Download to read offline
![𝑀𝑇 = 𝑎 + 𝑏
𝐴
𝑊
The Steering Law [Accot+, CHI '97, '99]
3
W
A
A
W
Movement time
Path length
Path width
Simple form,
constant-width paths
General form,
arbitrary paths
s
W(s)
𝑀𝑇 = 𝑎 + 𝑏
𝐶
𝑑𝑠
𝑊 𝑠](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-3-2048.jpg)
![Derived Steering Models
4
Narrowing path
[Accot+, CHI '97]
Spiral path
[Accot+, CHI '97]
WL
A
WR
A
WRWL
Widening path
[Yamanaka+, CHI '16]](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-4-2048.jpg)
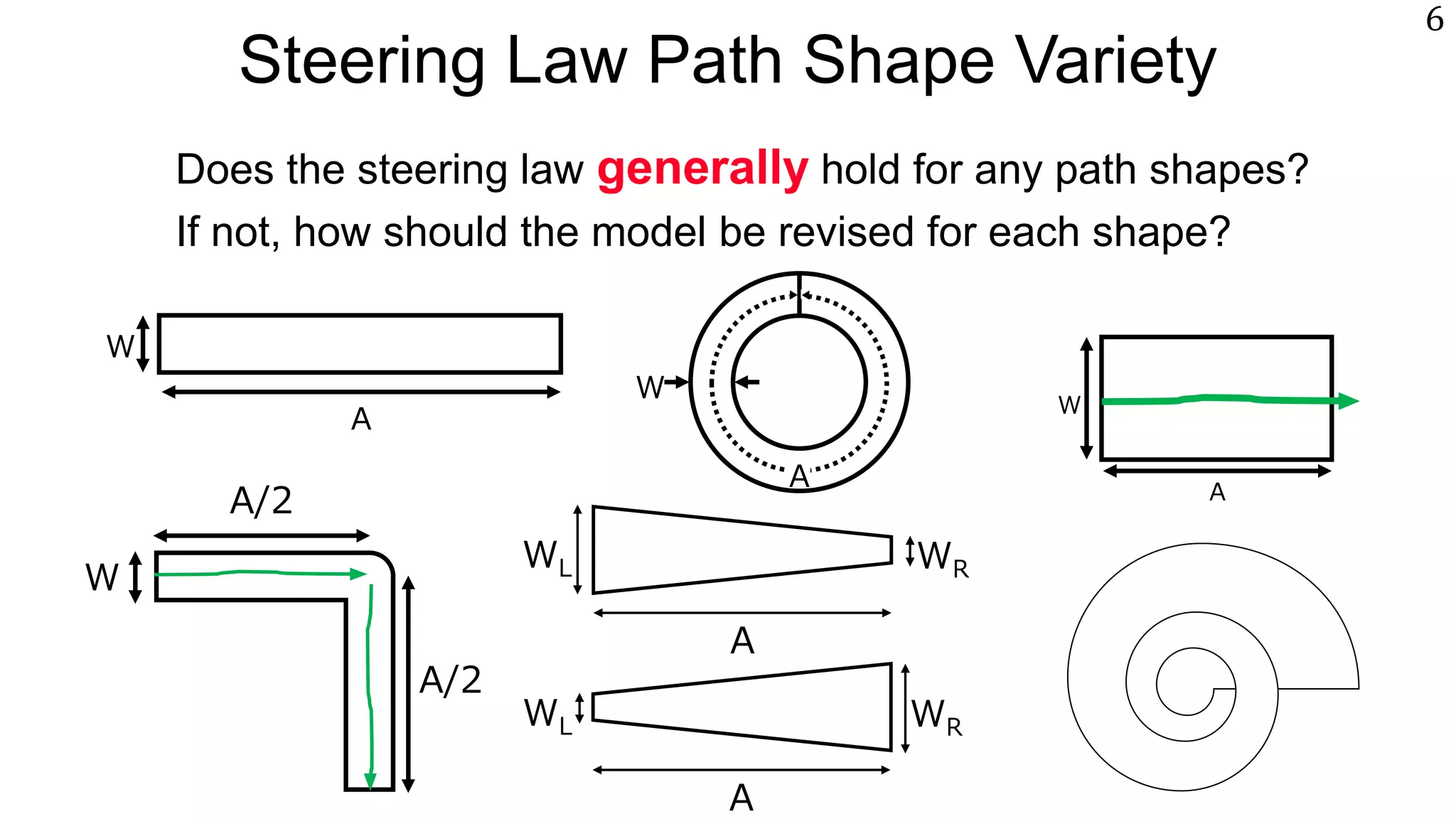
![Revised Steering Model
Corner requires pointing motion
[Pastel, CHI '06]
5
W
A/2
A/2
𝑀𝑇 = 𝑎 + 𝑏
𝐴
𝑊
+ 𝑐 log2
𝐴/2
𝑊
+ 1
Fitts’ IDSteering-ID
W
A
𝑀𝑇 = 𝑎 + 𝑏 𝐴
Open-loop behavior in very wide paths
[Thibbotuwawa+, Ergonomics '12]](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-5-2048.jpg)


![Exp. 1: Results (Model Fitness, Speed)
R2 > 0.998
9
y = 47.666x - 57.524
R² = 0.9984
0
700
1400
2100
0 10 20 30 40 50
MovementTime[ms]
ID = A/W [bits]
• Higher speed in wider path
• Gradual acceleration after pen tip
contacted surface
0
0.4
0.8
1.2
1.6
2
960 1120 1280 1440 1600
Speedonthex-axis
Cursor position on the x-axis [pixels]
0 640480320160
W = 15 pixels
W = 23 pixels
W = 33 pixels
W = 45 pixels
𝑀𝑇 = 𝑎 + 𝑏
𝐴
𝑊
Speedonthex-axis[pixels/ms]](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-9-2048.jpg)

![Exp. 2: Results (Model Fitness)
R2 > 0.985
11
𝑀𝑇 = 𝑎 + 𝑏
𝐴1
𝑊1
+
𝐴2
𝑊2
y = 55.508x - 137.28
R² = 0.9856
0
1000
2000
3000
4000
0 20 40 60 80
Movementtime[ms]
ID = A1/W1 + A2/W2 [bits]
Steering law still holds even for
a pair of joined path segments](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-11-2048.jpg)
![Exp. 2: Speed Analysis (Narrowing Path)
Path1
Deceleration in advance
of joint
Path2
Gradual acceleration.
similar to single path segment
12
0.0
0.2
0.4
0.6
0.8
1.0
1.2
800 1040 1280 1520 17600 240 480 720 960
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]
23
480 480
15
Path1
Path2](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-12-2048.jpg)
![Speed Comparison to Exp. 1
In presence of joint, speed
decreased in 1st segment
・911 ms for a single path
・1323 ms for joined paths (45% up)
No notable change in 2nd segment
・1451 ms for a single path
・1444 ms for joined paths
(0.77% down)
Only behavior in 1st segment
affected by joint
13
0.0
0.2
0.4
0.6
0.8
1.0
1.2
800 1040 1280 1520 17600 240 480 720 960
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]
23
480 480
15
Exp. 1
Exp. 2
Exp. 1](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-13-2048.jpg)
![0
0.2
0.4
0.6
0.8
1
1.2
800 1040 1280 1520 1760
Speed[pixels/ms]
Cursor position on the x-axis [pixels]
Exp. 2: Speed Analysis (Widening Path)
14
0 240 480 720 960
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]
23
480 480
15
Speed decreased in 1st segment
1451 ms for single path
1688 ms for joined paths (16% up)
No notable change in 2nd segment
911 ms for single path
890 ms for joined paths (2.3% down)
Only behavior in 1st segment
was affected by joint
Single path: W=15
Single path: W=23
Joined paths: W1=15 & W2=23
Path1
Path2](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-14-2048.jpg)
![Exp. 3: Results (Model Fitness)
High fitness: R2 > 0.962
Even for two joined path segments with
same path type, steering law holds
16
𝑀𝑇 = 𝑎 + 𝑏
𝐴1
𝑊1
+
𝐴2
𝑊2
y = 45.84x - 99.836
R² = 0.9626
0
1000
2000
3000
4000
0 30 60 90
MT[ms]
ID = A1/W1 + A2/W2 [bits]
・Ratio of lengths (A1 : A2)
・Narrowing/widening/constant-width shapes](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-16-2048.jpg)
![0
0.4
0.8
1.2
1.6
490 790 1090 1390
0
0.4
0.8
1.2
1.6
490 790 1090 1390
0
0.4
0.8
1.2
1.6
490 790 1090 1390
Exp. 3: Speed Analysis (Single Path)
Speed profiles similar to Exp. 1
• Speed higher in wider path
• Speed gradually increased after pen tip contacted surface
17
W = 15 pixels W = 23 pixels W = 39 pixels
0 300 600 900 1200
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]
0 300 600 900 1200
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]
0 300 600 900 1200
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-17-2048.jpg)
![Exp. 3: Speed Analysis (Joined Paths)
18
0
0.5
1
1.5
AxisTitle
Axis Title
0
0.5
1
1.5
AxisTitle
Axis Title
0 200 400 600 800 1000 12000 200 400 600 800 1000 1200
Cursor position on the x-axis [pixels]
Speedonthex-axis[pixels/ms]
Cursor position on the x-axis [pixels]
0
1.0
1.5
0.5
0
1.0
1.5
0.5
Speedonthex-axis[pixels/ms]
Speed profiles similar to Exp. 2
• 1st segment: slower speed than single path
• 2nd segment: no remarkable difference from single path
Narrowing path
(W1 = 23 > W2 = 15)
Widening path
(W1 = 15 < W2 = 23)](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-18-2048.jpg)
![Improve prediction accuracy of steering law model through taking
slow-down behavior until joint into account
19
Narrowing path Widening path Constant-width path
0
0.5
1
1.5
480 880 1280 1680
Speedonthex-axis[pixels/ms]
0 400 800 1200
Cursor position on the x-axis [pixels]
0
0.5
1
1.5
480 880 1280 1680
Speedonthex-axis[pixels/ms]
0 400 800 1200
Cursor position on the x-axis [pixels]
0
0.5
1
1.5
490 890 1290
Speedonthex-axis[pixels/ms]
0 400 800 1200
Cursor position on the x-axis [pixels]
Revisions based on Deceleration in 1st Segment
Joints clearly affected users’ behaviors](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-19-2048.jpg)
![Approach for Revised Model
Model entering 2nd segment as a crossing task
20
Crossing law [Accot+, CHI '02]: Time to cross a finite-length line:
𝑀𝑇 = 𝑎 + 𝑏 log2
𝐴
𝑊
+ 1
A
W](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-20-2048.jpg)
![Our Revised Model
21
W1 W
2
A1 A2
5W1A1-5W1 A2
𝑀𝑇 = 𝑎 + 𝑏
𝐴1 − 5𝑊1
𝑊1
+ 𝑐 𝐥𝐨𝐠 𝟐
𝟓𝑾 𝟏
𝑾 𝟐
+ 𝟏 + 𝑑
𝐴2
𝑊2
Steering-ID
of 1st segment
Crossing–ID
of joint
Steering-ID
of 2nd segment
From related work [Senanayake+]](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-21-2048.jpg)


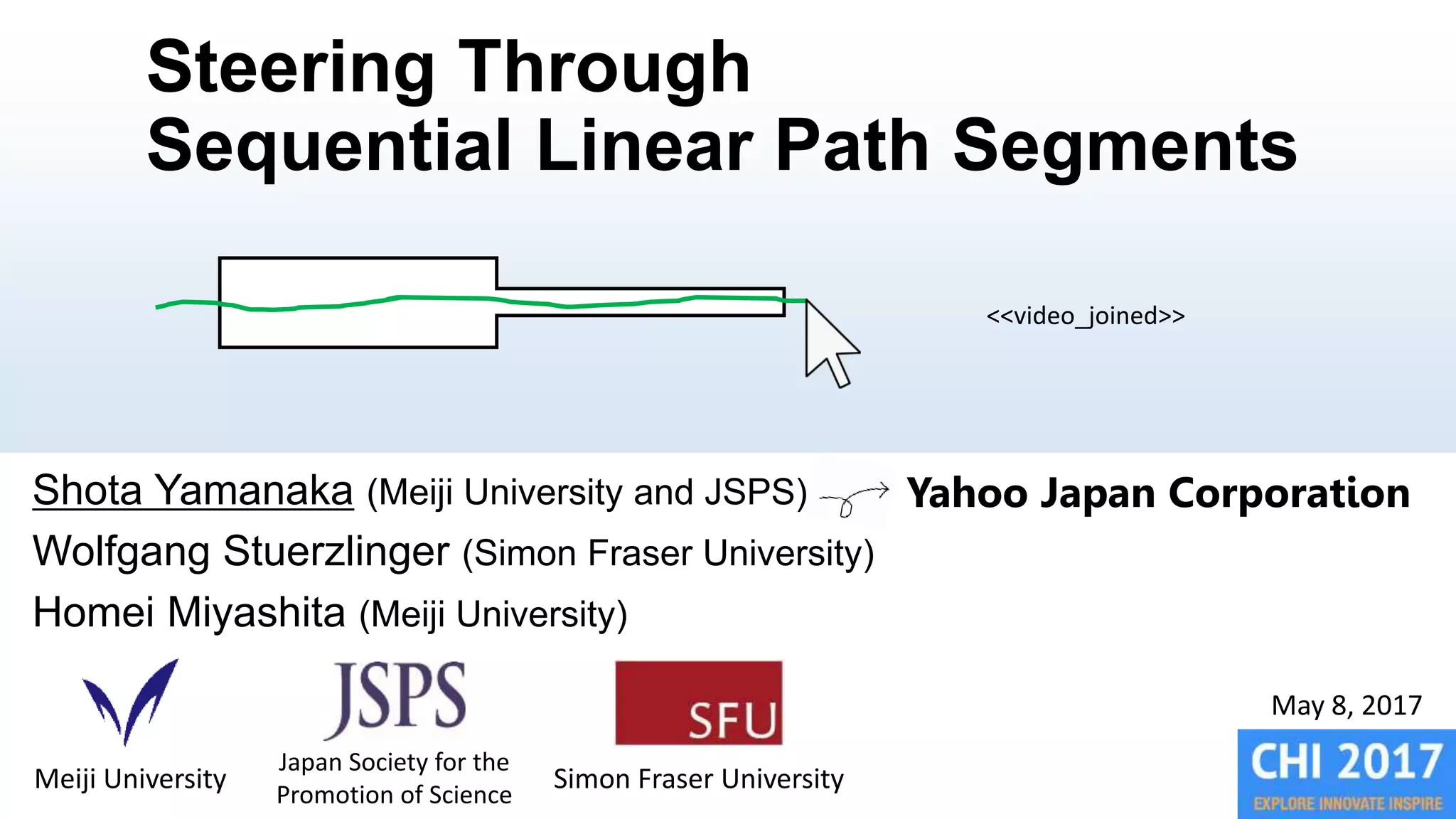
![Steering Through Sequential Linear Path Segments
24
• MT accurately predicted by general steering law (= sum of two IDs),
even if path lengths are different (A1 ≠ A2), and widths are same (W1 = W2)
• Speed profiles affected by shape (narrowing/widening/constant)
• In joined path segments, deceleration was observed clearly in 1st segment
• Model fitness improved by inserting crossing-ID at end of 1st segment
Narrowing path Widening path
0
0.5
1
1.5
480 880 1280 1680
Speedonthex-axis[pixels/ms]
0 400 800 1200
Cursor position on the x-axis [pixels]
0
0.5
1
1.5
480 880 1280 1680
Speedonthex-axis[pixels/ms]
0 400 800 1200
Cursor position on the x-axis [pixels]
<<video_joined>>
Contact: syamanak@yahoo-corp.jp](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-24-2048.jpg)

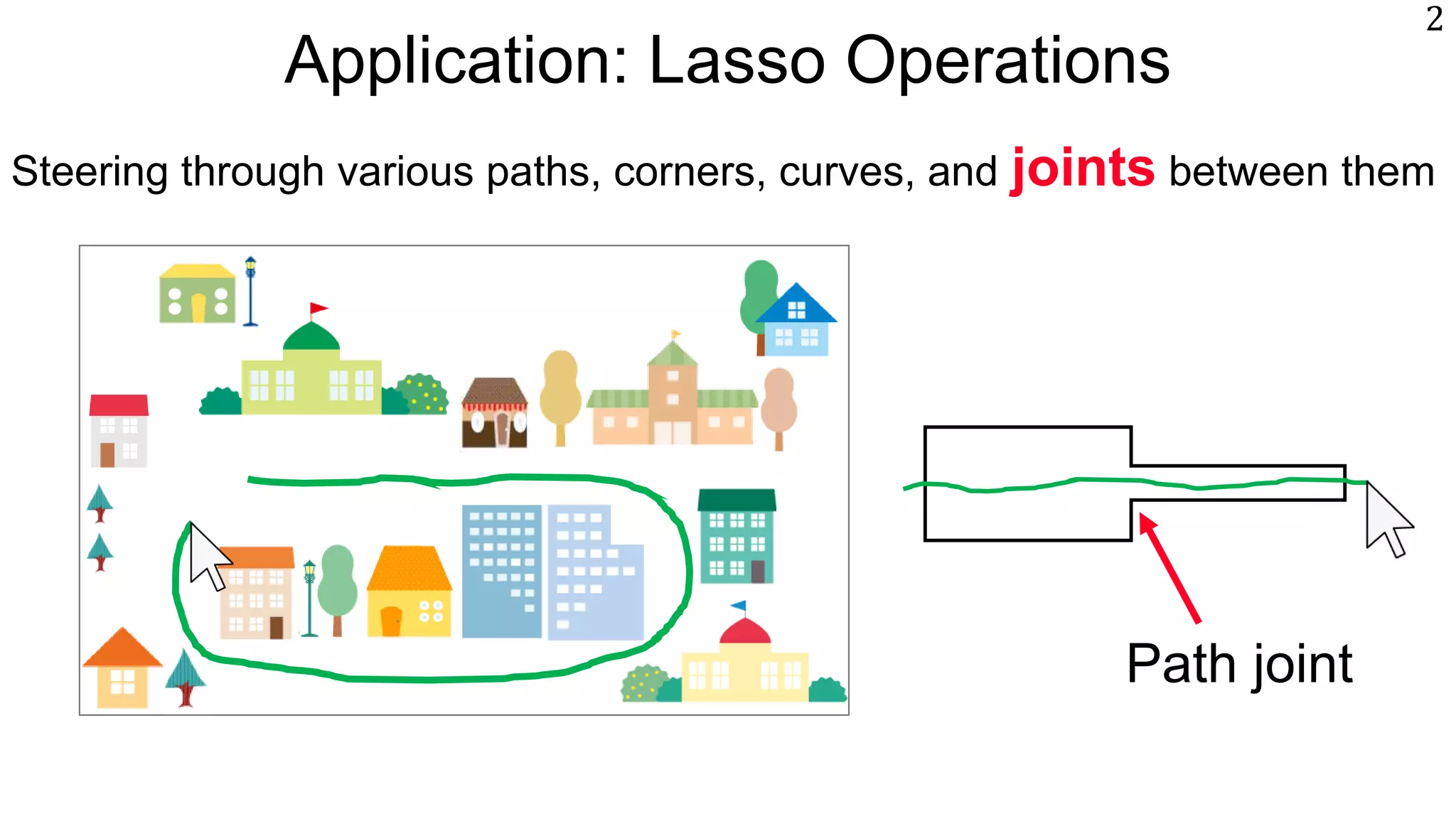
![Appendix: Steering Tasks with a Pointing Motion
[Senanayake+, Experimental Brain Research '13]
To click a target at end of a steered path, observed motion changes
at 5W distance from target
(After that point, users seem not to worry about deviating from path)
26
Steering motion Pointing motion
5×W
W
Target](https://image.slidesharecdn.com/chi2017yamanakanovideo-170508183954/75/Chi2017-yamanaka-novideo-26-2048.jpg)




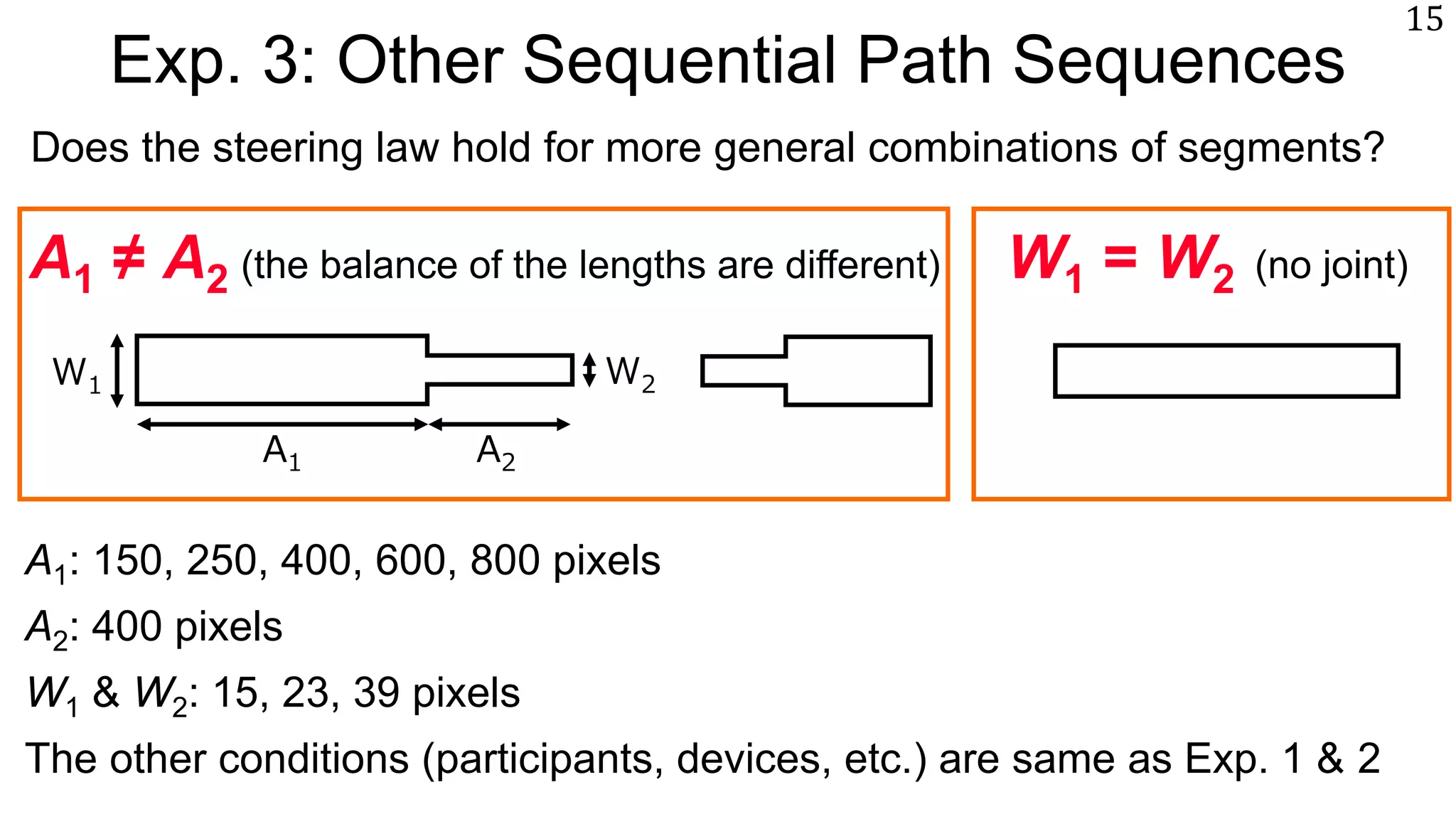
The document summarizes three experiments investigating whether a general steering law model can accurately predict movement time for sequential linear path segments. The experiments found that: 1) Movement time was accurately predicted by the sum of the index of difficulties of the two path segments, even when path lengths and widths differed. 2) Speed profiles were affected by path shape (narrowing, widening, constant width), with slower speeds in the first segment of joined paths. 3) A revised model that included a crossing index of difficulty term for the path joint improved prediction accuracy by accounting for deceleration in the first segment.