Downloaded 13 times
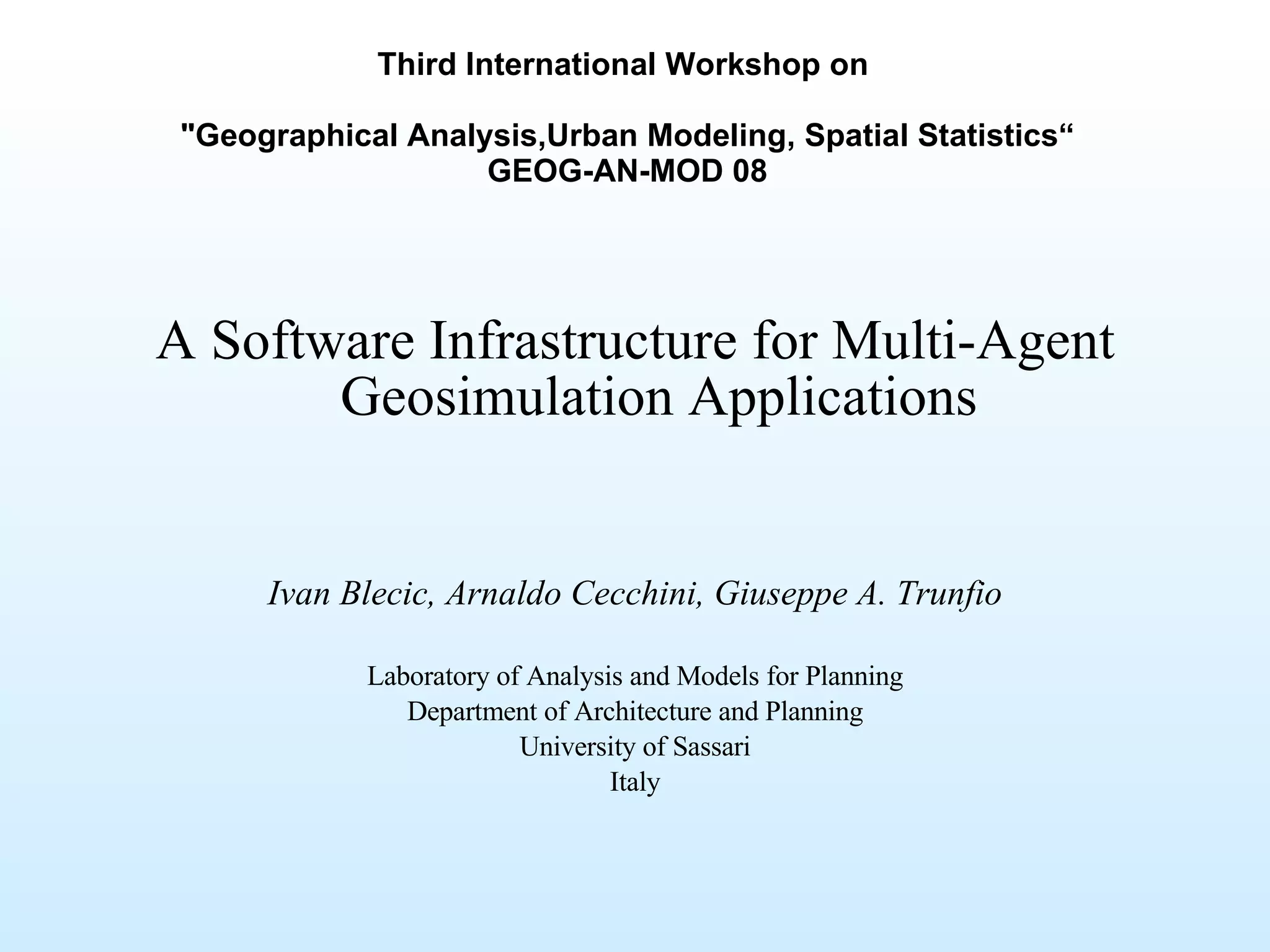
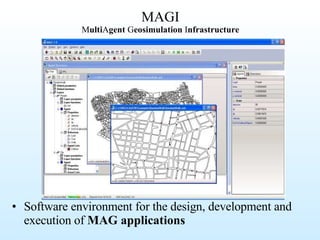
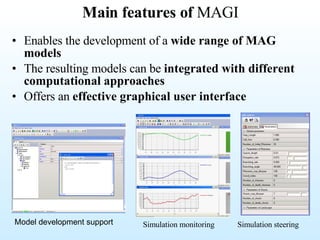
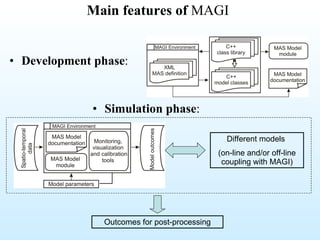


MAGI is a software infrastructure for developing and executing multi-agent geosimulation (MAG) models. It provides libraries, tools and a graphical user interface to design, build, run and analyze MAG simulations. MAGI models represent real-world geographic phenomena using agents that interact spatially within a GIS environment. It supports various agent and spatial representations, scheduling approaches, and interoperability with GIS software.


































































