Download as PPSX, PPTX



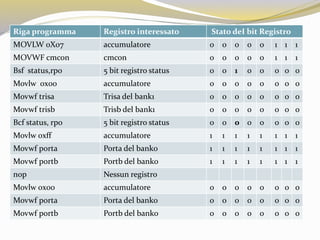







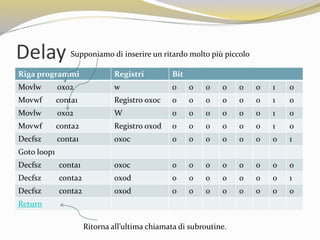
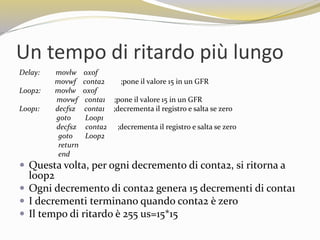


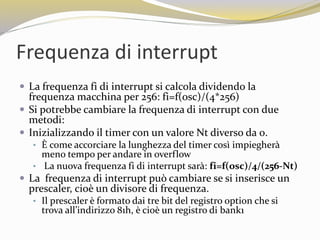
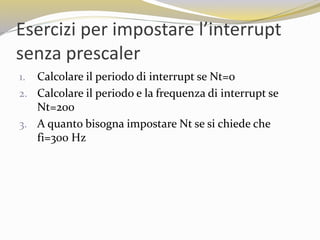
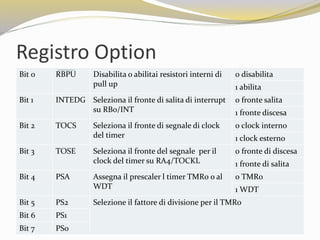

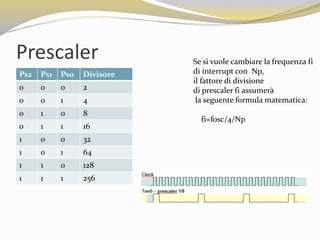




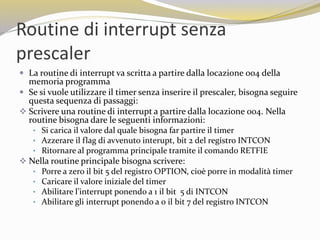
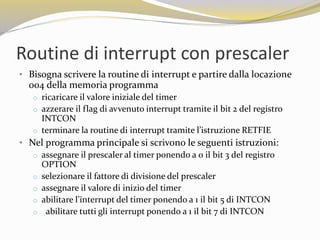








Il documento tratta della gestione dei ritardi in microcontrollori utilizzando un generatore di onde quadre e istruzioni di ritardo come 'nop'. Viene fornito un esempio di programma in assembly per il PIC16F628 che utilizza registri e subroutine per creare ritardi e gestire l'accensione e lo spegnimento di LED. Si discute anche la configurazione del timer e delle interruzioni, incluso l'uso di un prescaler per modificare la frequenza dell'interrupt.

















































