Download as PDF, PPTX

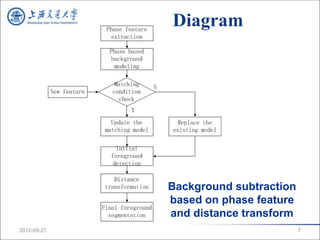
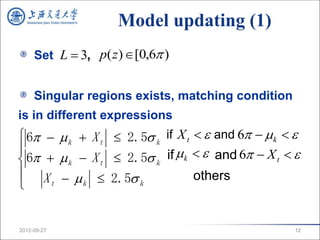
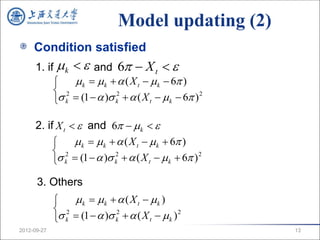
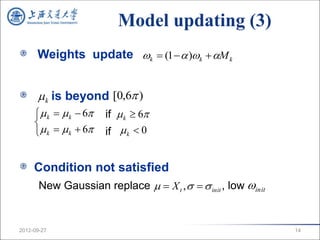
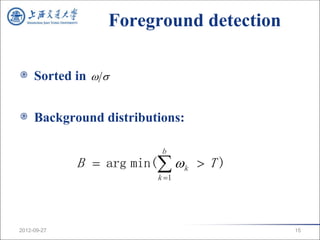
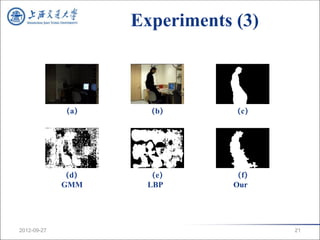
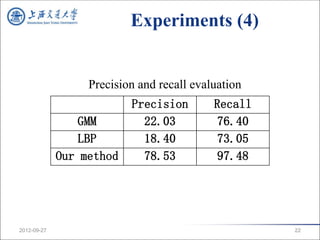
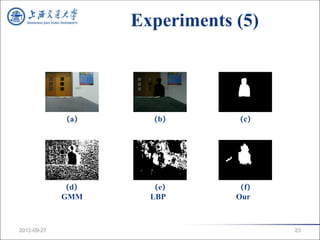
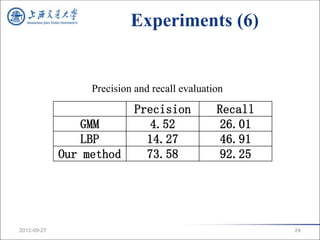

This document summarizes a research paper on background subtraction under sudden illumination changes. It proposes using phase features and distance transforms. Key points: 1. It extracts phase features from Gabor wavelet coefficients that are insensitive to illumination changes. 2. It models pixel backgrounds using Gaussian mixtures on the phase space and updates the models under a novel matching condition. 3. Experiments show the method achieves better precision and recall than GMM and LBP methods on test sequences under illumination changes.
























![[unofficial] Pyramid Scene Parsing Network (CVPR 2017)](https://cdn.slidesharecdn.com/ss_thumbnails/pyramidsceneparsingnetwork-170815035025-thumbnail.jpg?width=640&height=640&fit=bounds)