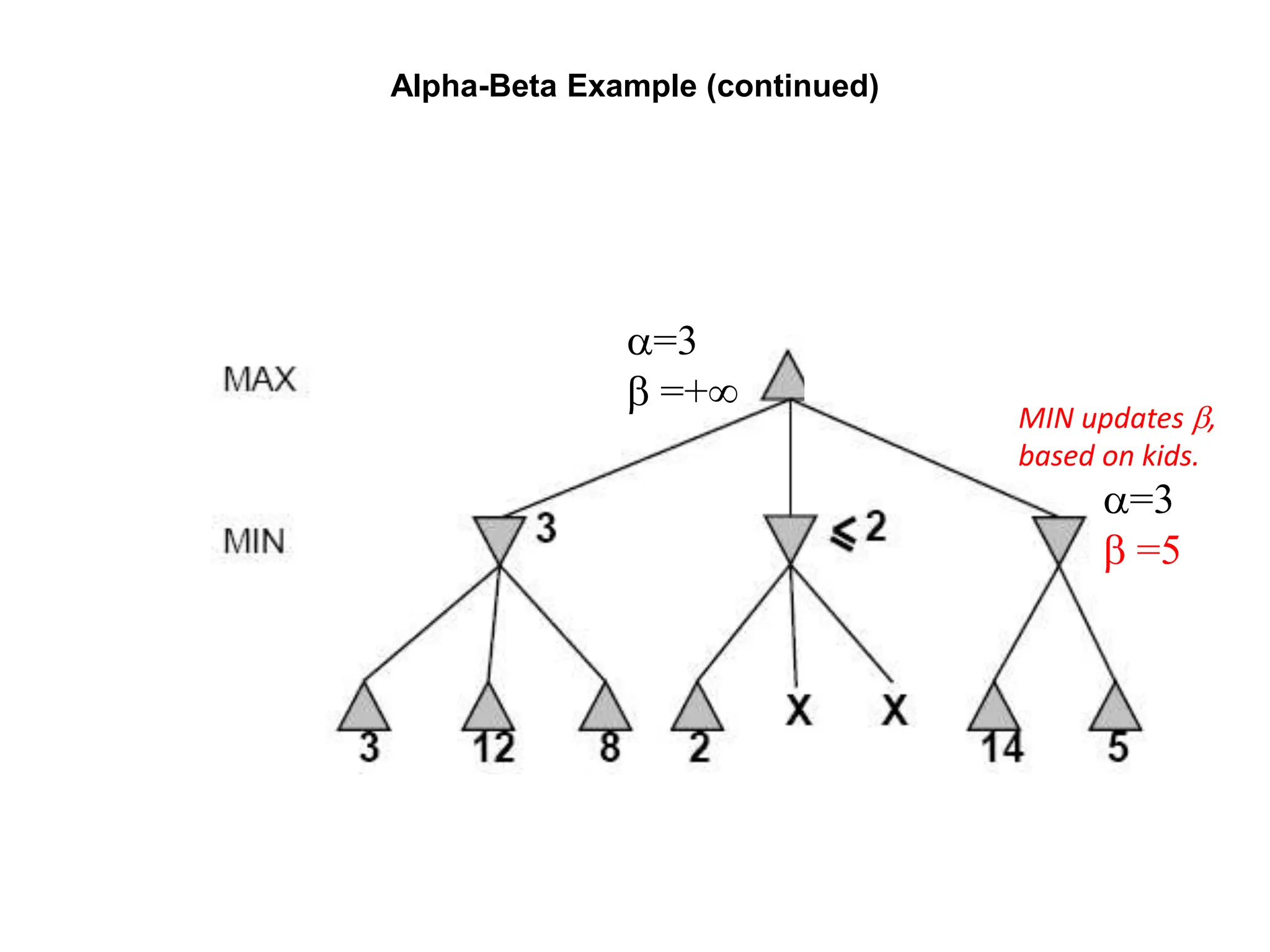
![Alpha-Beta Example (continued)
(−∞,2]
[3,5]
[3,3] (−∞,5]
,](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-33-2048.jpg)
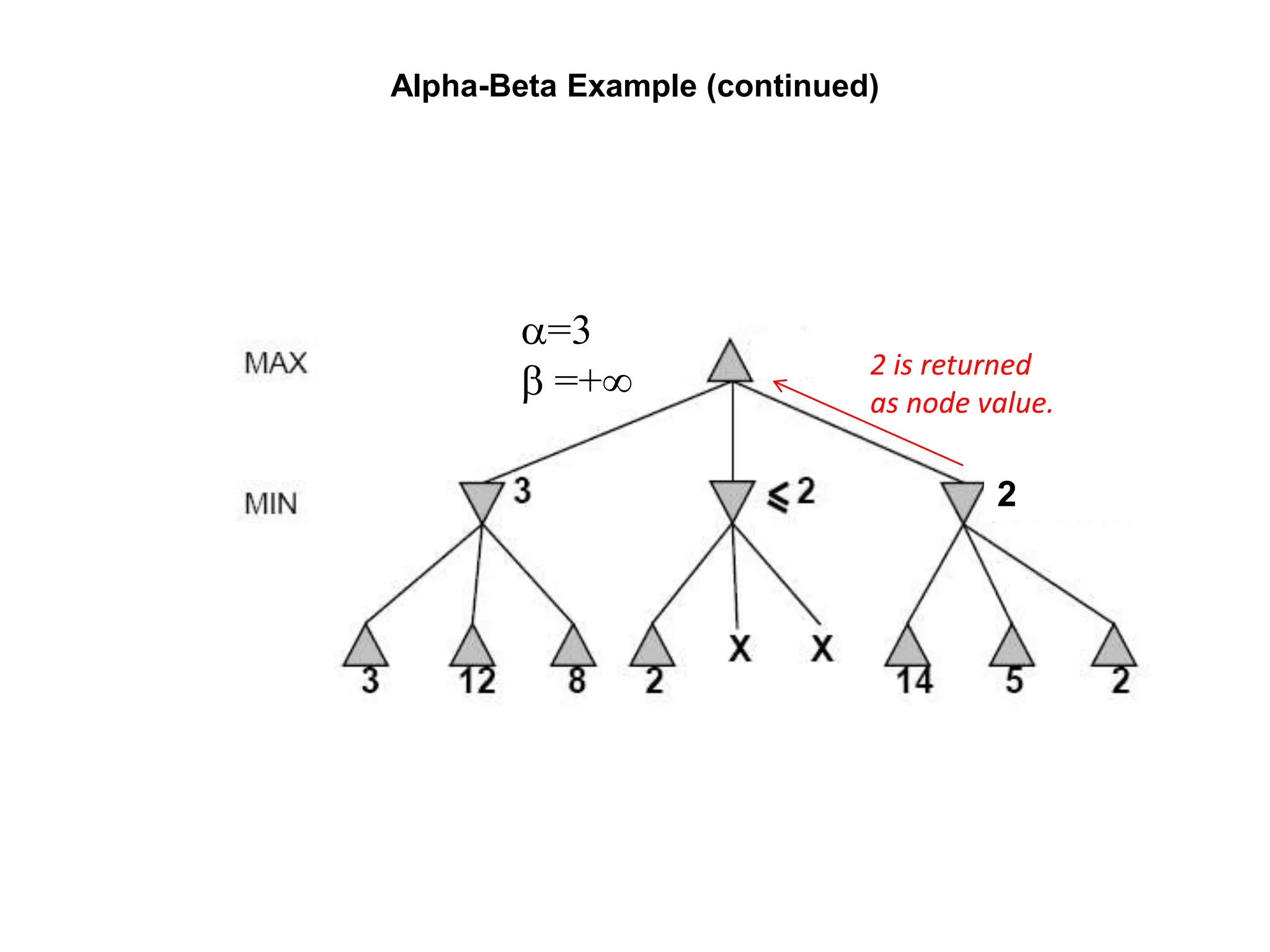
![Alpha-Beta Example (continued)
[2,2]
(−∞,2]
[3,3]
[3,3]](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-34-2048.jpg)
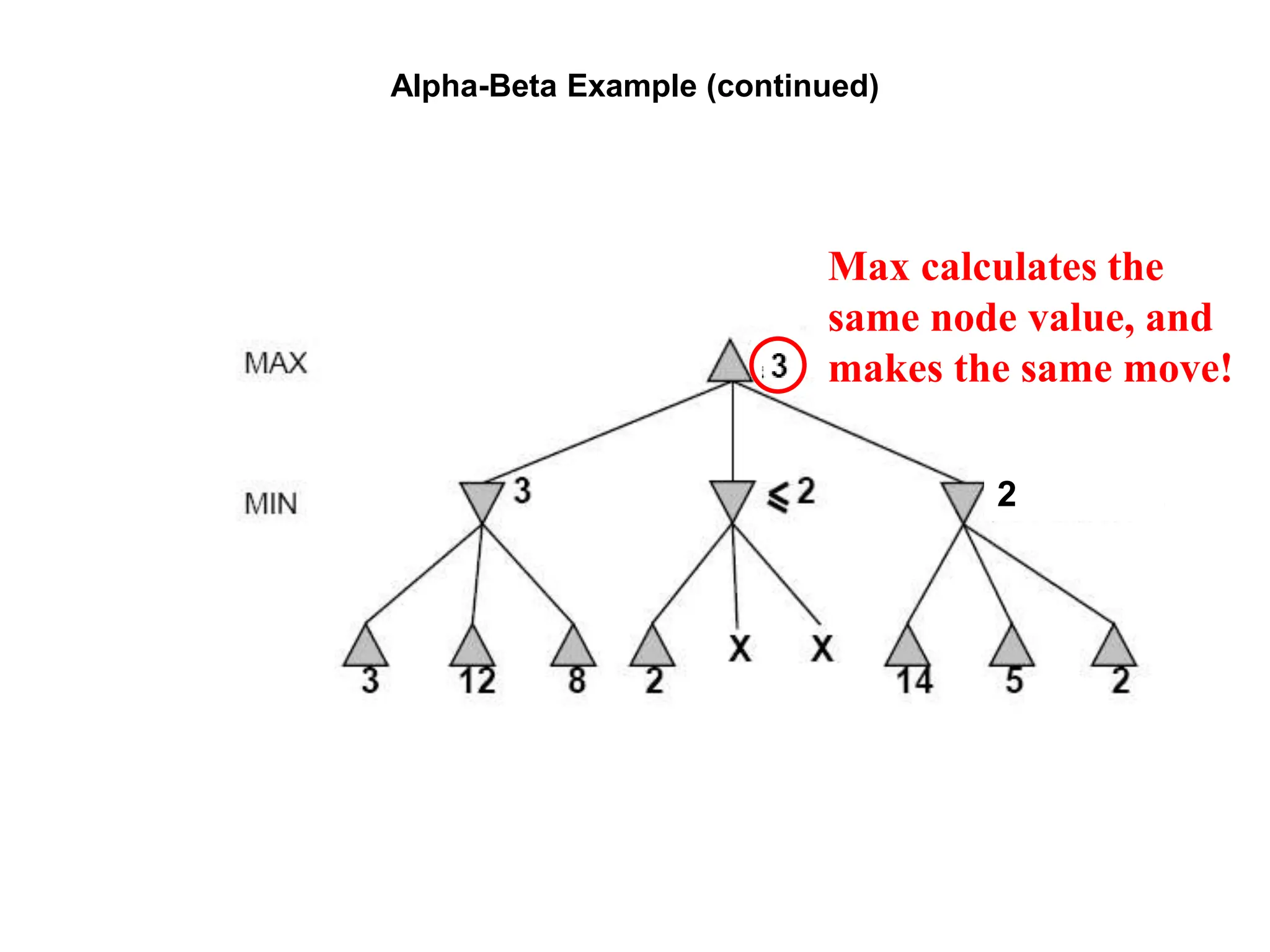
![Alpha-Beta Example (continued)
[2,2]
(−∞,2]
[3,3]
[3,3]](https://image.slidesharecdn.com/cs-171-07-games-240429011852-3997cd64/75/cs-171-07-Games-and-Adversarila-Search-ppt-35-2048.jpg)