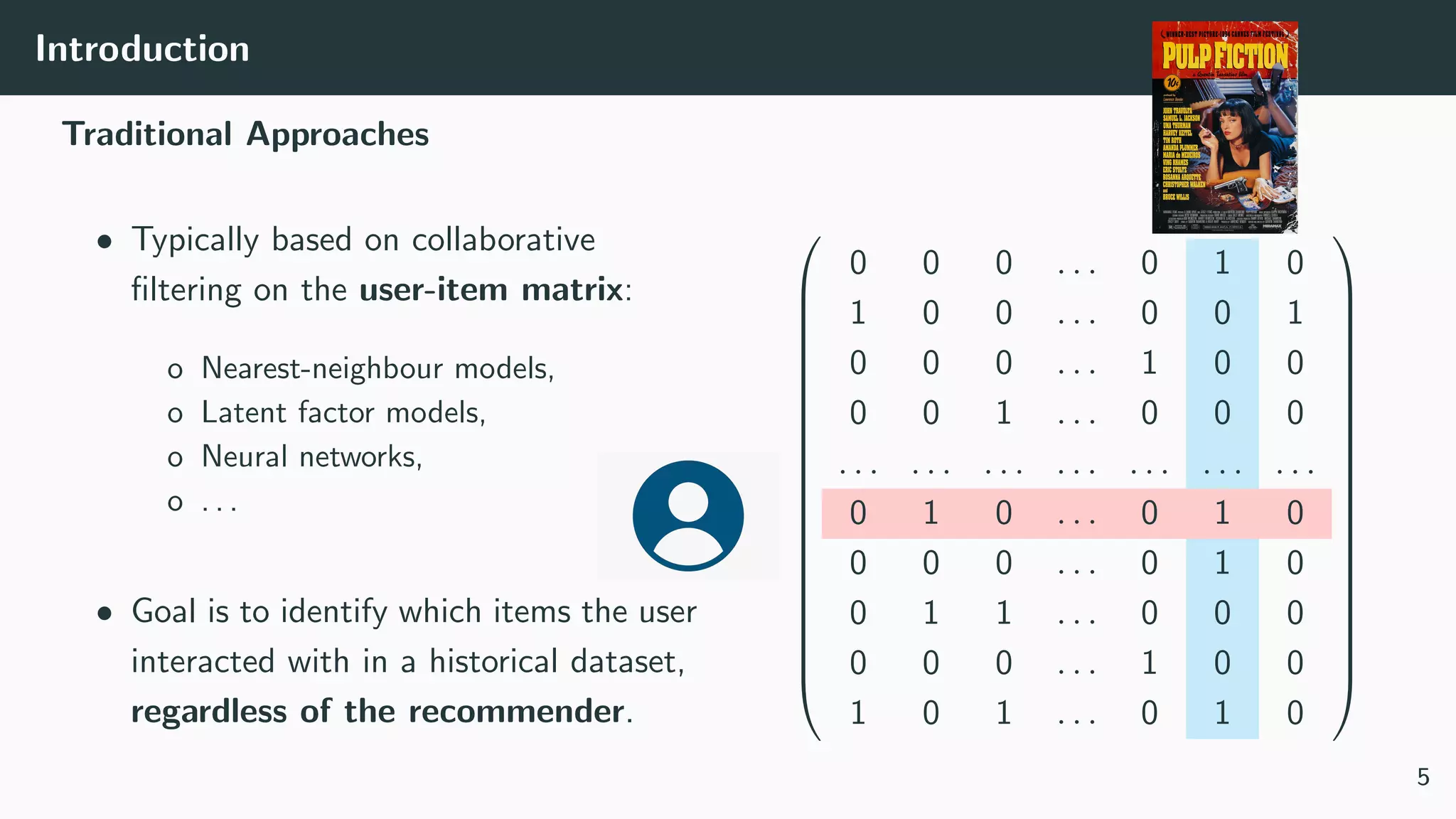
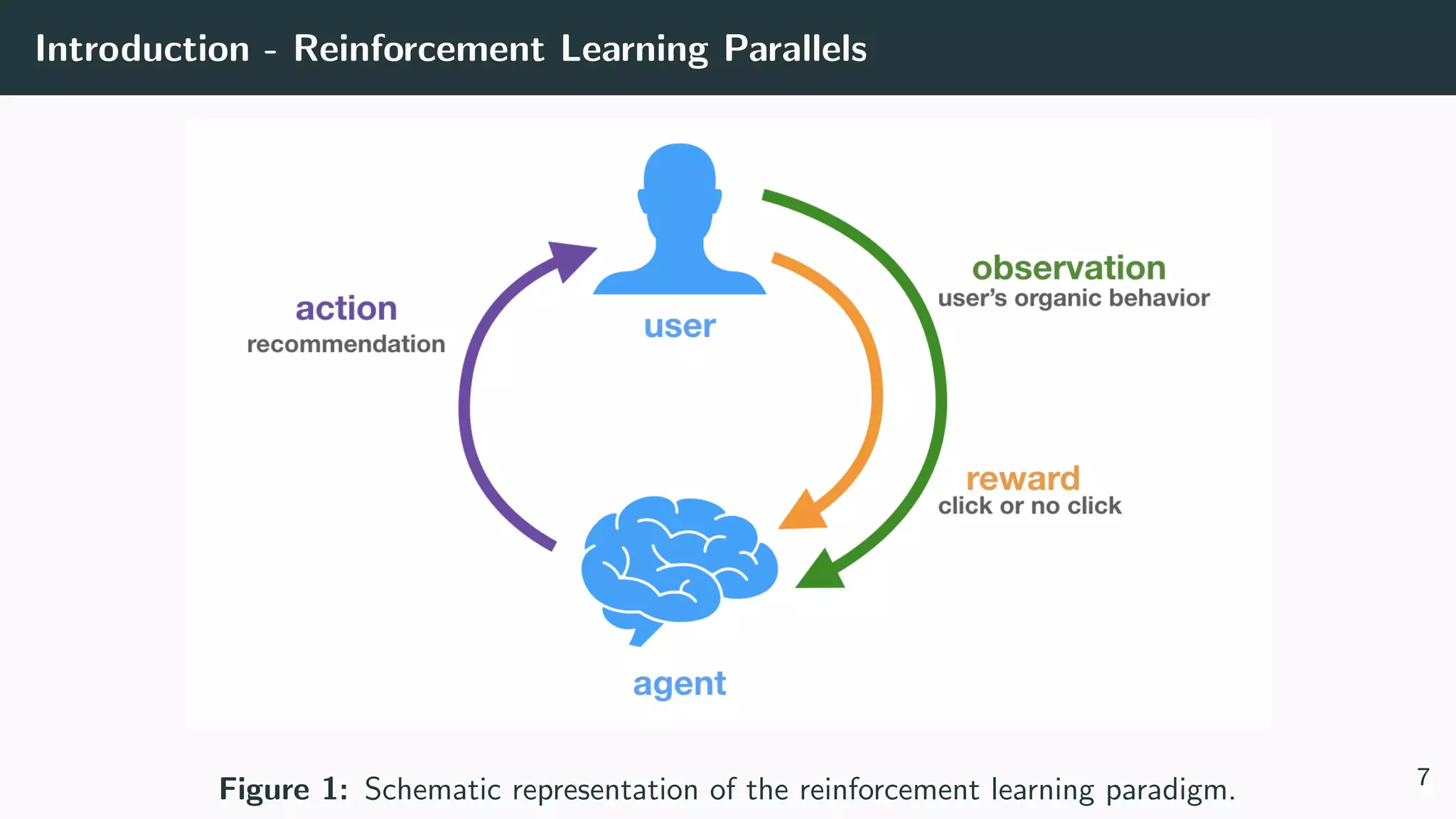
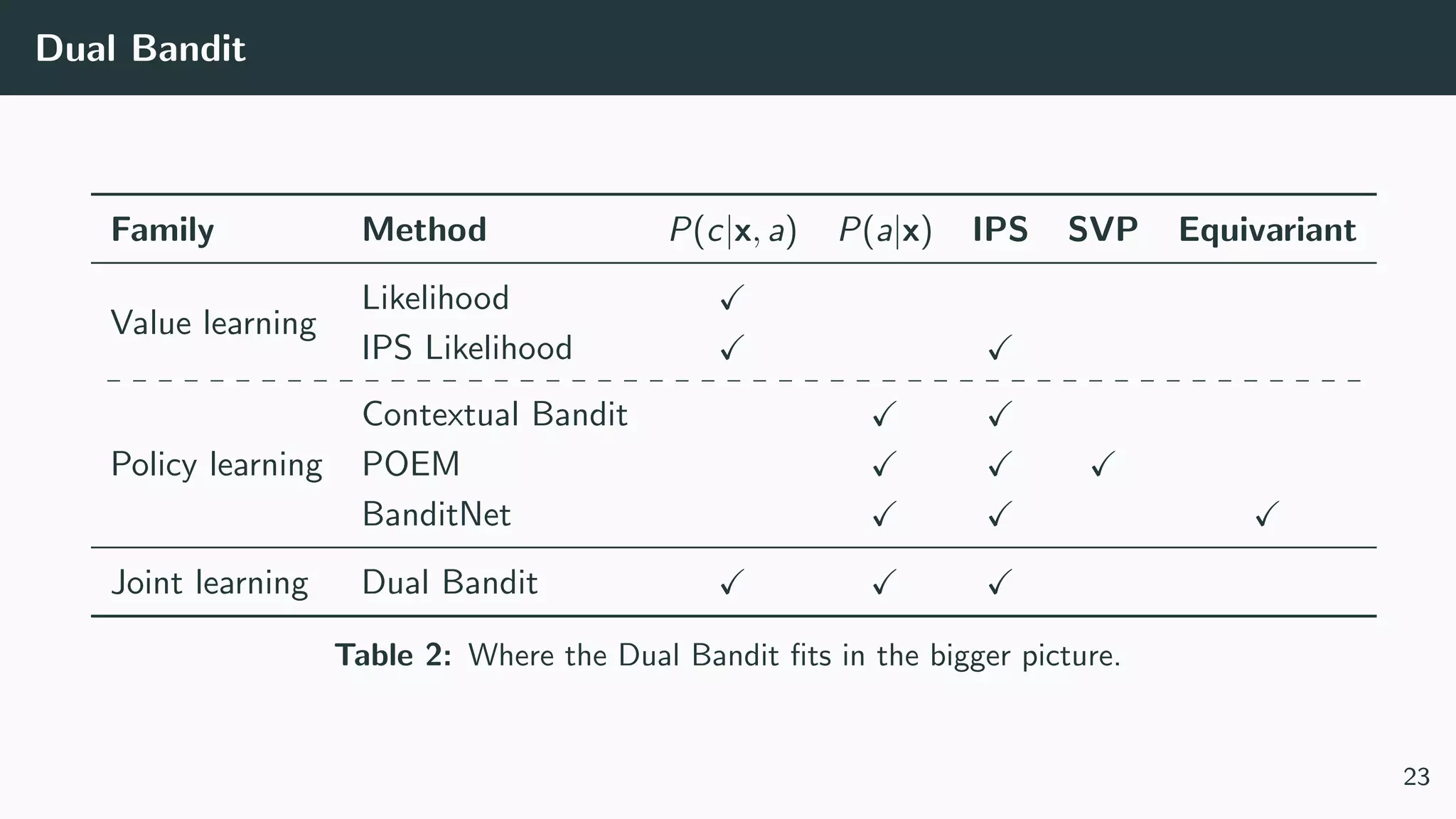
This document discusses counterfactual learning methods aimed at improving recommendation systems by directly learning from logged user feedback rather than relying on traditional collaborative filtering techniques. It introduces various methods, such as the dual bandit approach, which optimize recommendations by combining contextual bandit strategies with value-based learning to handle challenges like stochastic and sparse rewards. Empirical experiments demonstrate the effectiveness of the proposed methods in improving recommendation performance across different logging policies.

![Background
Notation
We assume:
• A stochastic logging policy π0 that describes a probability distribution
over actions, conditioned on the context.
• Dataset of logged feedback D with N tuples (x, a, p, c) with
x ∈ Rn a context vector (historical counts),
a ∈ [1, n] an action identifier,
p ≡ π0(a|x) the logging propensity,
c ∈ {0, 1} the observed reward (click).
8](https://image.slidesharecdn.com/dsmeetupleuven25092019-190926161559/75/Counterfactual-Learning-for-Recommendation-10-2048.jpg)
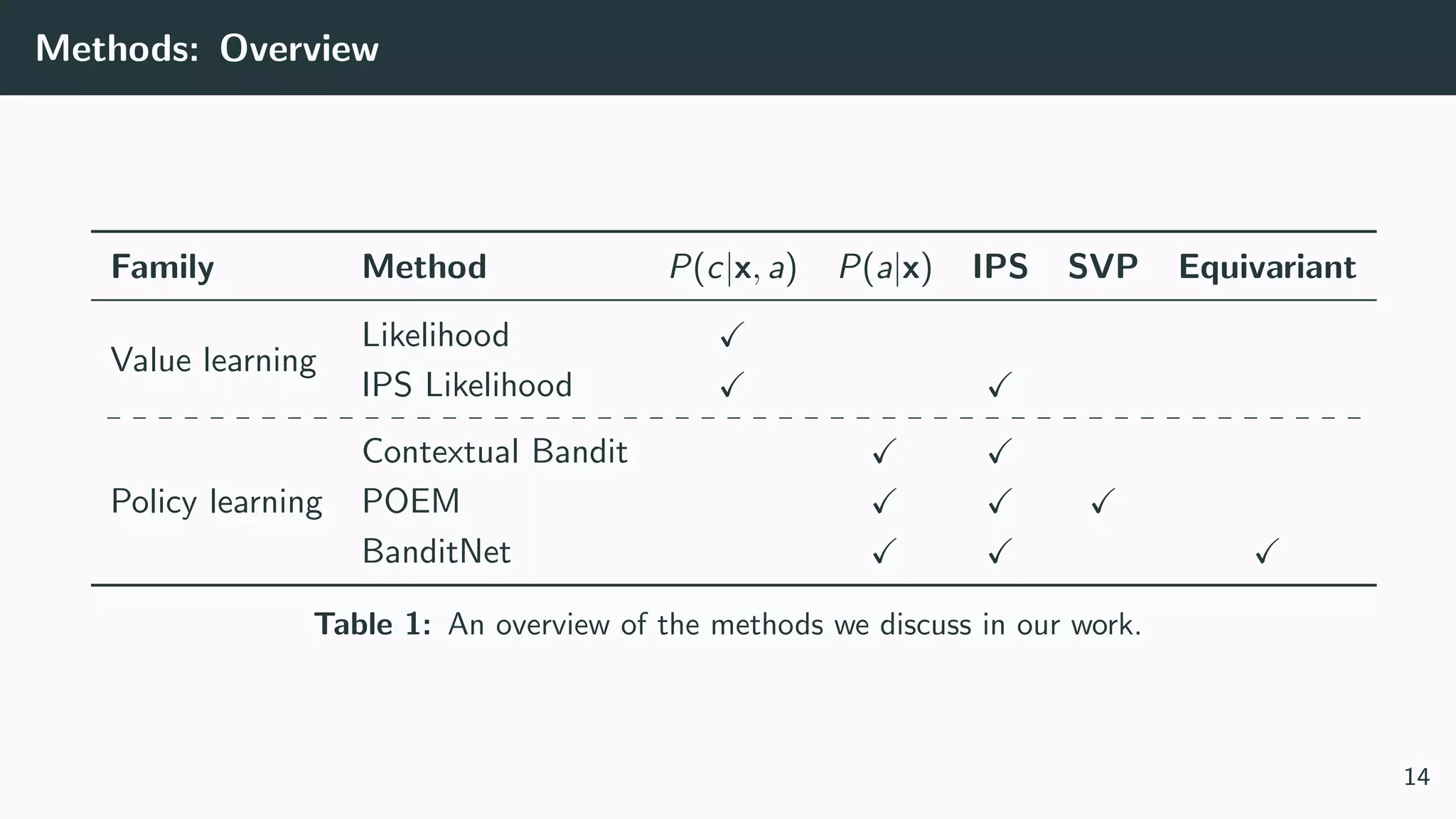
![Methods: Value-based
Likelihood (Logistic Regression) Hosmer Jr. et al. [2013]
Model the probability of a click, conditioned on the action and context:
P(c = 1|x, a) (1)
You can optimise your favourite classifier for this! (e.g. Logistic Regression)
Obtain a decision rule from:
a∗
= arg max
a
P(c = 1|x, a). (2)
9](https://image.slidesharecdn.com/dsmeetupleuven25092019-190926161559/75/Counterfactual-Learning-for-Recommendation-11-2048.jpg)
![Methods: Value-based
IPS-weighted Likelihood Storkey [2009]
Naturally, as the logging policy is trying to achieve some goal (e.g. clicks,
views, dwell time, . . . ), it will take some actions more often than others.
We can use Inverse Propensity Scoring (IPS) to force the error of the fit
to be distributed evenly across the action space.
Reweight samples (x, a) by:
1
π0(a|x)
(3)
10](https://image.slidesharecdn.com/dsmeetupleuven25092019-190926161559/75/Counterfactual-Learning-for-Recommendation-12-2048.jpg)
![Methods: Policy-based
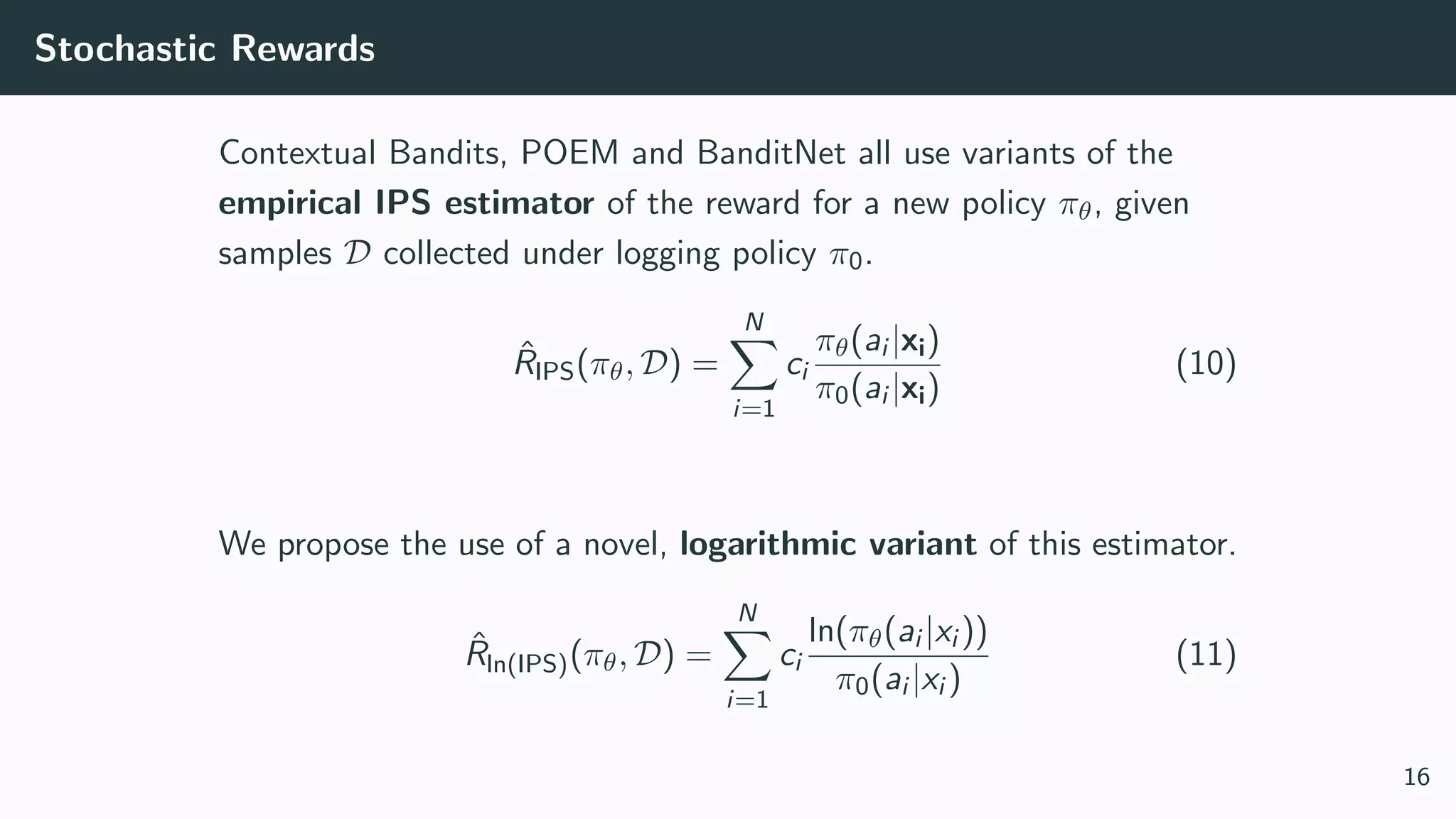
Contextual Bandit Bottou et al. [2013]
Model the counterfactual reward:
“How many clicks would a policy πθ have gotten if it was deployed instead of π0?”
Directly optimise πθ, with θ ∈ Rn×n the model parameters:
P(a|x, θ) = πθ(a|x) (4)
θ∗
= arg max
θ
N
i=1
ci
πθ(ai |xi)
π0(ai |xi)
(5)
a∗
= arg max
a
P(a|x, θ) (6)
11](https://image.slidesharecdn.com/dsmeetupleuven25092019-190926161559/75/Counterfactual-Learning-for-Recommendation-13-2048.jpg)
![Methods: Policy-based
POEM Swaminathan and Joachims [2015a]
IPS estimators tend to have high variance, clip weights and introduce
sample variance penalisation:
θ∗
= arg max
θ
1
N
N
i=1
ci min M,
πθ(ai |xi)
π0(ai |xi)
− λ
Varθ
N
(7)
12](https://image.slidesharecdn.com/dsmeetupleuven25092019-190926161559/75/Counterfactual-Learning-for-Recommendation-14-2048.jpg)
![Methods: Policy-based
NormPOEM Swaminathan and Joachims [2015b]
Variance penalisation is insufficient, use the self-normalised IPS estimator:
θ∗
= arg max
θ
N
i=1 ci
πθ(ai |xi)
π0(ai |xi)
N
i=1
πθ(ai |xi)
π0(ai |xi)
− λ
Varθ
N
(8)
BanditNet Joachims et al. [2018]
Equivalent to a certain optimal translation of the reward:
θ∗
= arg max
θ
N
i=1
(ci − γ)
πθ(ai |xi)
π0(ai |xi)
(9)
13](https://image.slidesharecdn.com/dsmeetupleuven25092019-190926161559/75/Counterfactual-Learning-for-Recommendation-15-2048.jpg)



















![[QCon.ai 2019] People You May Know: Fast Recommendations Over Massive Data](https://cdn.slidesharecdn.com/ss_thumbnails/qconaisf2019-pymk-190424130904-thumbnail.jpg?width=640&height=640&fit=bounds)





























![[DSC Europe 25] Jim Sterne - Adopting Generative AI Capabilities Into the Ent...](https://cdn.slidesharecdn.com/ss_thumbnails/sxhpofuorcagxsaulkmt-3-251204082258-7e66bc48-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Boris Perkovic - Lost in performance.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/uq5hrp7vsuahqkxzifux-1-251204082258-fd2ee09d-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Marija Vlajkovic & Andrea Radonjanin - Integration of AI tool...](https://cdn.slidesharecdn.com/ss_thumbnails/qf1jrglttoc3bm8s3aop-final-integration-of-ai-tools-251208151905-394f3a6a-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Andy Cotgreave - Nothing is new in analytics.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/mba4vzcurvoh5lfrd5zw-6-251205194645-341bbbbe-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Max Talanov - Non digital NNs.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/wif8tr3gtua74qvtopke-non-digital-nns-251205090438-26b0eea6-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Dragana Ilic - AI for Big Data in Astronomy.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/8palya86qaatvjhva1ms-2-dragana-ilic-ai-ilic-251208151906-652b819c-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Bogdan Daniel Maruneac - AI - It starts with you.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/odov3snhrcqs9hx5ny2n-4-251205085715-f1daacfe-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Goran Obradovic - The Rise of Sovereign AI: Building the Regi...](https://cdn.slidesharecdn.com/ss_thumbnails/7nw2xxixrxqdxvrb5wca-6-251205085714-ab09a2ac-thumbnail.jpg?width=640&height=640&fit=bounds)


