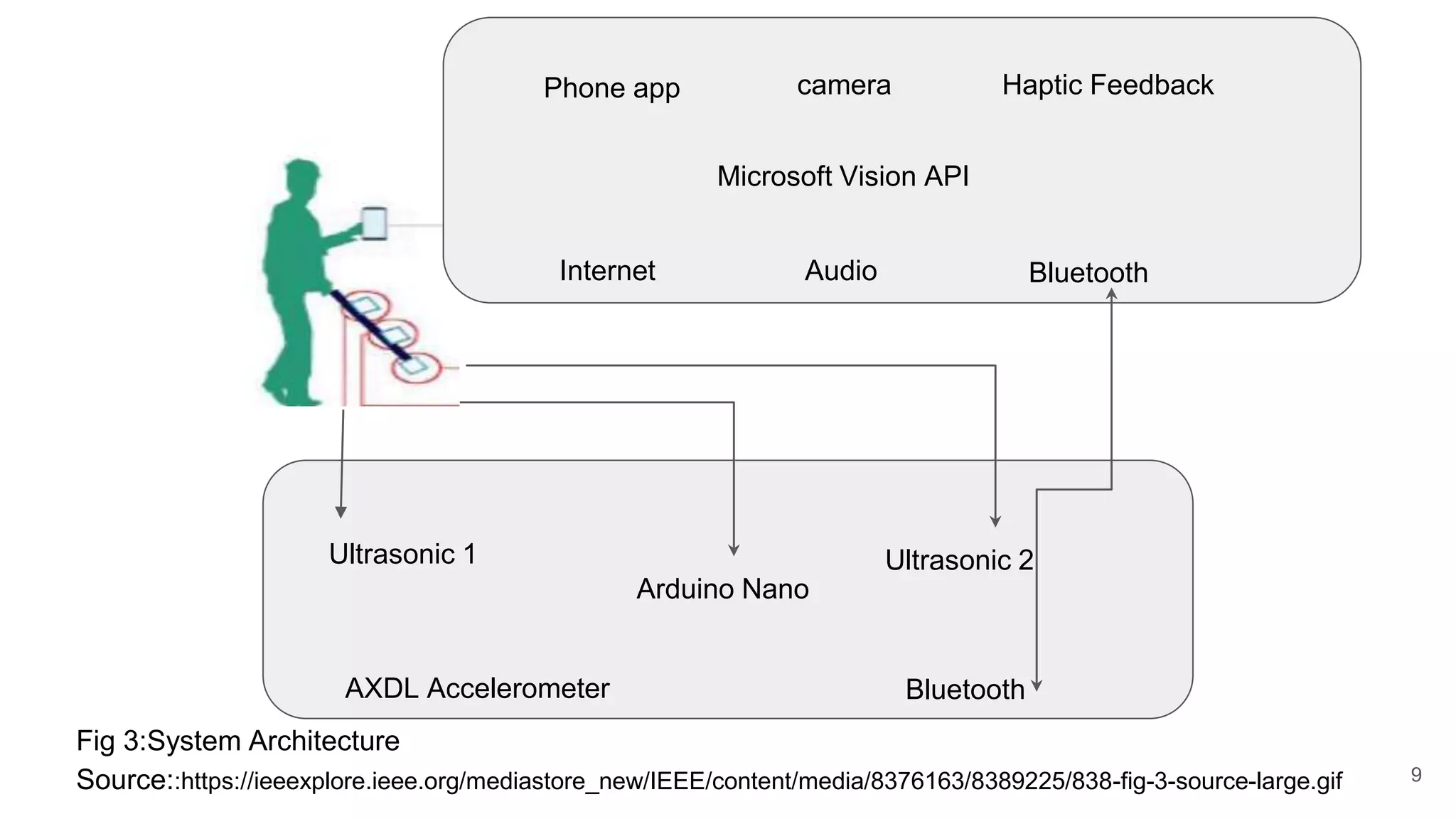
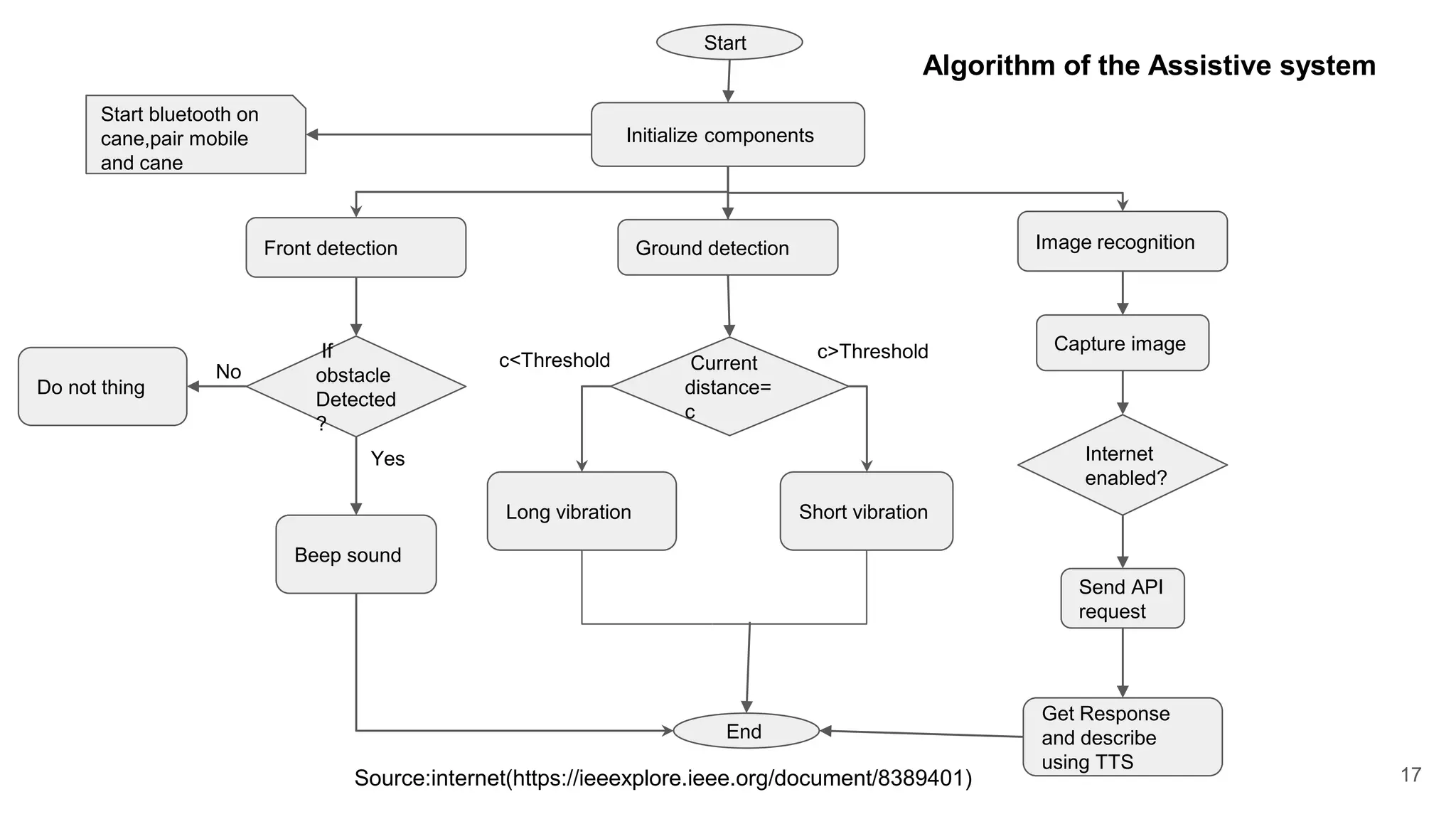
The document presents a low-cost assistive system for visually impaired individuals that integrates artificial intelligence and various sensors to facilitate independent navigation. The system performs image recognition, collision detection, and obstacle detection using a combination of a smartphone application and hardware components like ultrasonic sensors and a microcontroller. It addresses affordability and effectiveness issues prevalent in existing assistive technologies, particularly for low-income users.
![References:
[1]Sandesh Chinchole,Samir Patel,”Artificial Intelligence and Sensors Based Assistive System for the Visually Impaired
People”Proceedings of the International Conference on Intelligent Sustainable Systems (ICISS 2017).IEEE Xplore
Compliant - Part Number:CFP17M19-ART, ISBN:978-1-5386-1959-9,December 2018.
[2] A. Iqbal, U. Farooq, H. Mahmood, and M.U. Asad, “A low cost artificial vision system for visually impaired people,” 2009
Second International Conference on Computer and Electrical Engineering,pp. 474-479, December 2009.
[3]Blindness: vision 2020 - The global initiative for the elimination of avoidable blindness. Retrieved from
http://www.who.int/mediacentre/factsheets/fs213/en/
[4]L.A. Johnson and C.M. Higgins, “A navigation aid for the blind using tactile-visual sensory substitution,” 2006 International
Conference of the IEEE Engineering in Medicine and Biology Society, pp. 6298–6292, August 2006.
19](https://image.slidesharecdn.com/artificialintelligenceandsensorbasedassistivesytemforvisuallyimpairedperson-190314135701/75/Artificial-intelligence-and-sensor-based-assistive-sytem-for-visually-impaired-person-19-2048.jpg)