The document outlines key computer architecture formulas and principles, including performance metrics such as CPU time, Amdahl's Law, and memory access times. It discusses the importance of domain-specific architectures in leveraging the slowdown of Moore's Law and the evolving landscape of computer architecture. Additionally, it highlights updates in the sixth edition of 'Computer Architecture: A Quantitative Approach,' emphasizing newly incorporated technology advancements and real-world applications.
















![[10] Less than 5 min (to read and understand)
[15] 5–15 min for a full answer
[20] 15–20 min for a full answer
[25] 1 h for a full written answer
[30] Short programming project: less than 1 full day of
programming
[40] Significant programming project: 2 weeks of elapsed time
[Discussion] Topic for discussion with others
Solution
s to the case studies and exercises are available for instructors
who
register at textbooks.elsevier.com.
Supplemental Materials
A variety of resources are available online at
https://www.elsevier.com/books/
computer-architecture/hennessy/978-0-12-811905-1, including
the following:](https://image.slidesharecdn.com/computerarchitectureformulas1-221225184204-817ac276/85/Computer-Architecture-Formulas1-CPU-time-Instru-docx-37-320.jpg)

![New materials and links to other resources available on the Web
will be added
on a regular basis.
Helping Improve This Book
Finally, it is possible to make money while reading this book.
(Talk about cost per-
formance!) If you read the Acknowledgments that follow, you
will see that we
went to great lengths to correct mistakes. Since a book goes
through many print-
ings, we have the opportunity to make even more corrections. If
you uncover any
remaining resilient bugs, please contact the publisher by
electronic mail
([email protected]).
We welcome general comments to the text and invite you to
send them to a
separate email address at [email protected]
Concluding Remarks
Once again, this book is a true co-authorship, with each of us
writing half the chap-](https://image.slidesharecdn.com/computerarchitectureformulas1-221225184204-817ac276/85/Computer-Architecture-Formulas1-CPU-time-Instru-docx-39-320.jpg)
![ters and an equal share of the appendices.We can’t imagine how
long it would have
taken without someone else doing half the work, offering
inspiration when the task
seemed hopeless, providing the key insight to explain a difficult
concept, supply-
ing over-the-weekend reviews of chapters, and commiserating
when the weight of
our other obligations made it hard to pick up the pen.
Thus, once again, we share equally the blame for what you are
about to read.
John Hennessy ■ David Patterson
Preface ■ xxiii
mailto:[email protected]
mailto:[email protected]
mailto:[email protected]
mailto:[email protected]
This page intentionally left blank](https://image.slidesharecdn.com/computerarchitectureformulas1-221225184204-817ac276/85/Computer-Architecture-Formulas1-CPU-time-Instru-docx-40-320.jpg)



















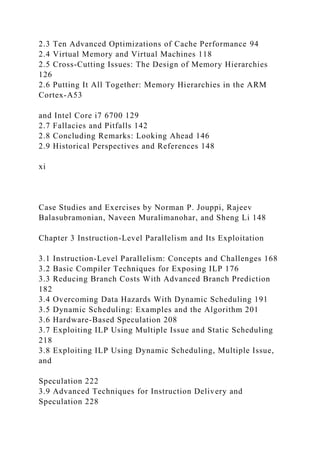
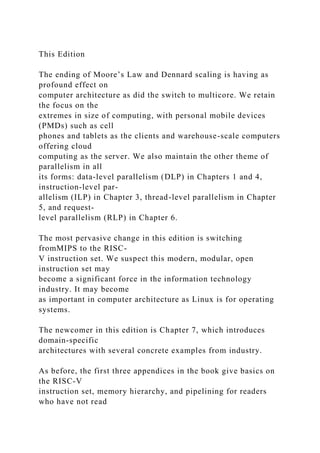
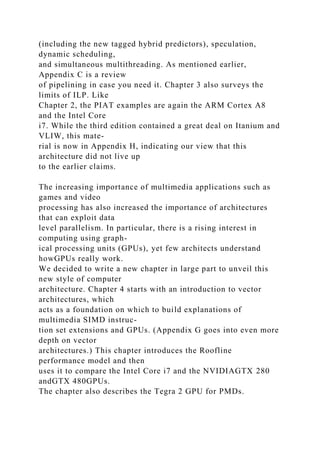
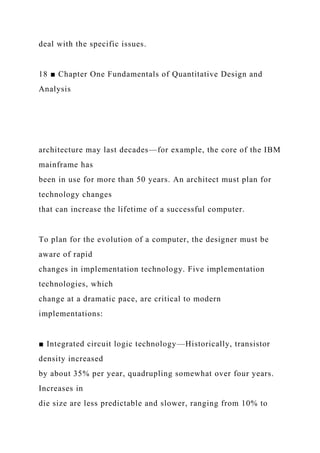
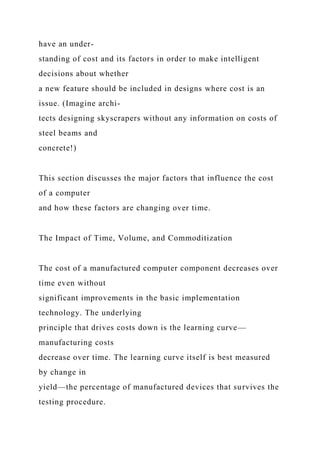
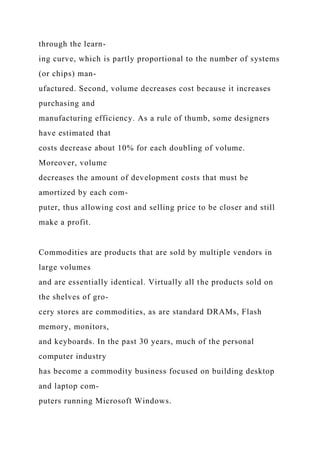
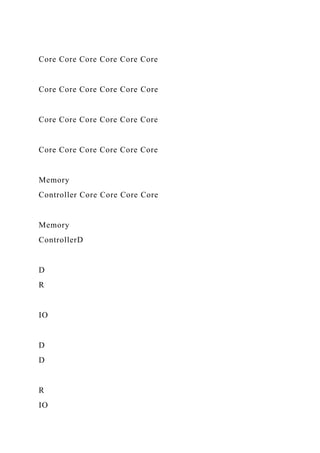
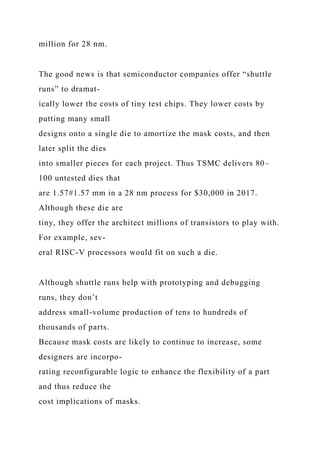
![opcodeimm [4:0]
imm [4:1|11]
rs1
rs1
rs2
rs2
funct3
funct3
imm [11:5]
opcoderdrs1 funct3imm [11:0]
opcoderdimm [31:12]
J-typeopcoderdimm [20|10:1|11|19:12]](https://image.slidesharecdn.com/computerarchitectureformulas1-221225184204-817ac276/85/Computer-Architecture-Formulas1-CPU-time-Instru-docx-118-320.jpg)
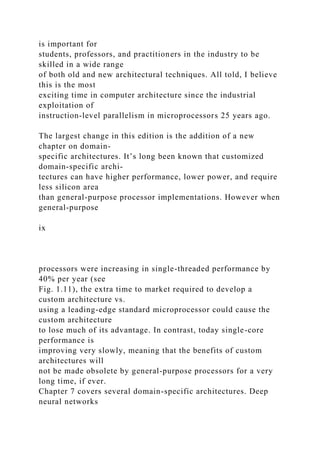
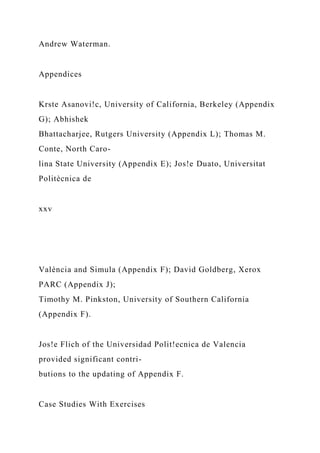
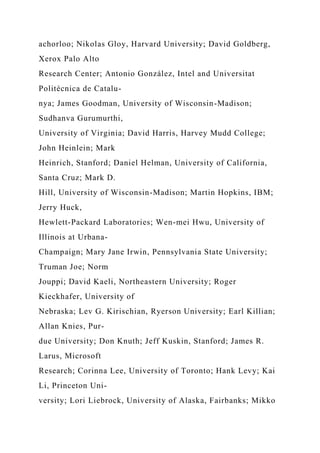
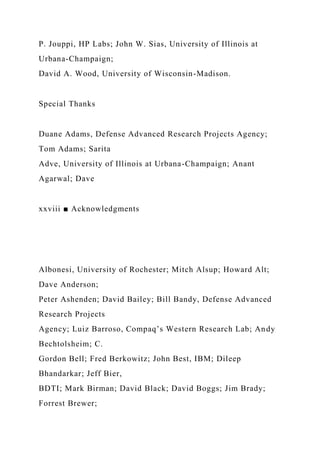
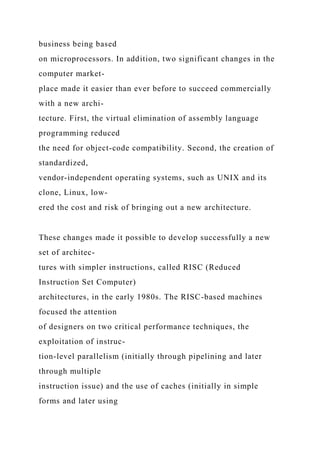
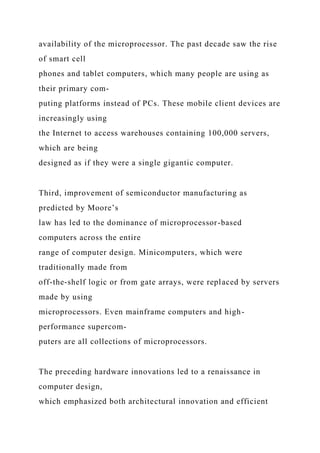
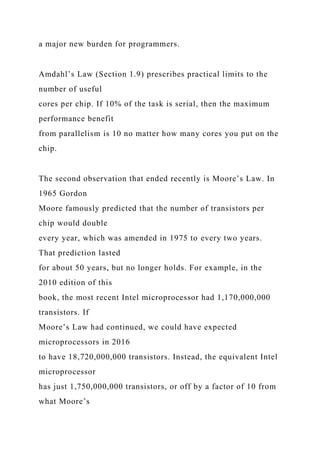
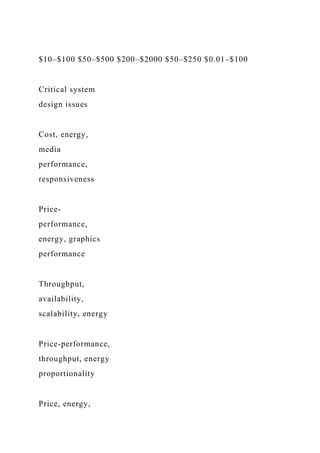
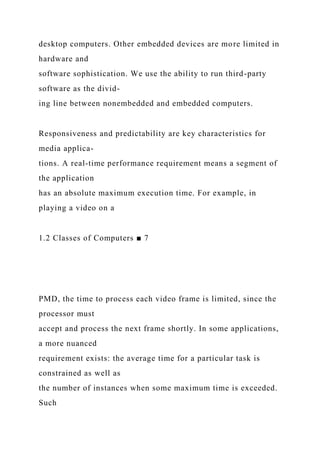
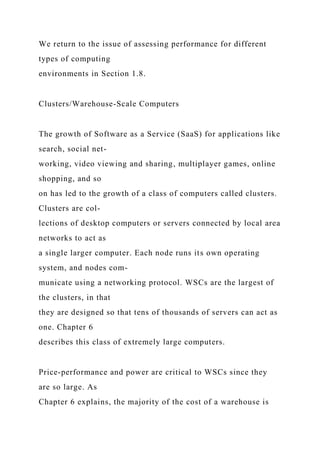
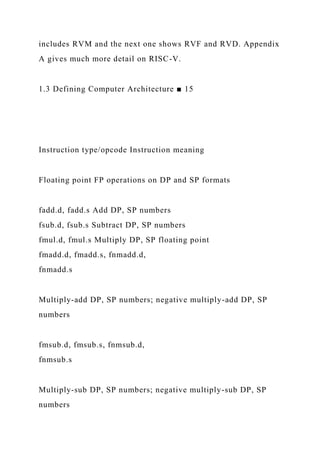
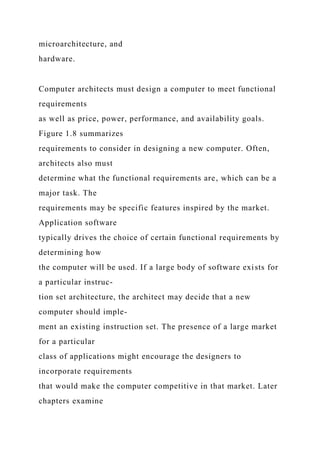
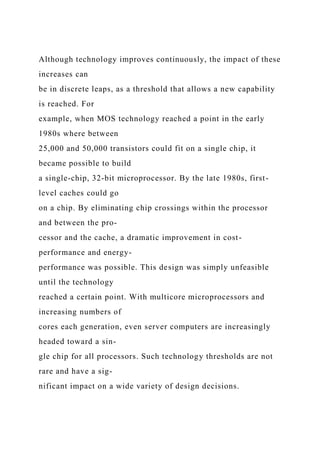
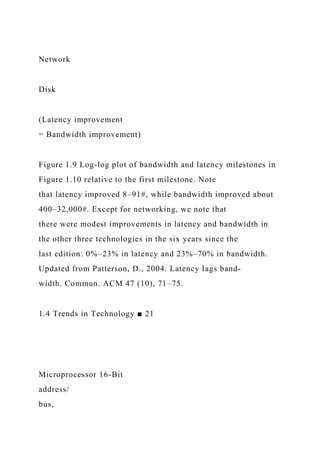
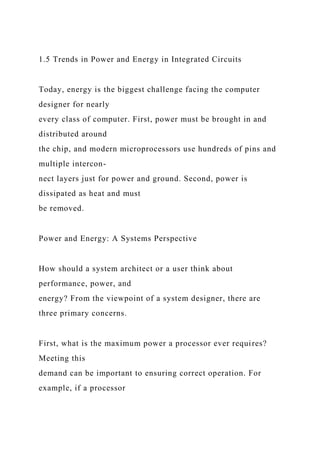
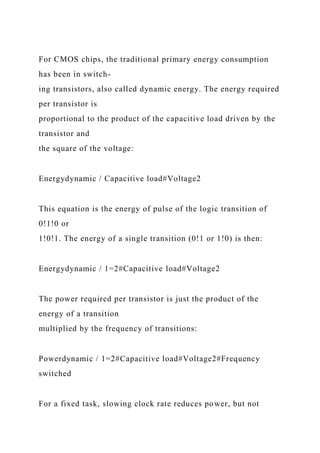
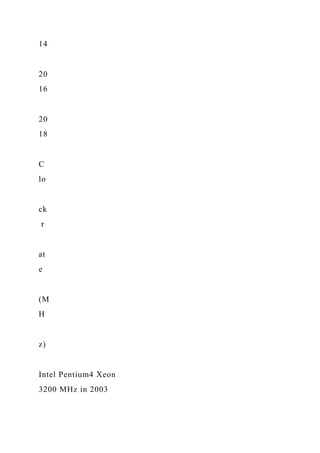
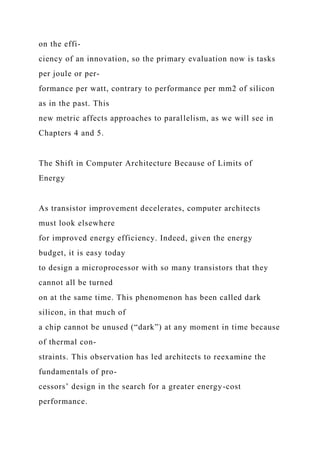
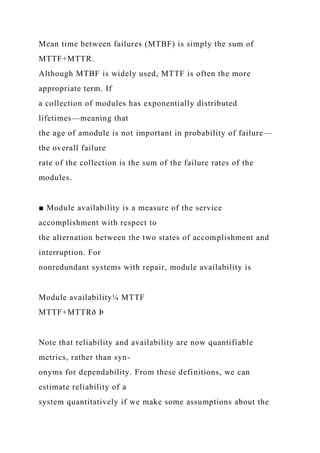
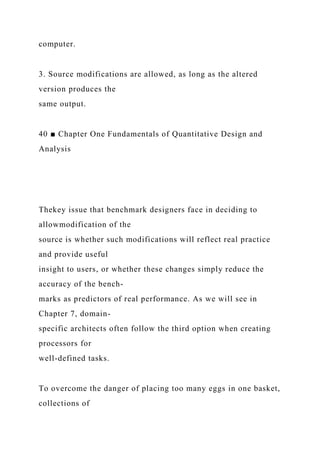
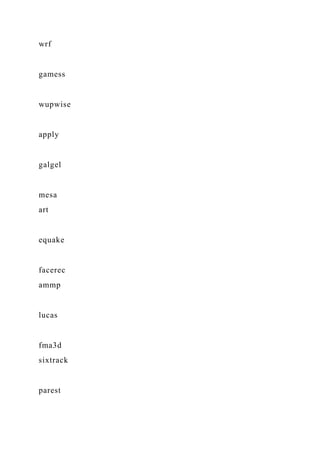
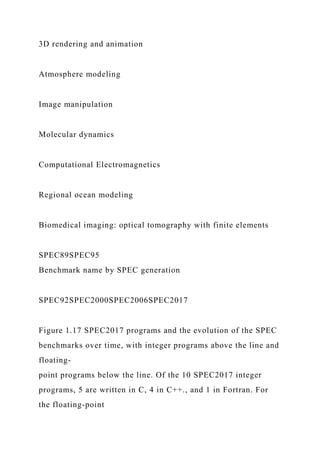
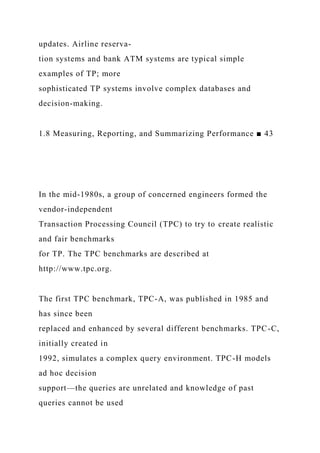
![B-typeopcodeimm [10:5]imm [12]
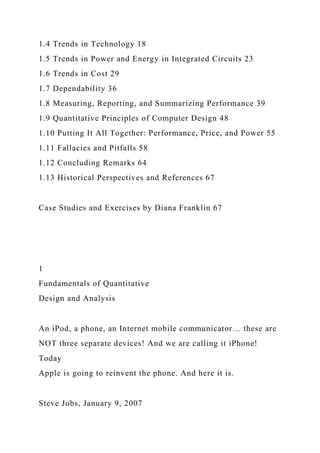
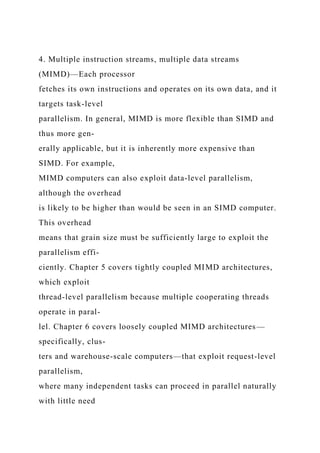
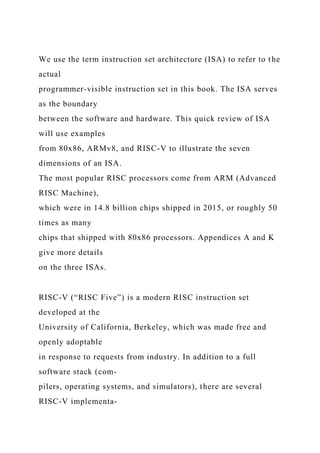
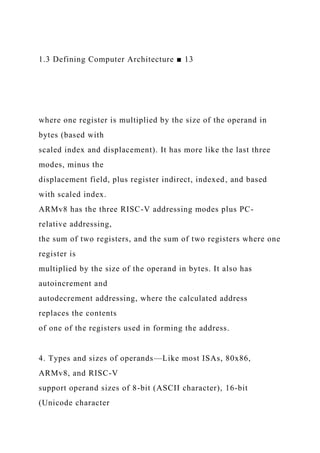
Figure 1.7 The base RISC-V instruction set architecture
formats. All instructions are 32 bits long. The R format is for
integer register-to-register operations, such as ADD, SUB, and
so on. The I format is for loads and immediate oper-
ations, such as LD and ADDI. The B format is for branches and
the J format is for jumps and link. The S format is for
stores. Having a separate format for stores allows the three
register specifiers (rd, rs1, rs2) to always be in the same
location in all formats. The U format is for the wide immediate
instructions (LUI, AUIPC).
16 ■ Chapter One Fundamentals of Quantitative Design and
Analysis
The other challenges facing the computer architect beyond ISA
design are par-
ticularly acute at the present, when the differences among
instruction sets are small
and when there are distinct application areas. Therefore,
starting with the fourth
edition of this book, beyond this quick review, the bulk of the](https://image.slidesharecdn.com/computerarchitectureformulas1-221225184204-817ac276/85/Computer-Architecture-Formulas1-CPU-time-Instru-docx-119-320.jpg)
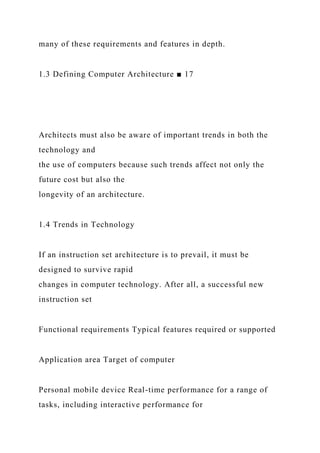

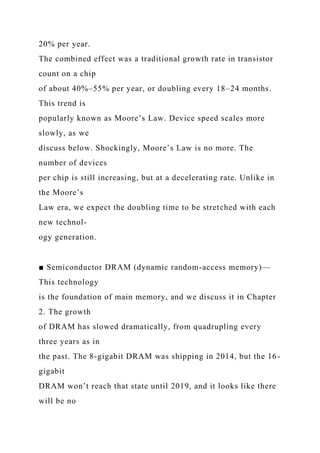


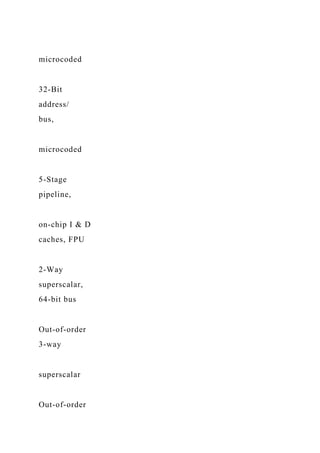

















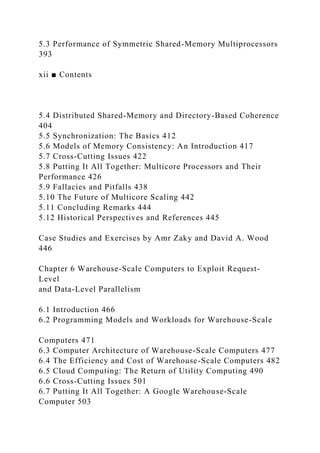
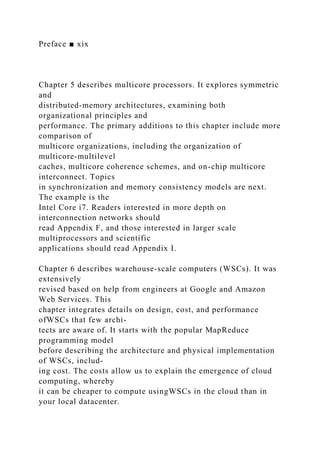
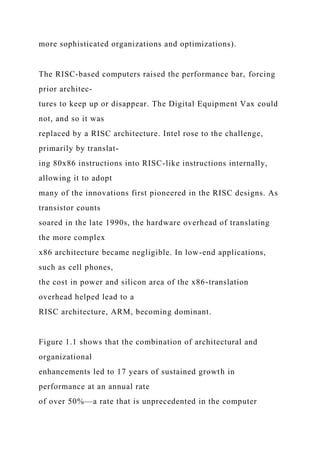
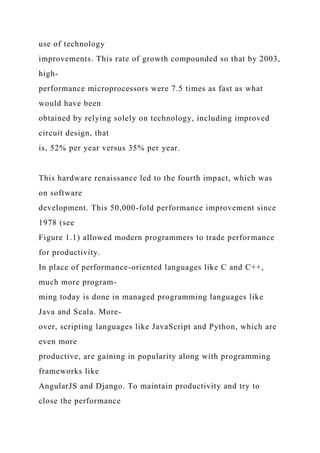
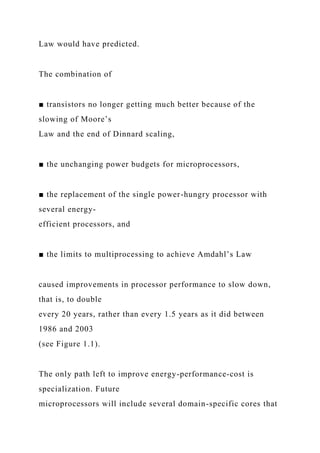
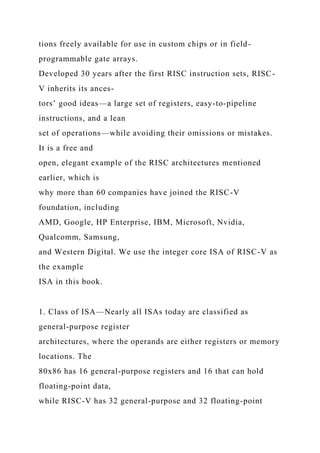
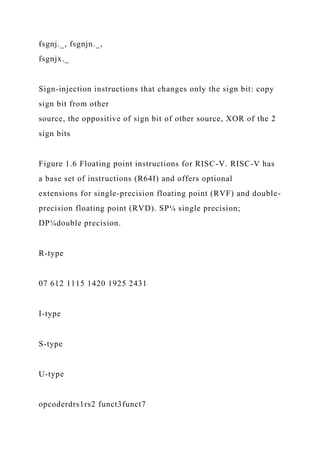
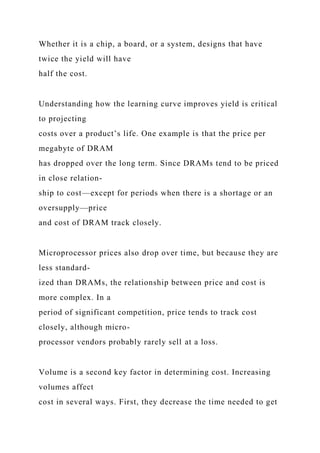
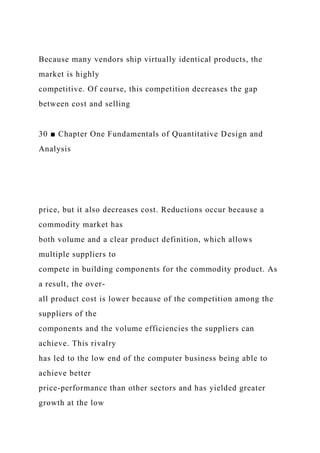
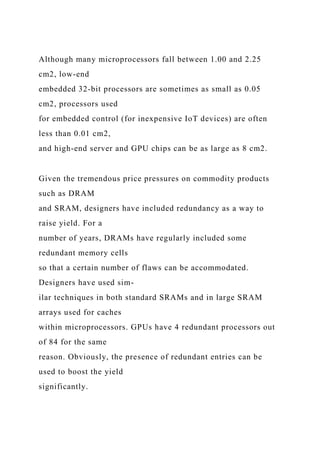
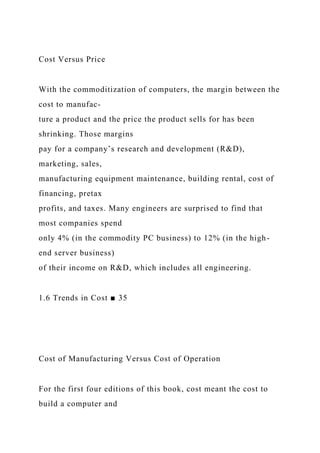
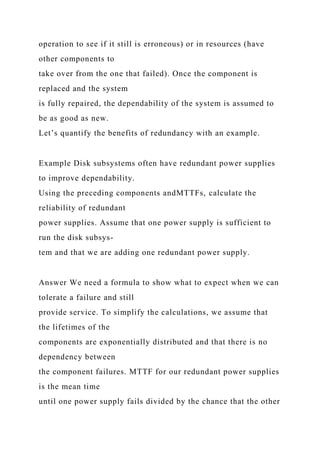
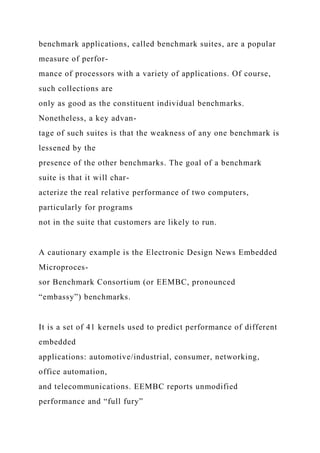
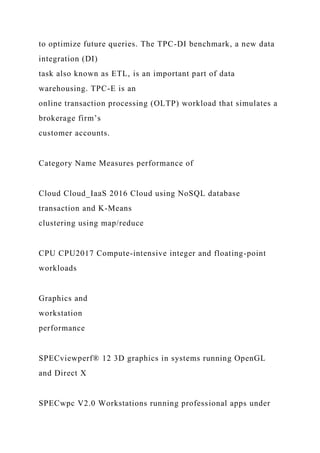
![3495
1640
7700
N/A
N/A
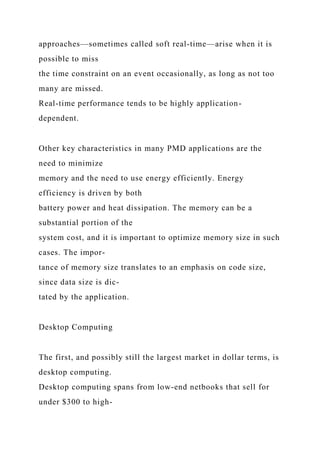
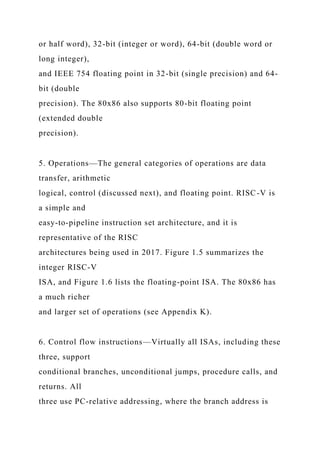
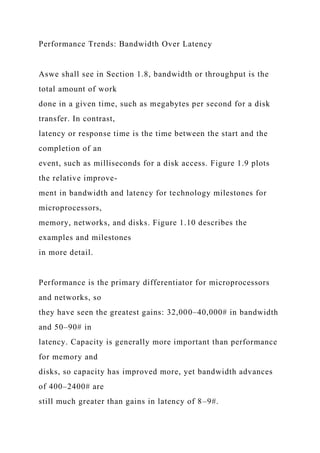
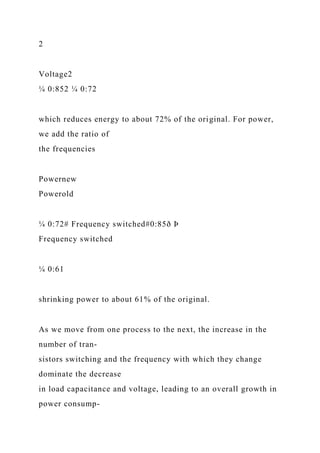
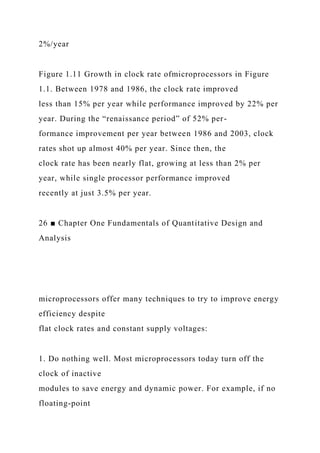
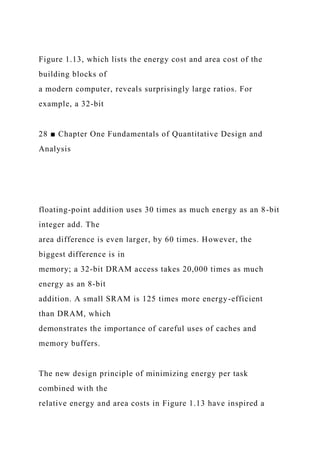
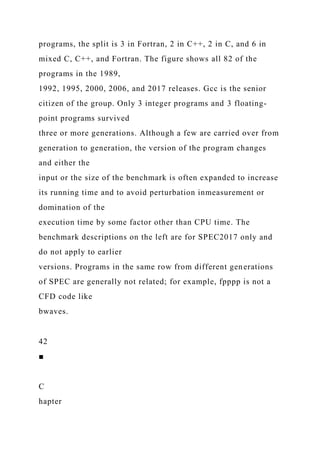
Figure 1.13 Comparison of the energy and die area of arithmetic
operations and energy cost of accesses to SRAM
and DRAM. [Azizi][Dally]. Area is for TSMC 45 nm technology
node.
1.6 Trends in Cost ■ 29
Textbooks often ignore the cost half of cost-performance
because costs change,
thereby dating books, and because the issues are subtle and
differ across industry
segments. Nevertheless, it’s essential for computer architects to](https://image.slidesharecdn.com/computerarchitectureformulas1-221225184204-817ac276/85/Computer-Architecture-Formulas1-CPU-time-Instru-docx-174-320.jpg)



















![[3] Computer_Organization_and_Design_5th (1).pdf](https://cdn.slidesharecdn.com/ss_thumbnails/3computerorganizationanddesign5th1-230929033506-efddda3f-thumbnail.jpg?width=640&height=640&fit=bounds)