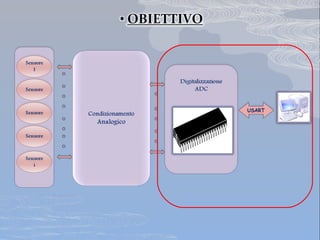
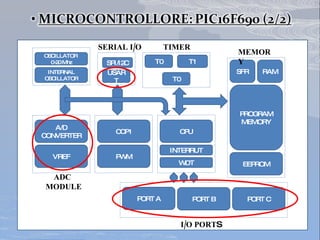
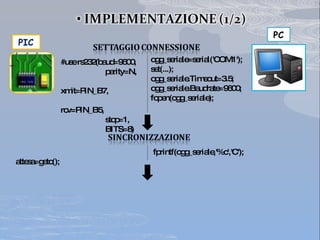
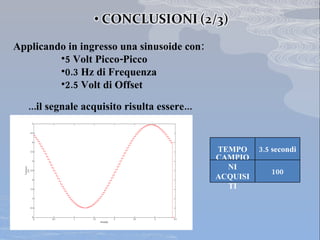
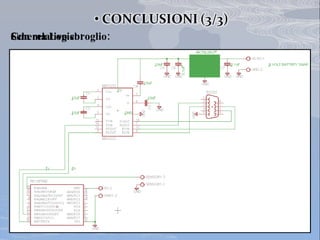
Il documento descrive la progettazione e realizzazione di un sistema embedded per la gestione di sistemi multi-sensorizzati, utilizzando il microcontrollore PIC16F690. Si evidenziano le specifiche tecniche come tensione di alimentazione, interfacciamenti e modalità di programmazione, oltre alla realizzazione di un prototipo per l'acquisizione di segnali. Vengono infine forniti dettagli sulla struttura dell'hardware e sul processo di trasferimento dati.