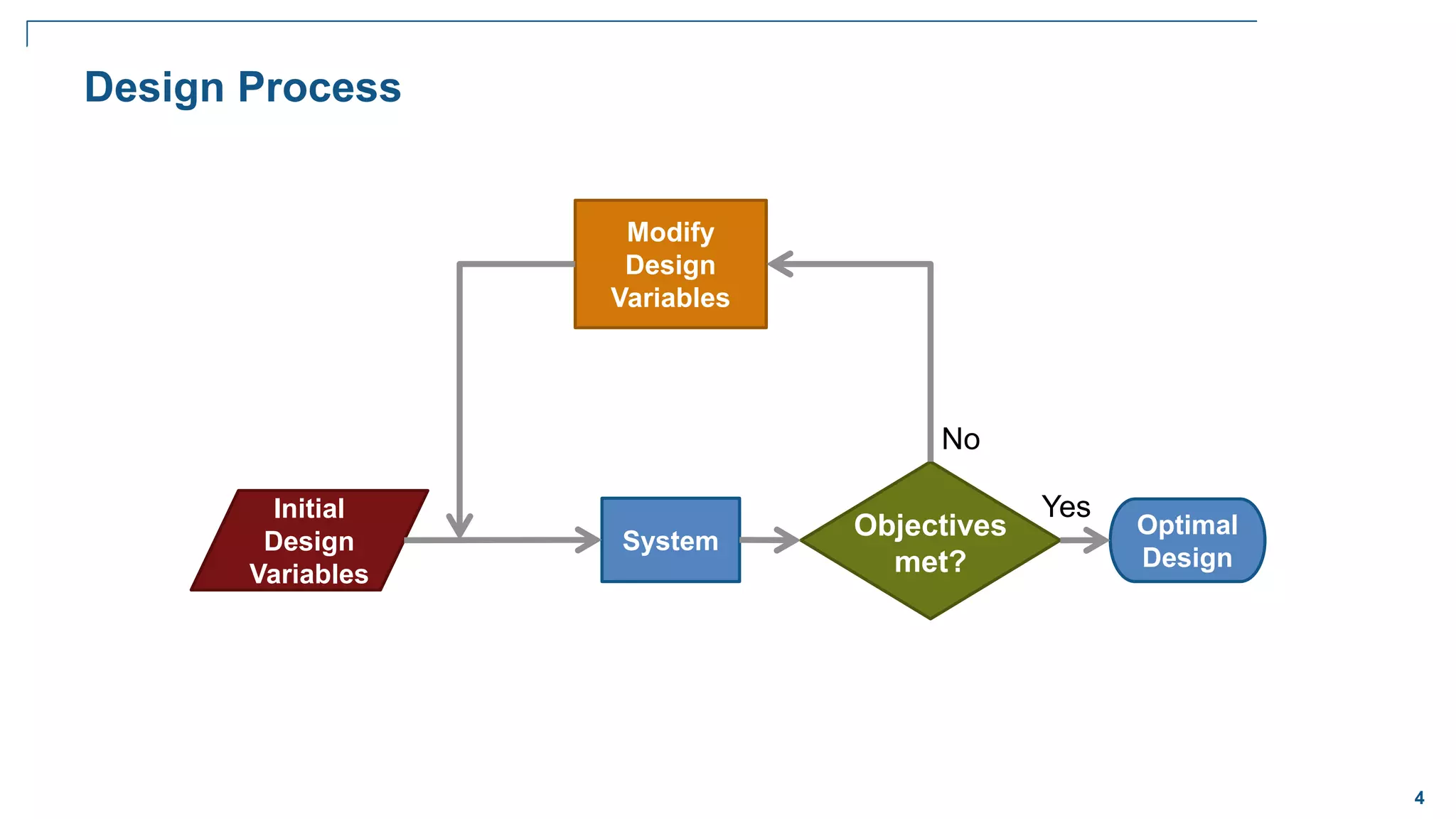
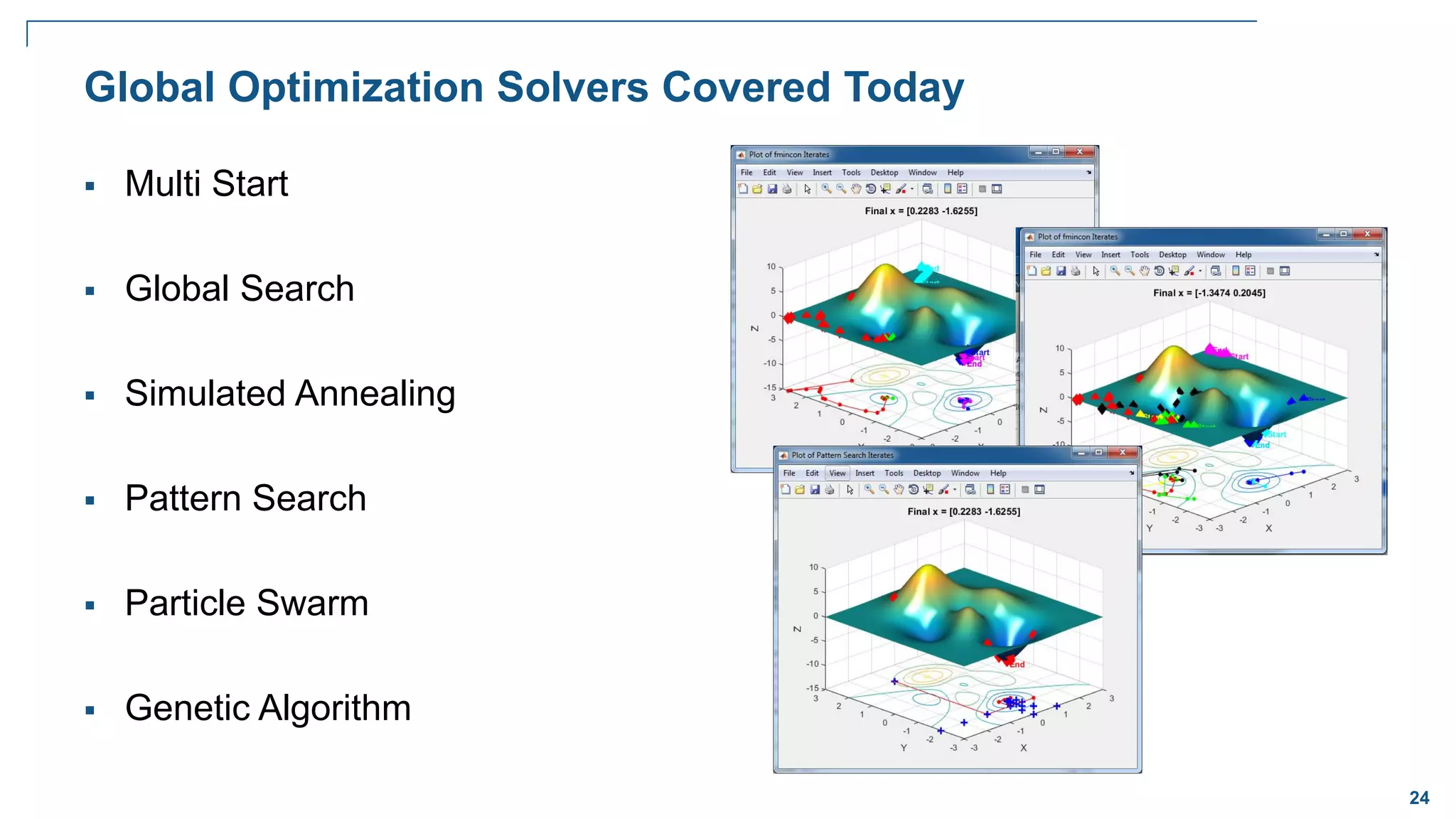
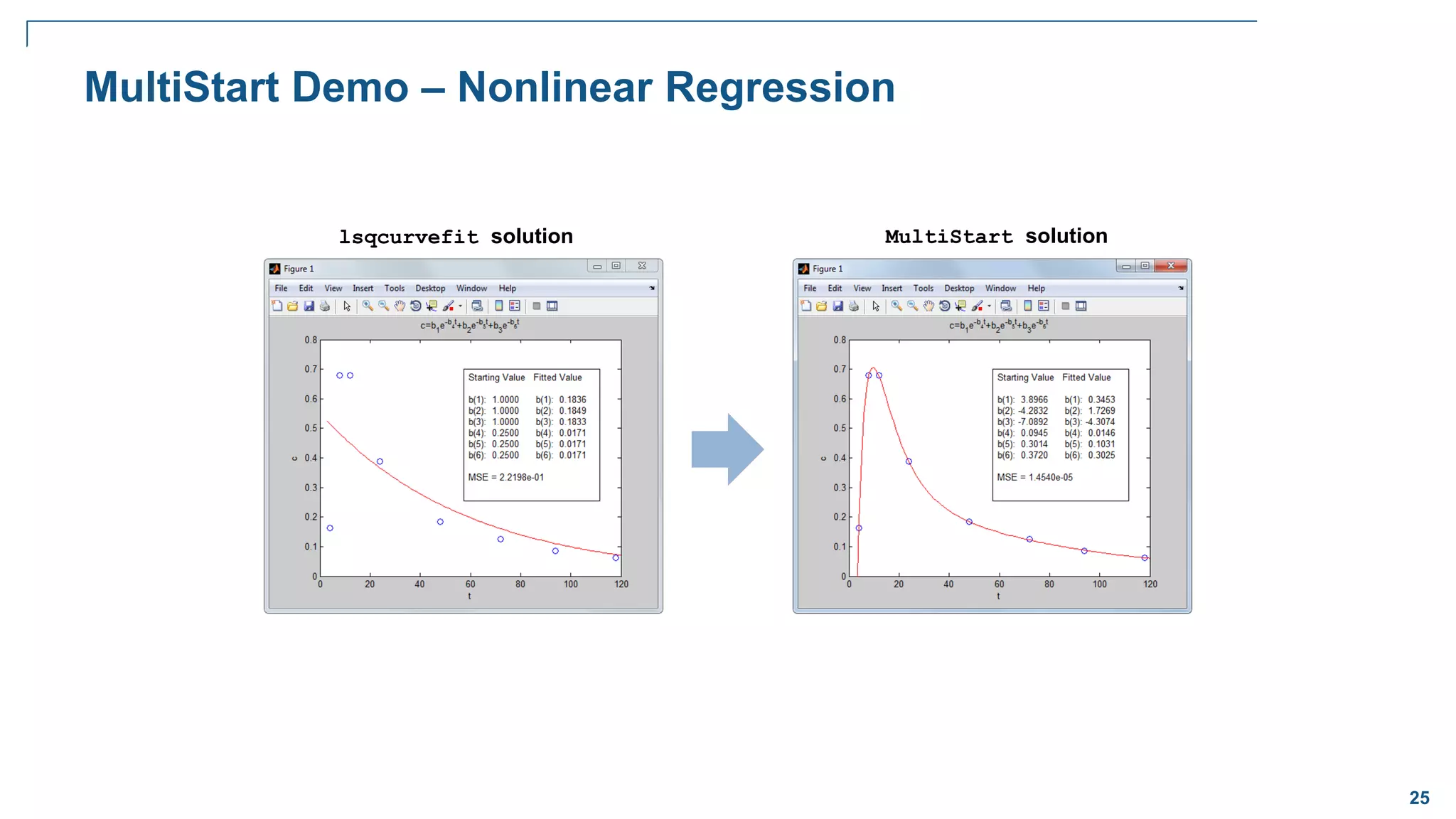
The document discusses various optimization techniques in MATLAB, including least squares minimization, nonlinear optimization, mixed-integer programming, and global optimization. It provides examples of curve fitting, nonlinear function minimization, the traveling salesman problem, and global optimization techniques like multi-start, global search, simulated annealing, and particle swarm optimization.
![9
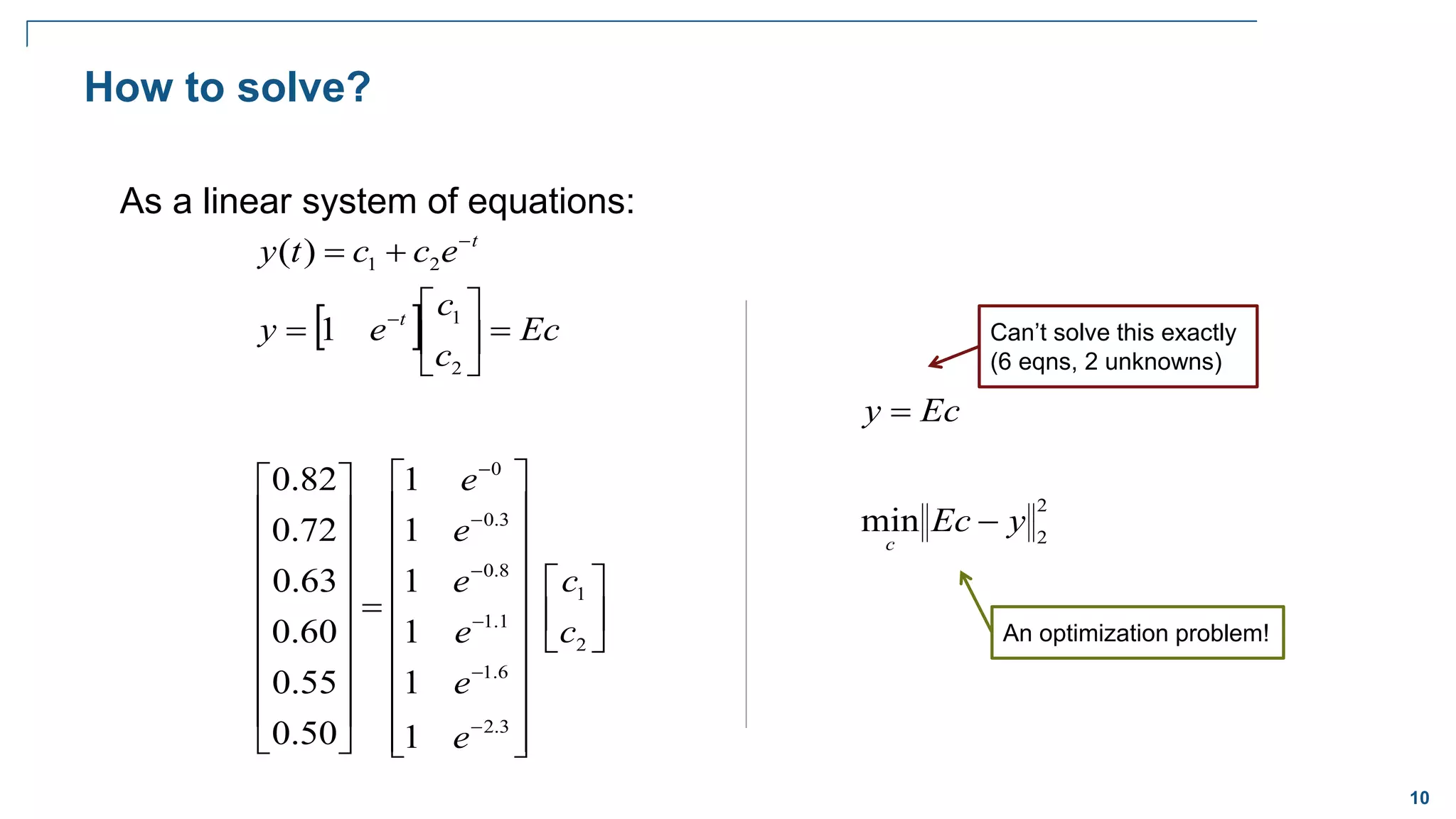
Curve Fitting Demo
Given some data:
Fit a curve of the form:
t
e
c
c
t
y
2
1
)
(
t = [0 .3 .8 1.1 1.6 2.3];
y = [.82 .72 .63 .60 .55 .50];](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-9-2048.jpg)
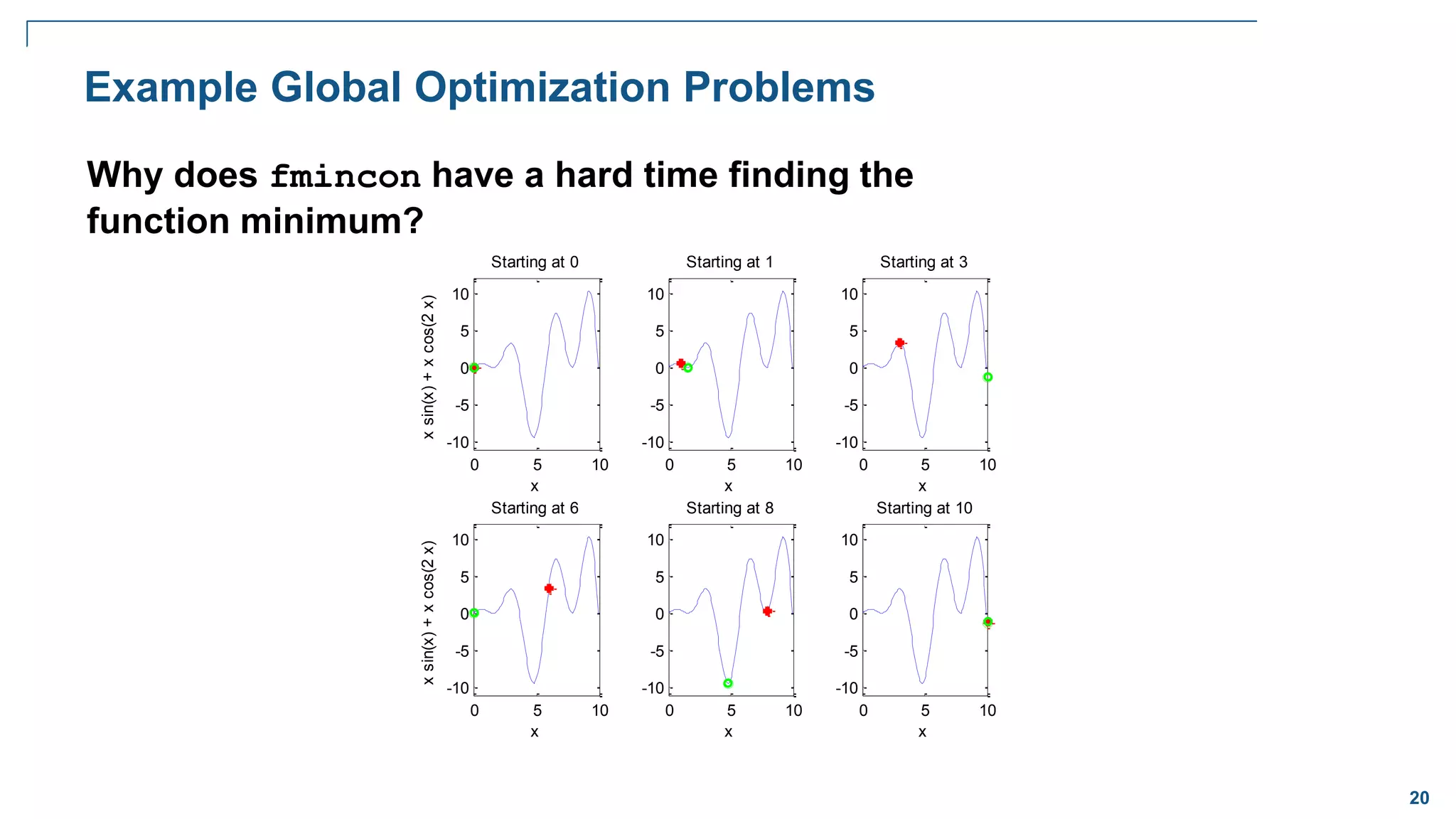
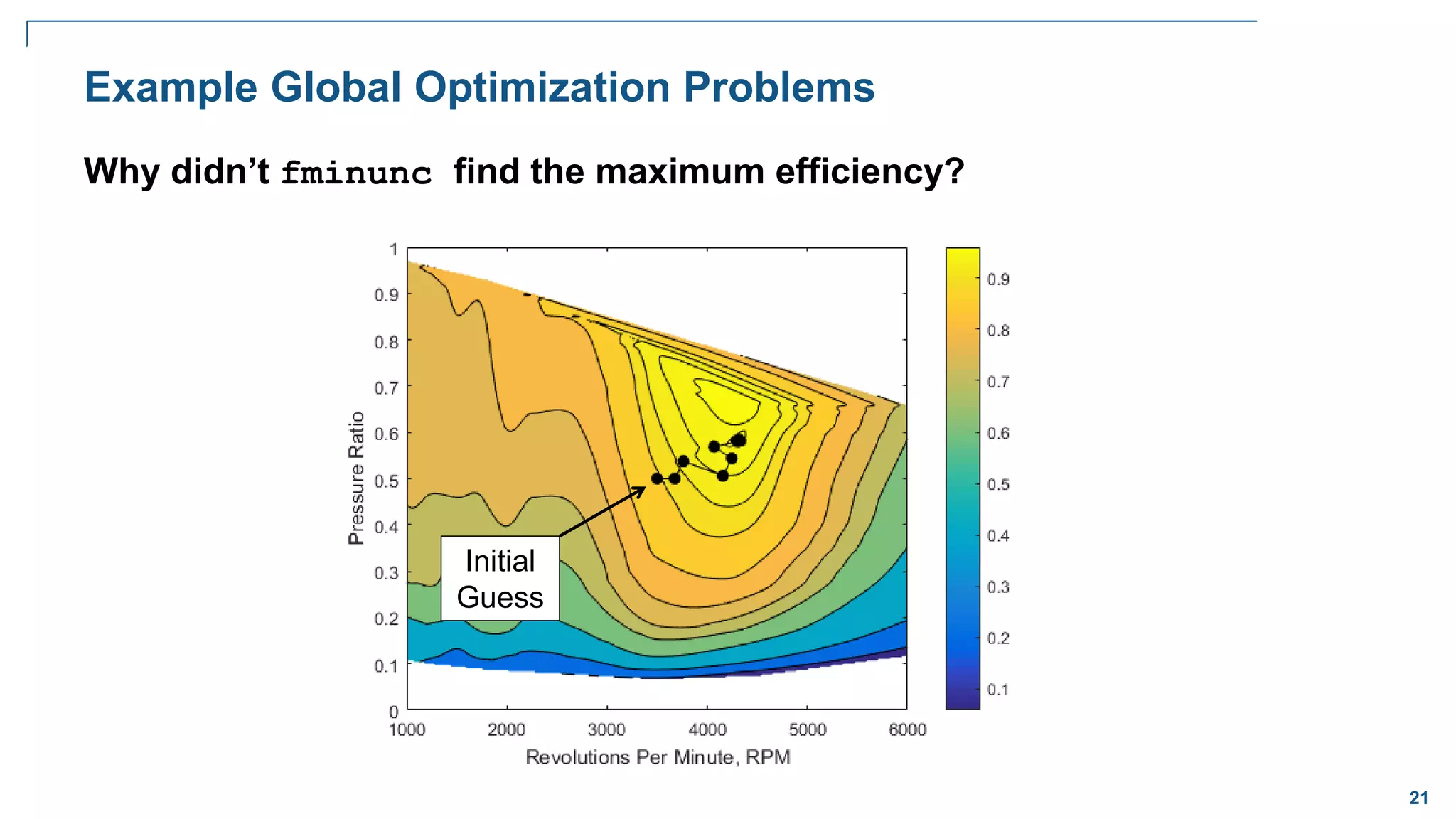
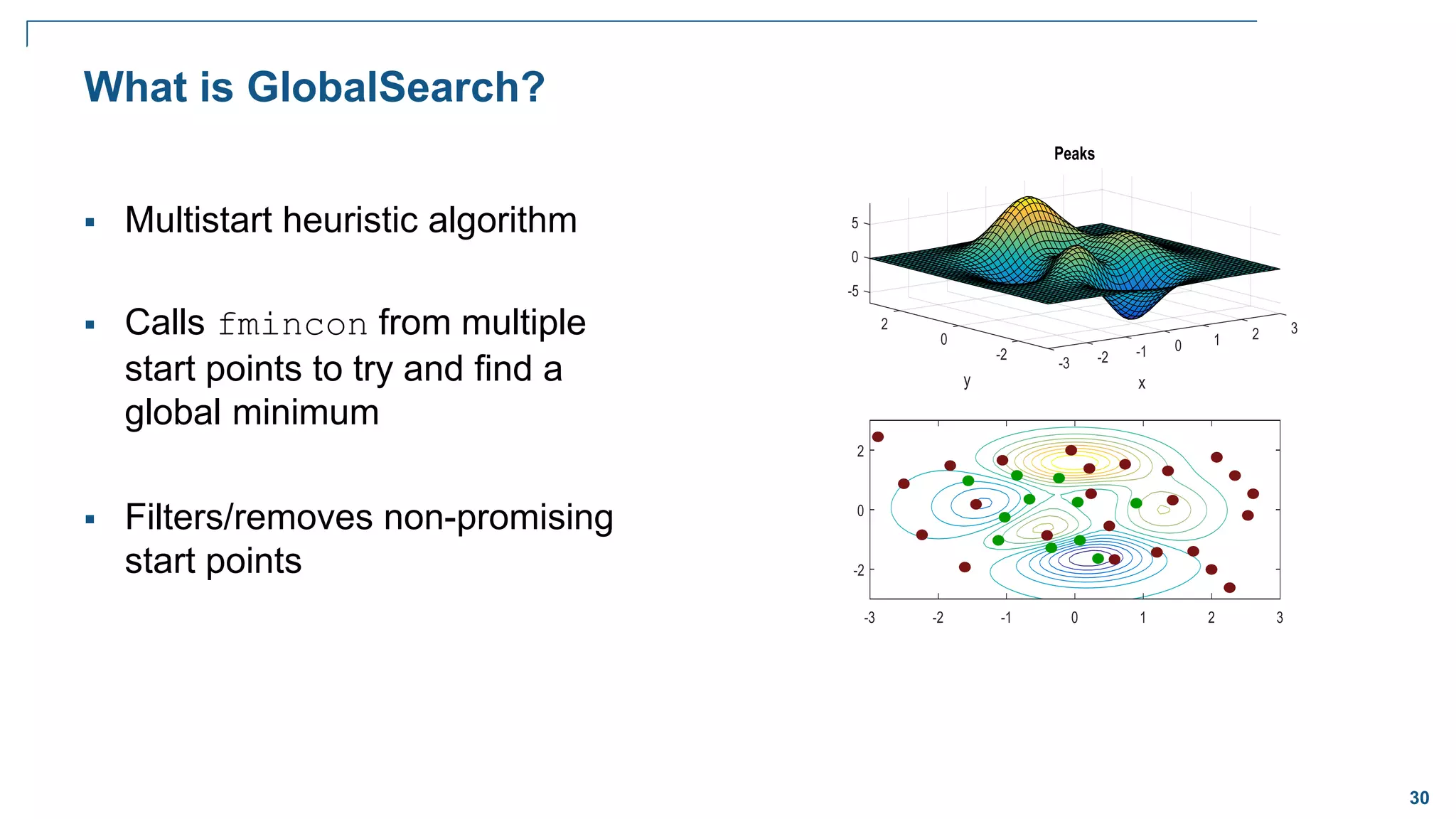
![23
Global Optimization
Goal:
Want to find the lowest/largest value of
the nonlinear function that has many local
minima/maxima
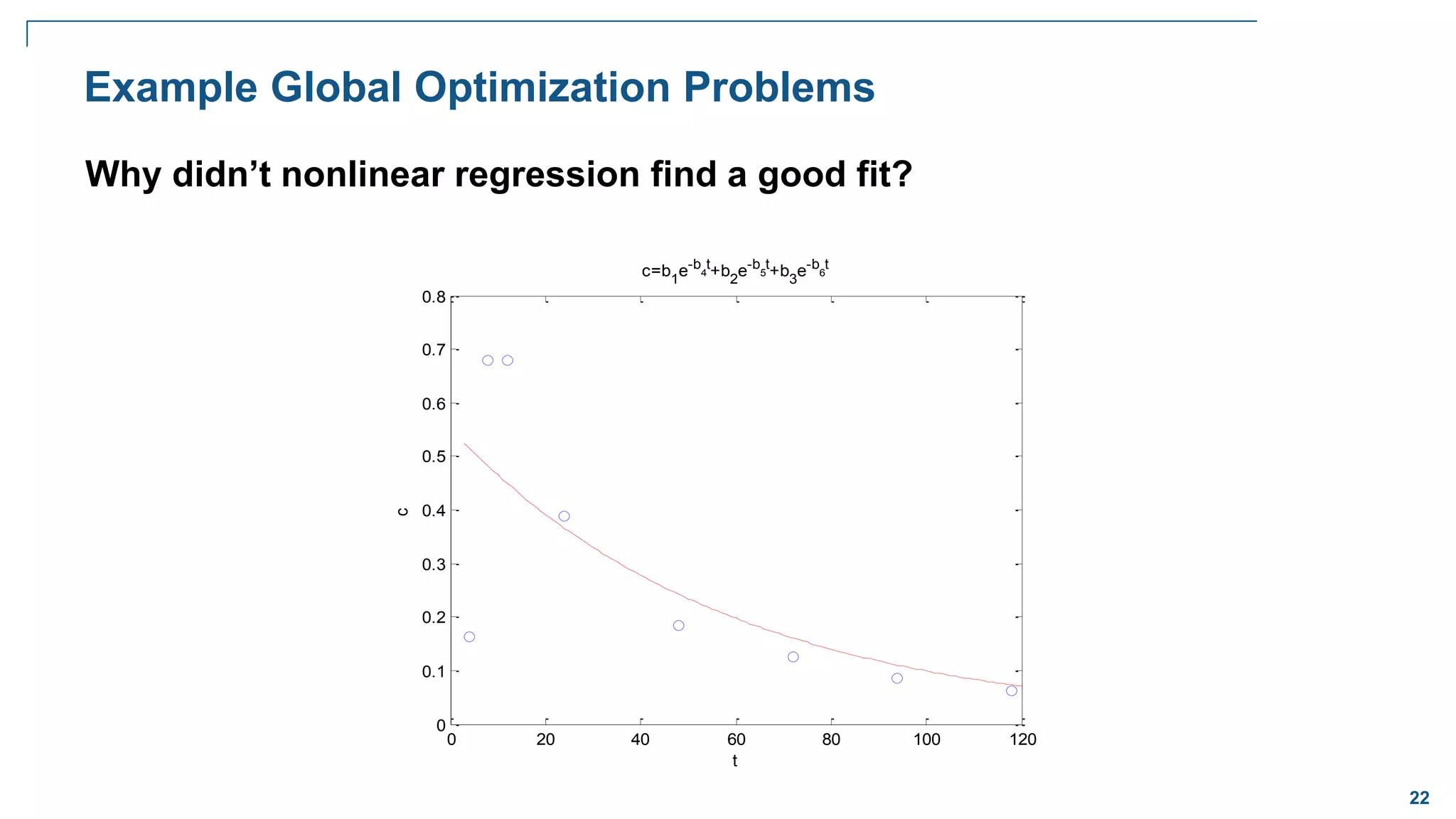
Problem:
Traditional solvers often return one of the
local minima (not the global)
Solution:
A solver that locates globally optimal
solutions
Global Minimum at [0 0]
Rastrigin’s Function](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-23-2048.jpg)
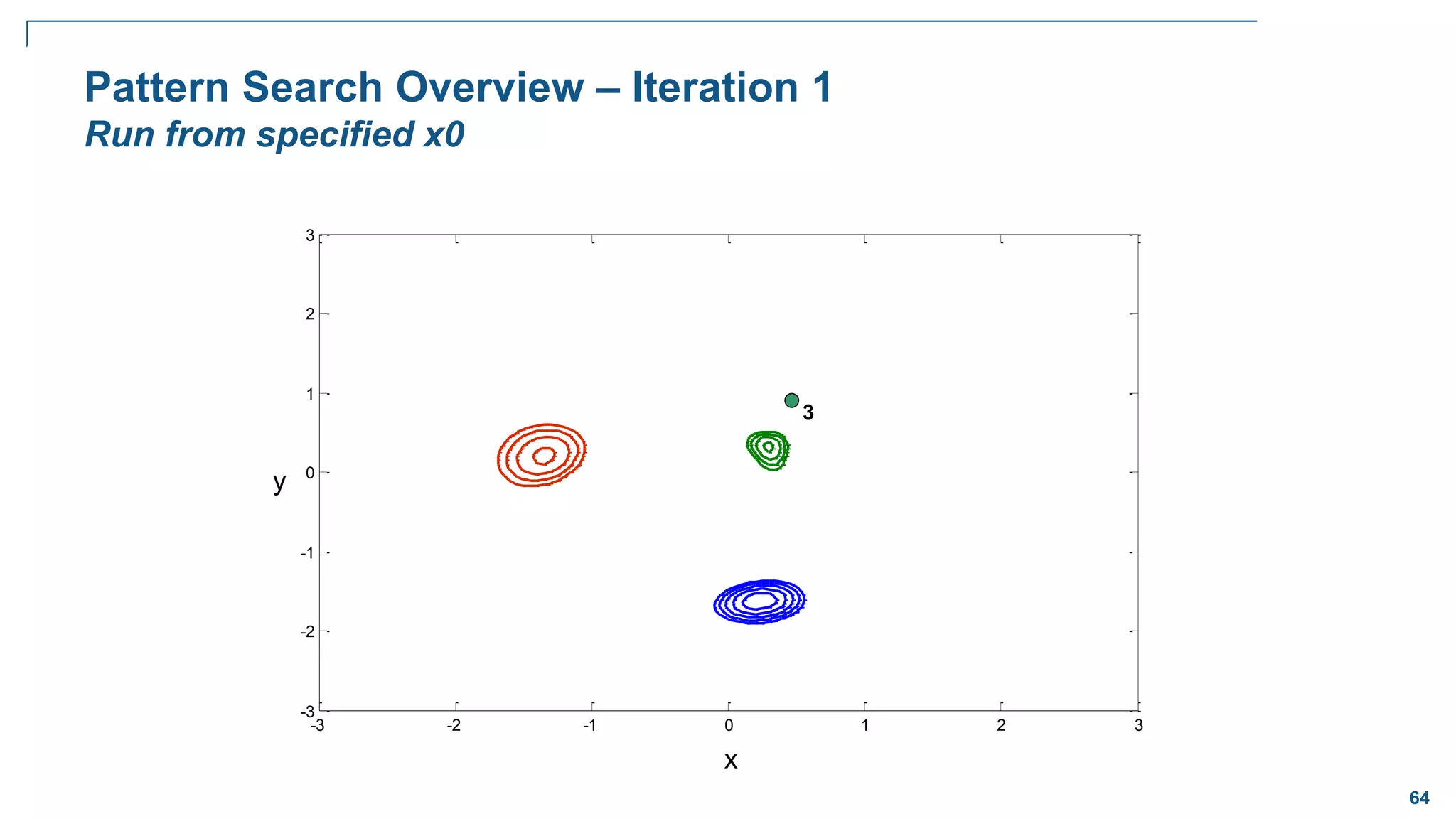
![65
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
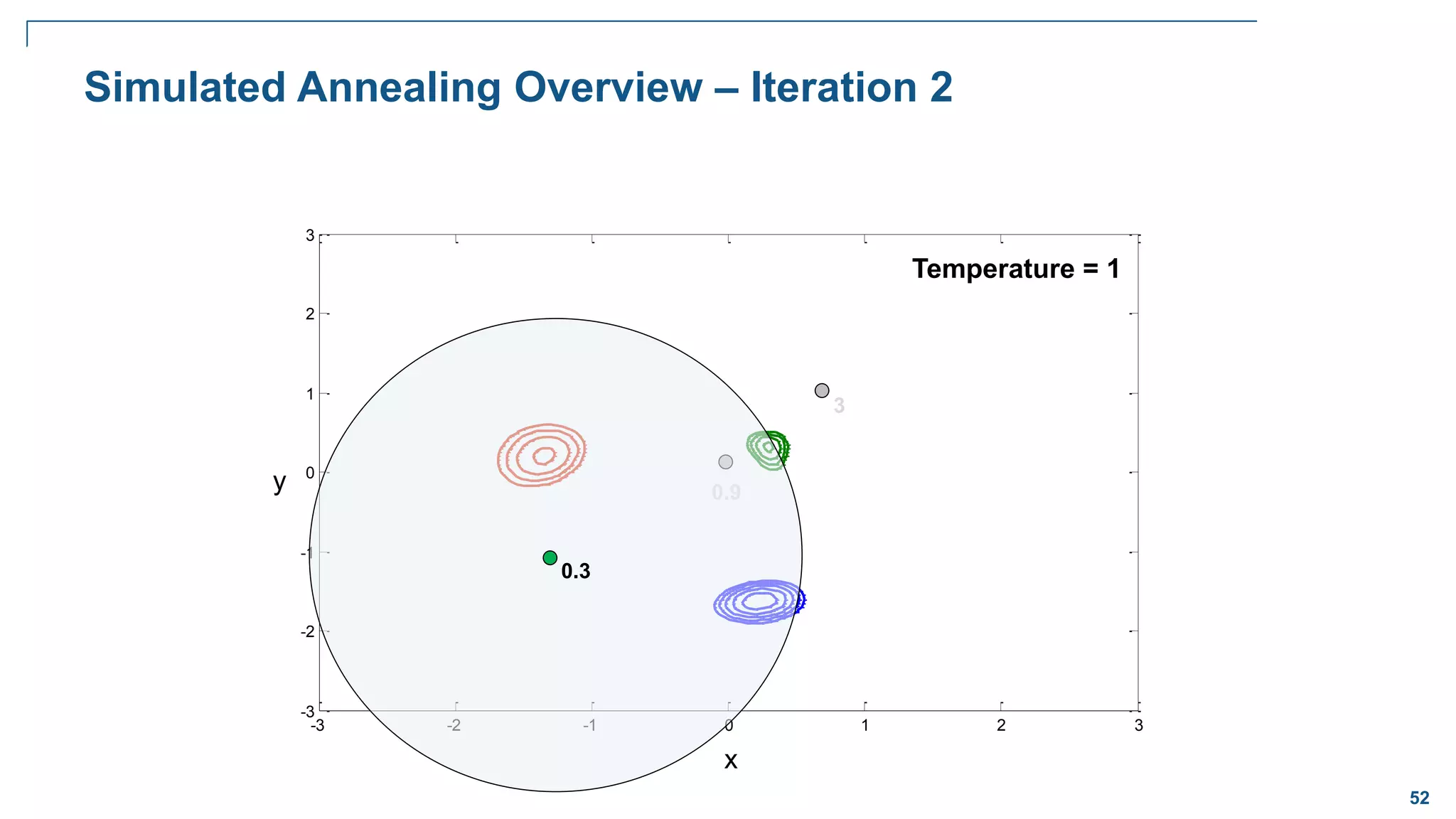
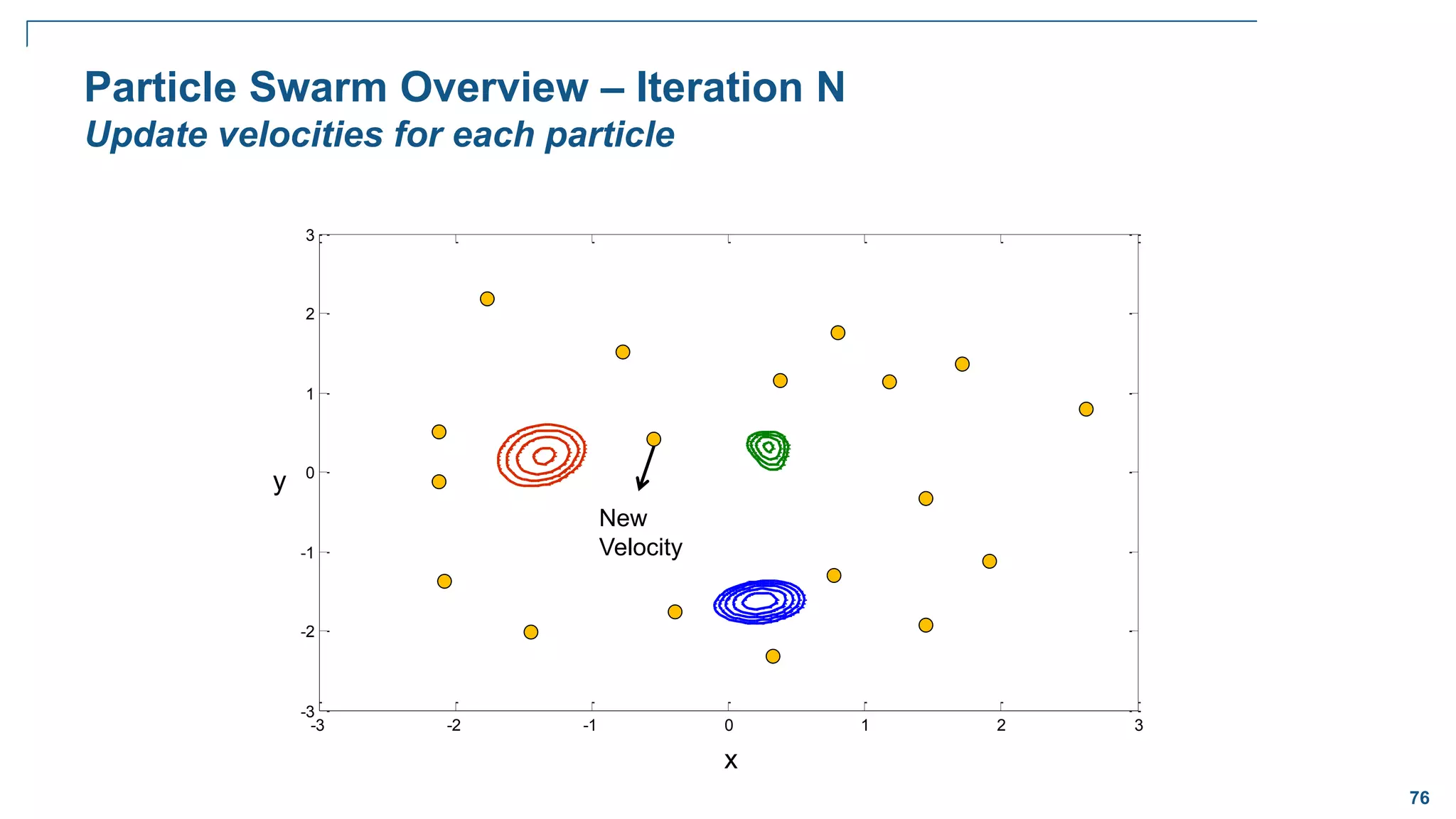
Pattern Search Overview – Iteration 1
Apply pattern vector, poll new points for improvement
x
y
3
Mesh size = 1
Pattern vectors = [1,0], [0,1], [-1,0], [0,-1]
0
_
*
_ x
vector
pattern
size
mesh
Pnew
0
]
0
,
1
[
*
1 x
1.6
0.4
4.6
2.8
First poll successful
Complete Poll (not default)](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-67-2048.jpg)
![66
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Pattern Search Overview – Iteration 2
x
y
3
Mesh size = 2
Pattern vectors = [1,0], [0,1], [-1,0], [0,-1]
1.6
0.4
4.6
2.8
-4
0.3
-2.8
Complete Poll](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-68-2048.jpg)
![67
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Pattern Search Overview – Iteration 3
x
y
3
Mesh size = 4
Pattern vectors = [1,0], [0,1], [-1,0], [0,-1]
1.6
0.4
4.6
2.8
-4
0.3
-2.8](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-69-2048.jpg)
![68
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Pattern Search Overview – Iteration 4
x
y
3
Mesh size = 4*0.5 = 2
Pattern vectors = [1,0], [0,1], [-1,0], [0,-1]
1.6
0.4
4.6
2.8
-4
0.3
-2.8](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-70-2048.jpg)
![82
How Evolution Works – Binary Case
Selection
– Retain the best performing bit strings from one generation to the next. Favor these for
reproduction
– parent1 = [ 1 0 1 0 0 1 1 0 0 0 ]
– parent2 = [ 1 0 0 1 0 0 1 0 1 0 ]
Crossover
– parent1 = [ 1 0 1 0 0 1 1 0 0 0 ]
– parent2 = [ 1 0 0 1 0 0 1 0 1 0 ]
– child = [ 1 0 0 0 0 1 1 0 1 0 ]
Mutation
– parent = [ 1 0 1 0 0 1 1 0 0 0 ]
– child = [ 0 1 0 1 0 1 0 0 0 1 ]](https://image.slidesharecdn.com/cil11optimization3globaloptimization-230919082202-19efda4e/75/CI-L11-Optimization-3-GlobalOptimization-pdf-84-2048.jpg)