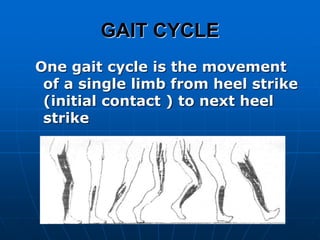
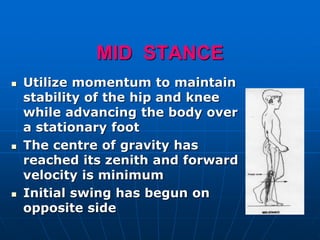
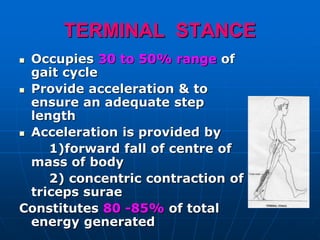
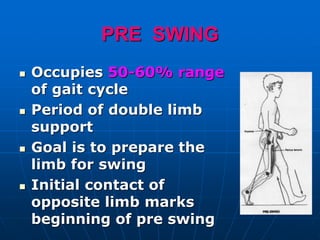
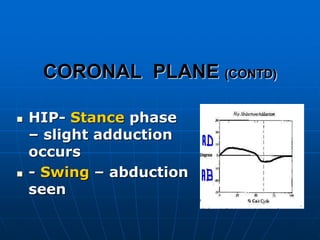
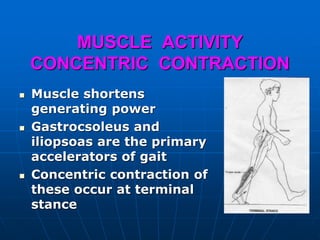
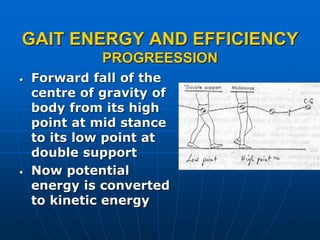
Human gait involves a highly coordinated cyclic motion of the limbs to propel the body forward. The gait cycle consists of a stance phase where the foot is on the ground and a swing phase where it is off the ground. During stance, the body's center of mass falls forward to provide momentum for walking. Key muscle groups like the gastrocnemius help provide this forward propulsion. The central nervous system precisely controls muscles to maintain stability and balance during walking. Abnormalities can disrupt this coordination and cause deviations from normal gait patterns.

































![GAIT and its different types[Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/gaitautosaved-240815185755-7939fafe-thumbnail.jpg?width=640&height=640&fit=bounds)














































