This document discusses numerical methods for finding roots or solutions of equations. Some key methods mentioned include:
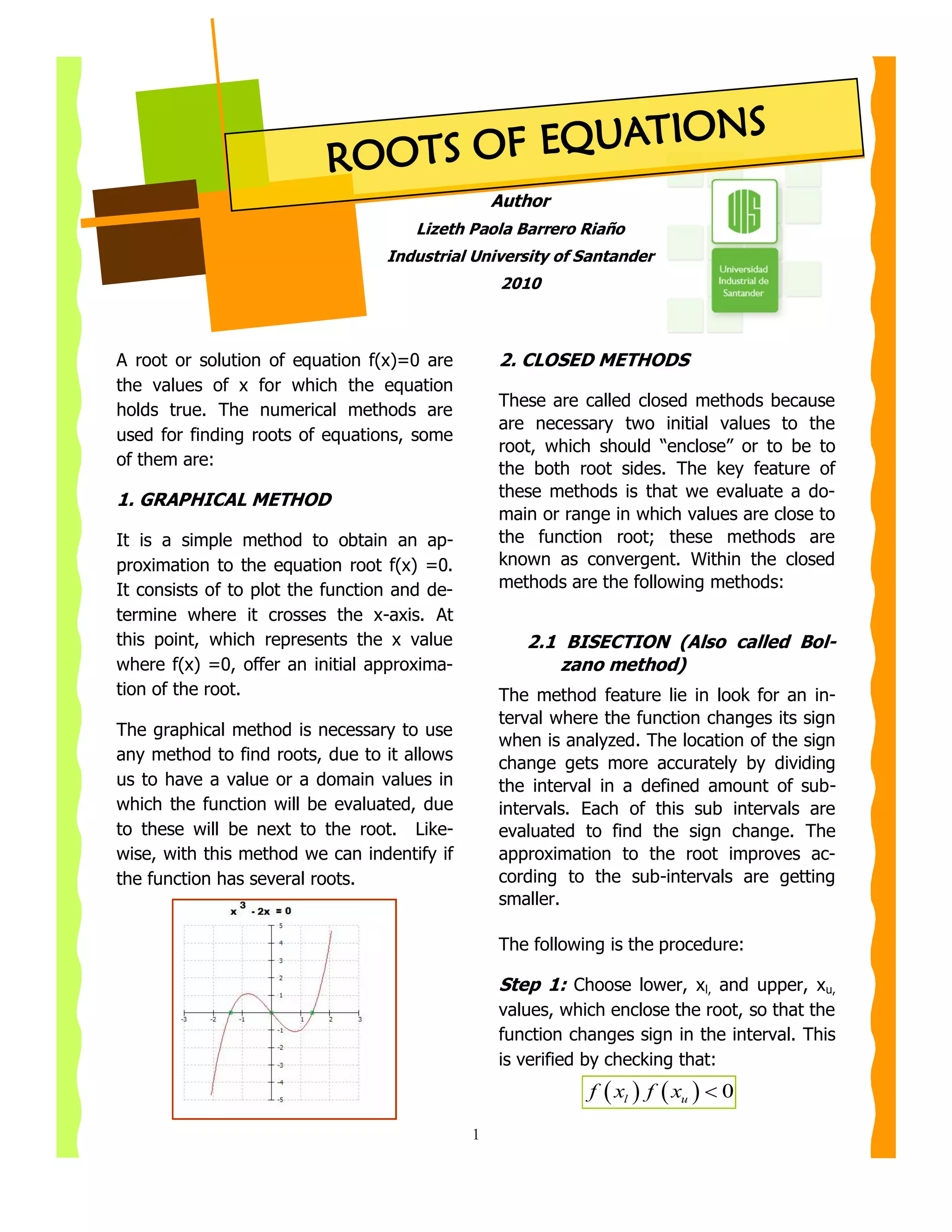
- Graphical method to obtain initial approximations of roots by plotting the function
- Bisection method which divides intervals in half to find where the function changes sign
- False position method which uses a straight line between two points to get a better approximation than bisection
- Iteration methods like Newton-Raphson which use formulas to iteratively predict new values converging on the root
- Multiple roots can be found by modifying Newton-Raphson or using methods like Bairstow's which divides polynomials





![c. If the roots are complex, there is a Thus, this parable is used to intersect the
conjugate pair (i.e., λ + µi y λ - µi) where three points [x0, f(x0)], [x1, f(x1)] and [x2, f
(x2)]. The coefficients of the previous equa-
tion are evaluated by substituting one of
these three points to make:
A predecessor of Muller method is the se-
cant method, which obtain root, estimating f ( x0 ) a( x0 x2 )2 b( x0 x2 ) c
a projection of a straight line on the x-axis
through two function values (Shape f ( x1 ) a( x1 x2 ) 2 b( x1 x2 ) c
1). Muller's method takes a similar view, but
f ( x2 ) a( x2 x2 ) 2 b( x2 x2 ) c
projected a parabola through three points
(Shape 2).
f ( x2 ) c
The last equation generated that ,
The method consist in to obtain the coeffi- in this way, we can have a system of two
cients of the three points, replace them in equations with two unknowns:
the quadratic formula and get the point
where the parabola intersects the x-axis The f ( x0 ) f ( x2 ) a( x0 x2 )2 b( x0 x2 )
approach is easy to write, as appropriate
this would be: f ( x1 ) f ( x2 ) a( x1 x2 ) 2 b( x1 x2 )
f 2 ( x) a( x x2 ) 2 b( x x2 ) c Defining this way:
h0 x1 x0 h1 x2 x1
f ( x 2 ) f ( x1 ) f ( x1 ) f ( x 2 )
1 0
x 2 x1 x1 x0
Substituting in the system:
(h0 h1 )b (h0 h1 ) 2 a h0 0 h1 1
h1b h1 a h1 1
2
The coefficients are:
Shape 1 1 0
a b ah1 1
h1 h0
c f ( x2 )
Finding the root, the conventional solution is
implemented, but due to rounding error po-
tential, we use an alternative formulation:
2c
x3 x 2
b b 2 4ac
Shape 2
6](https://image.slidesharecdn.com/chapter3-rootsofequations-100517212743-phpapp01/85/Chapter-3-roots-of-equations-6-320.jpg)