The document discusses advanced concepts in computational design, focusing on manifolds, graphs, and fields, particularly their roles in configurative design and spatial structures. It examines terminologies and mathematical relationships such as Poincaré duality, various geometric dimensions, and their relevance in network structures and social dynamics. Key applications include spatial navigation, network analysis, and the impact of spatial arrangements on social interactions.


![77
terminology
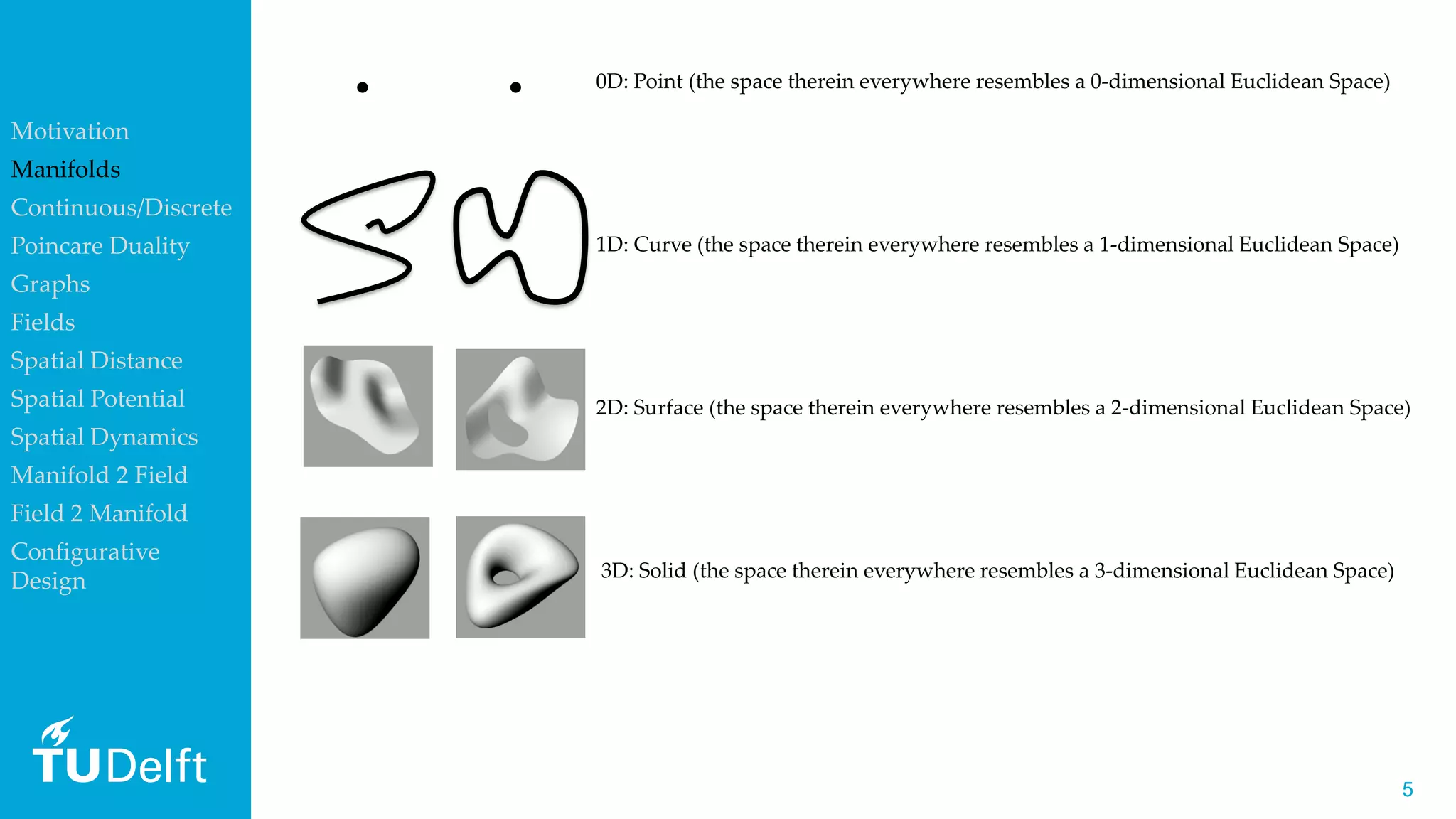
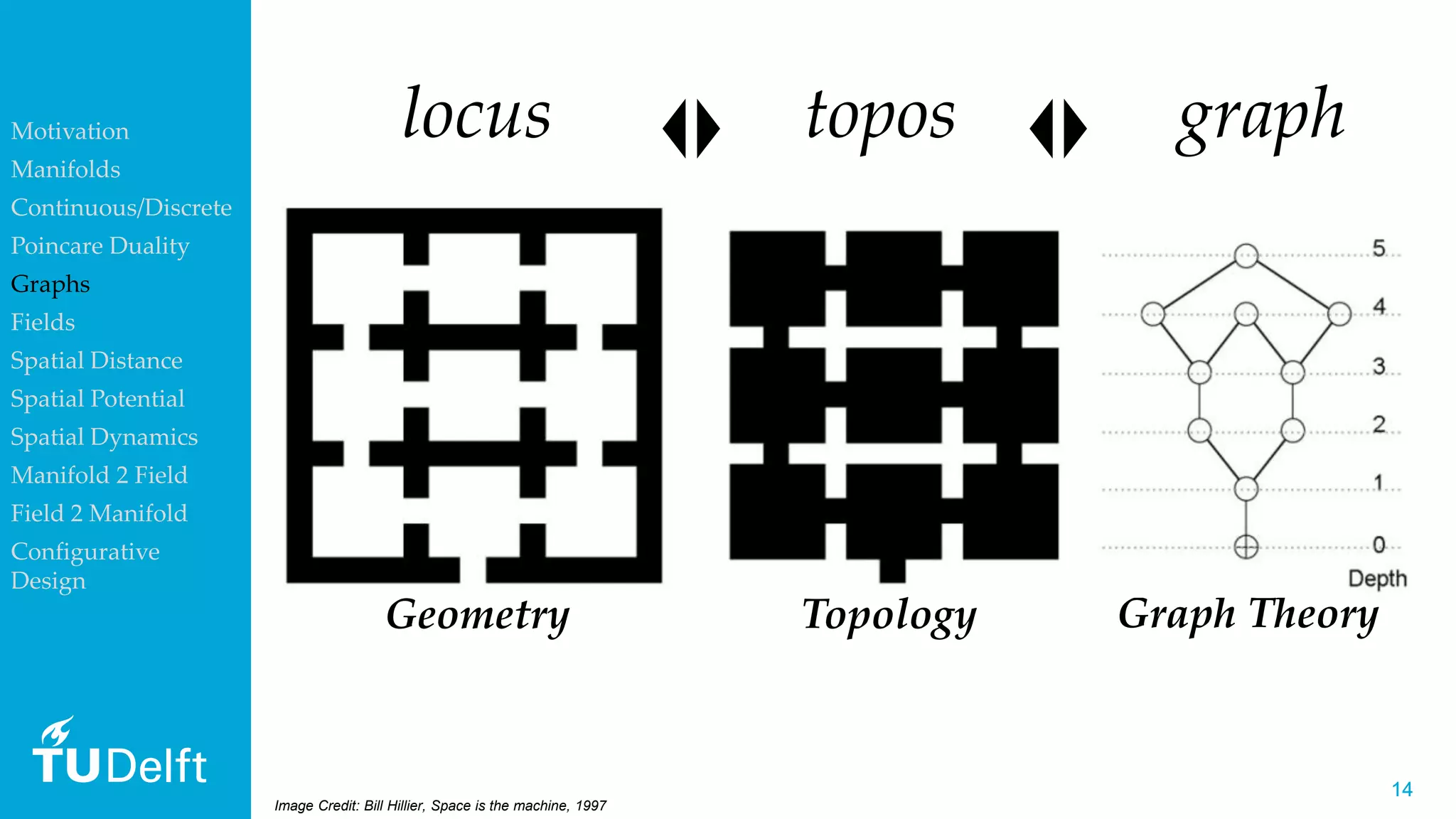
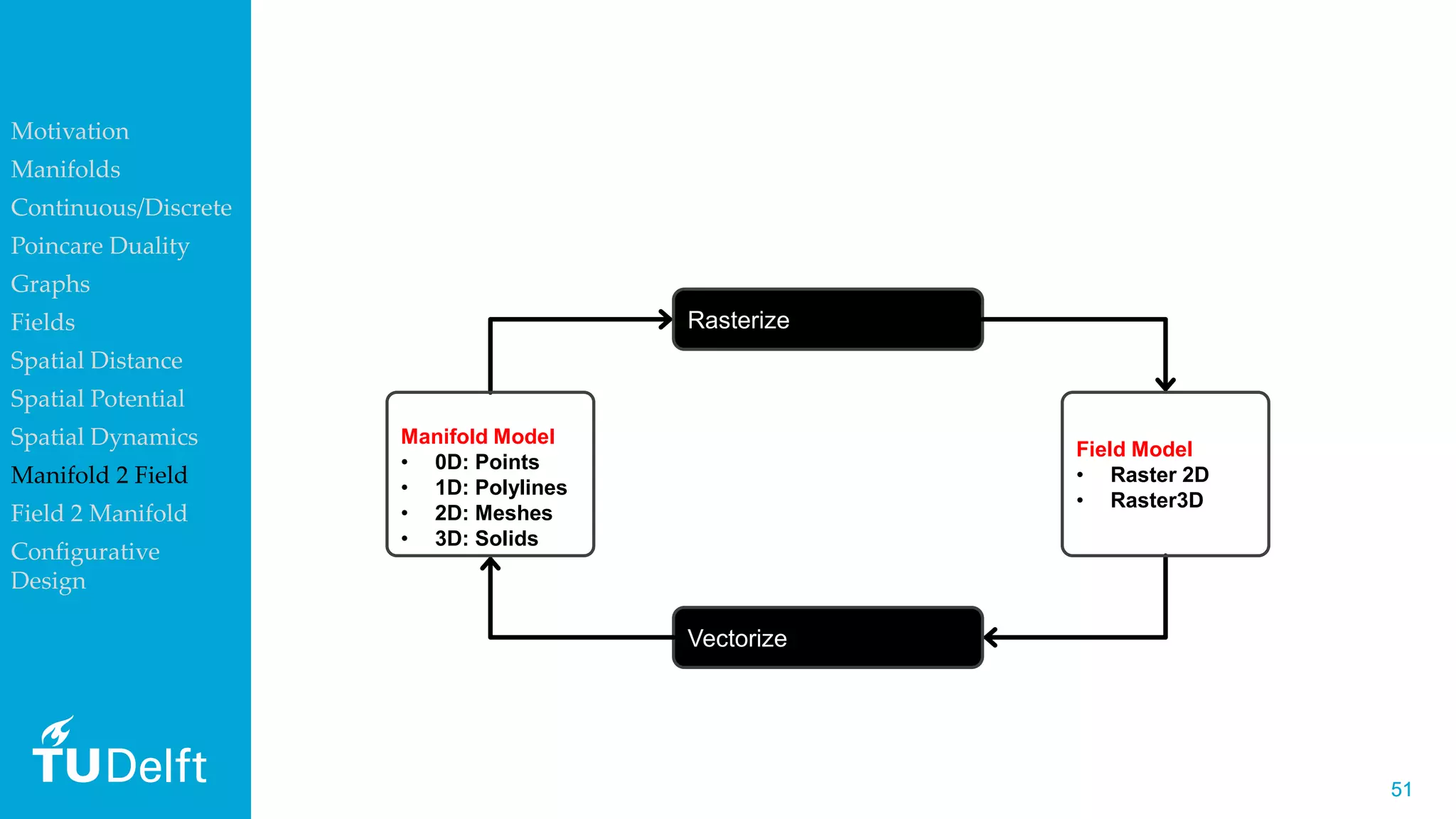
• Geometry: Point (0D), Curve(1D), Surface(2D), Solid (3D) [free-form]
• Geometry: Point (0D), Line(1D), Polygon(2D), Polyhedron (3D) [piecewise linear]
• Topology: Vertex(0D), Edge(1D), Face(2D), Body(3D)
• Graph Theory: Object, Link, (and n-Cliques)
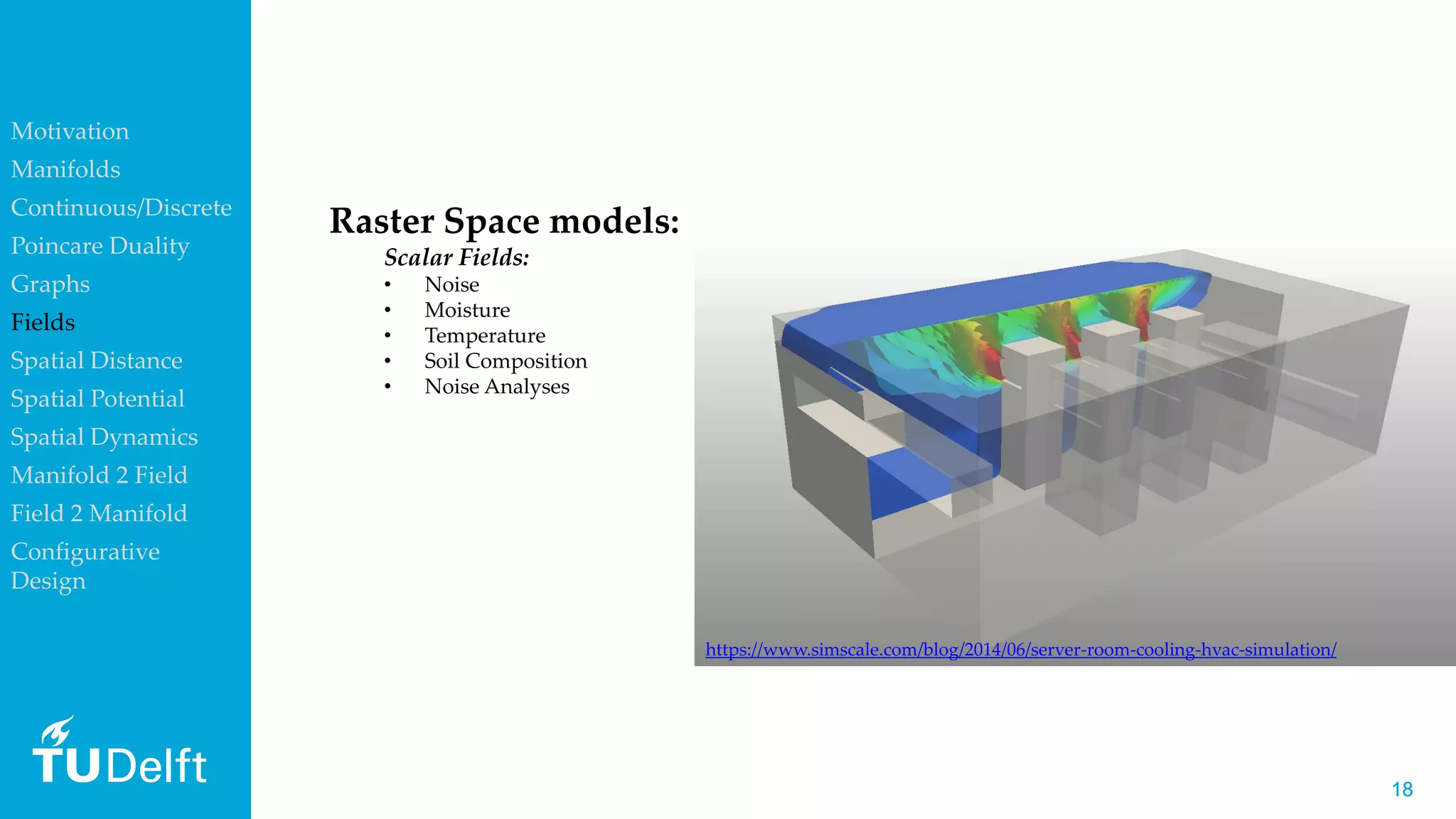
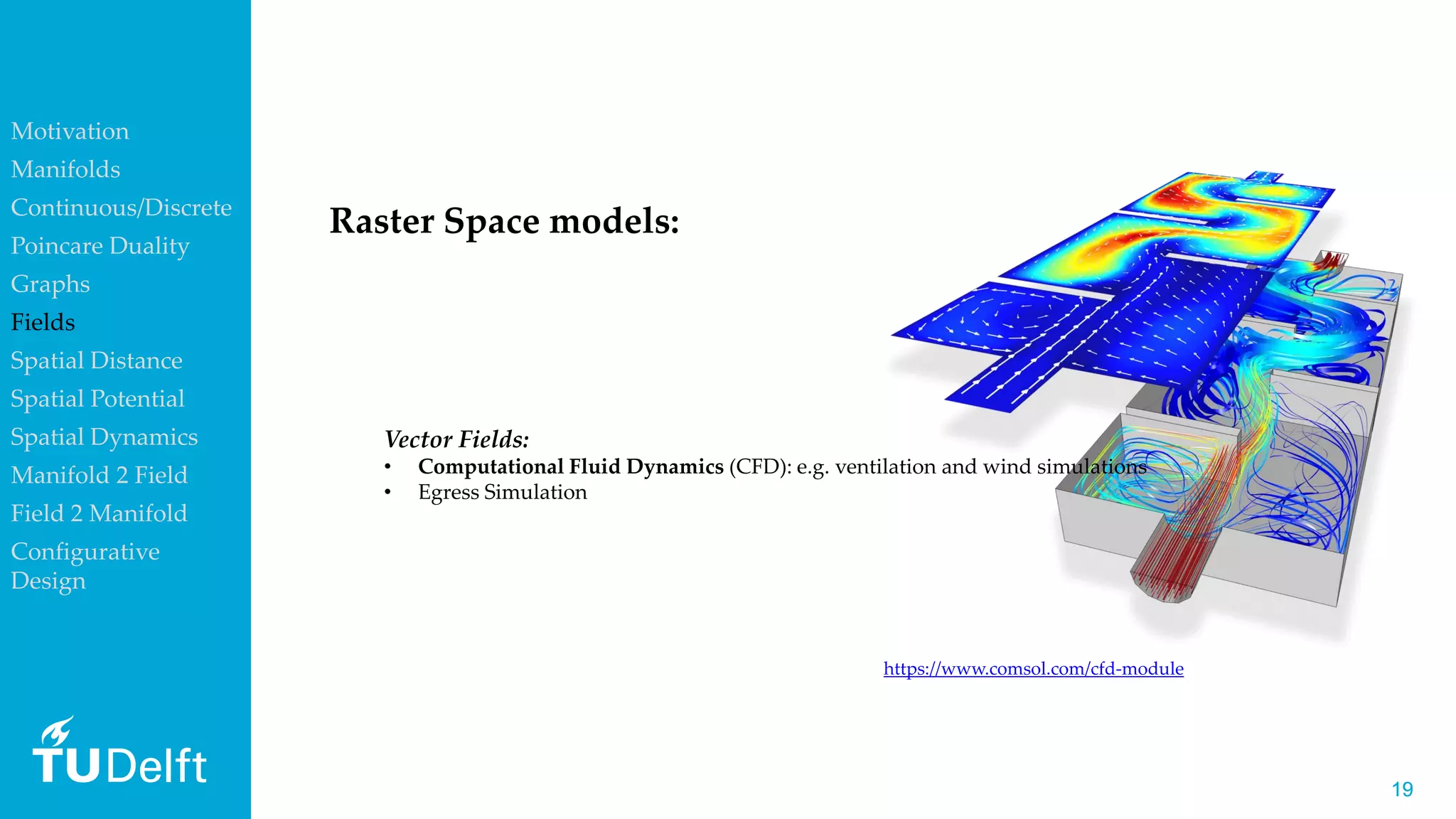
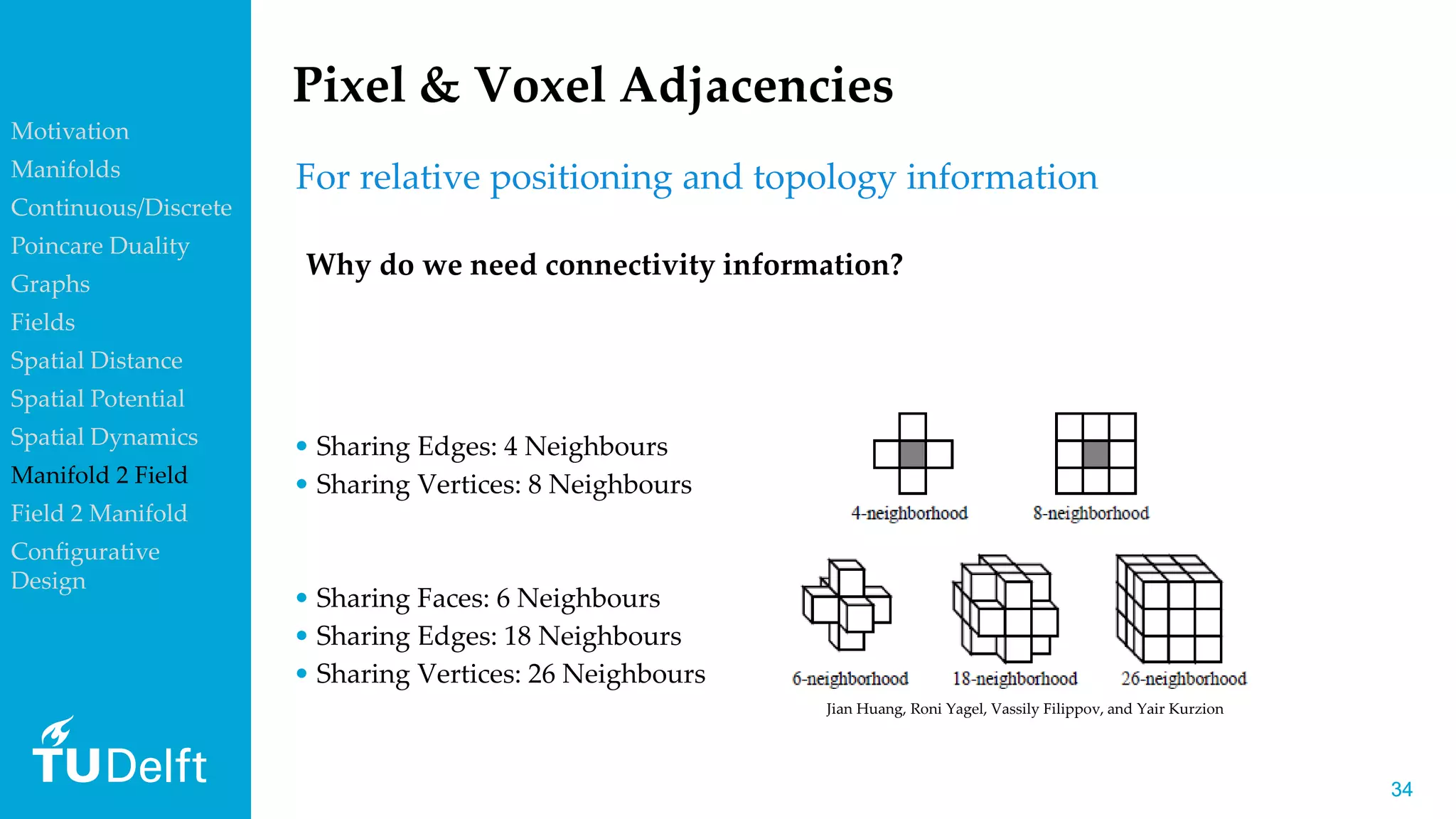
• Fields: Pixel, Voxel, Raster2D, Raster 3D
Motivation
Manifolds
Continuous/Discrete
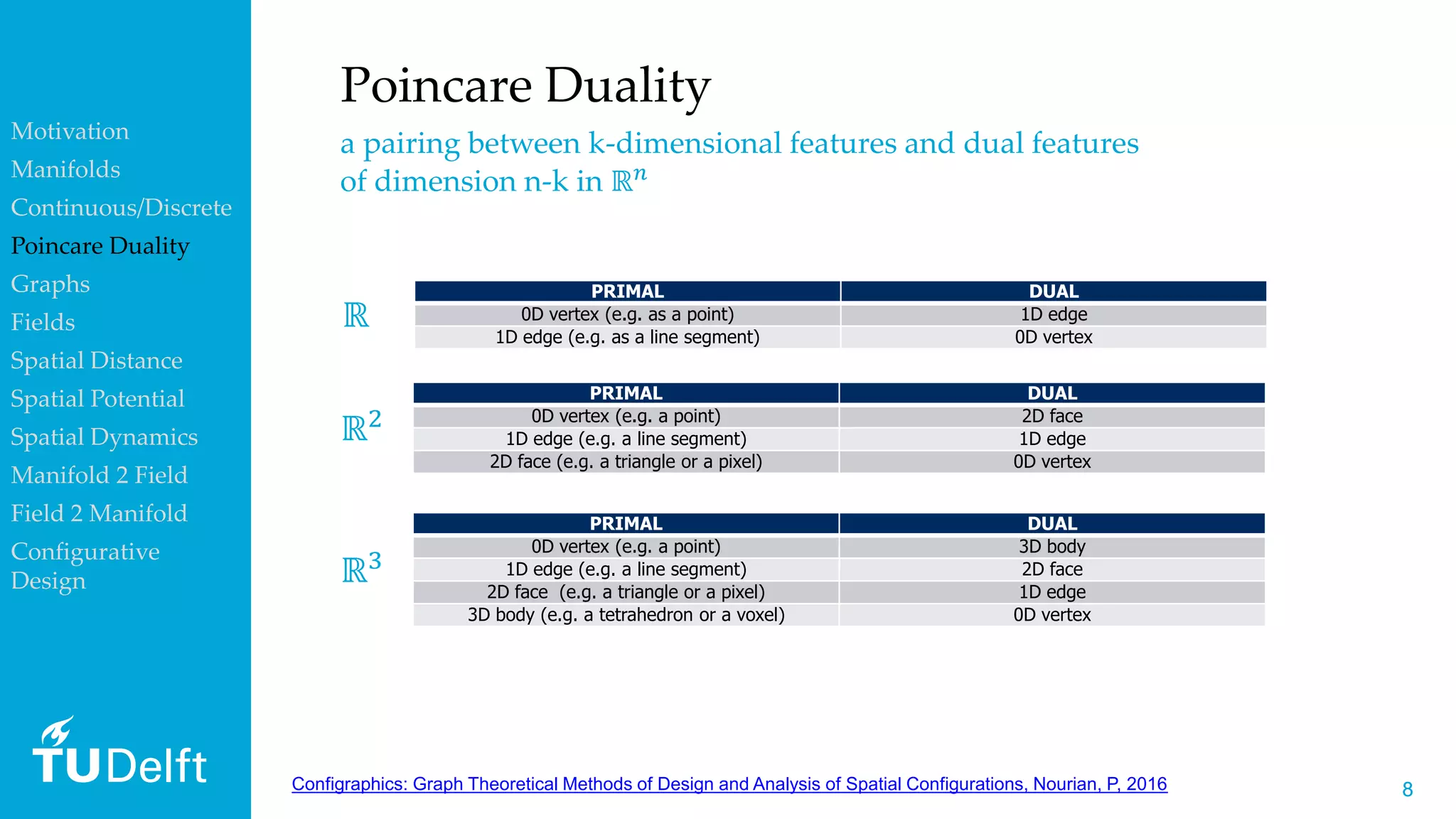
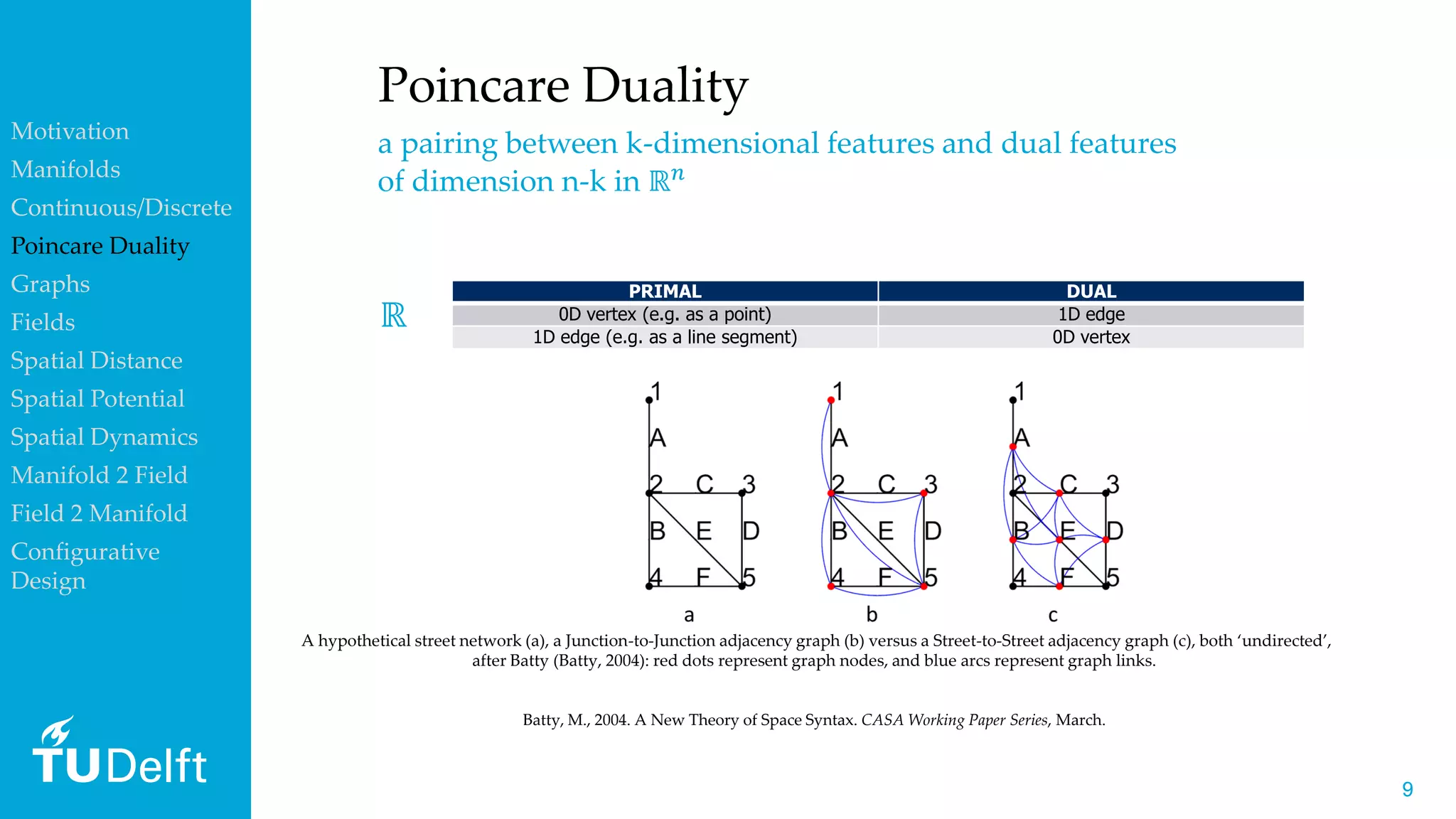
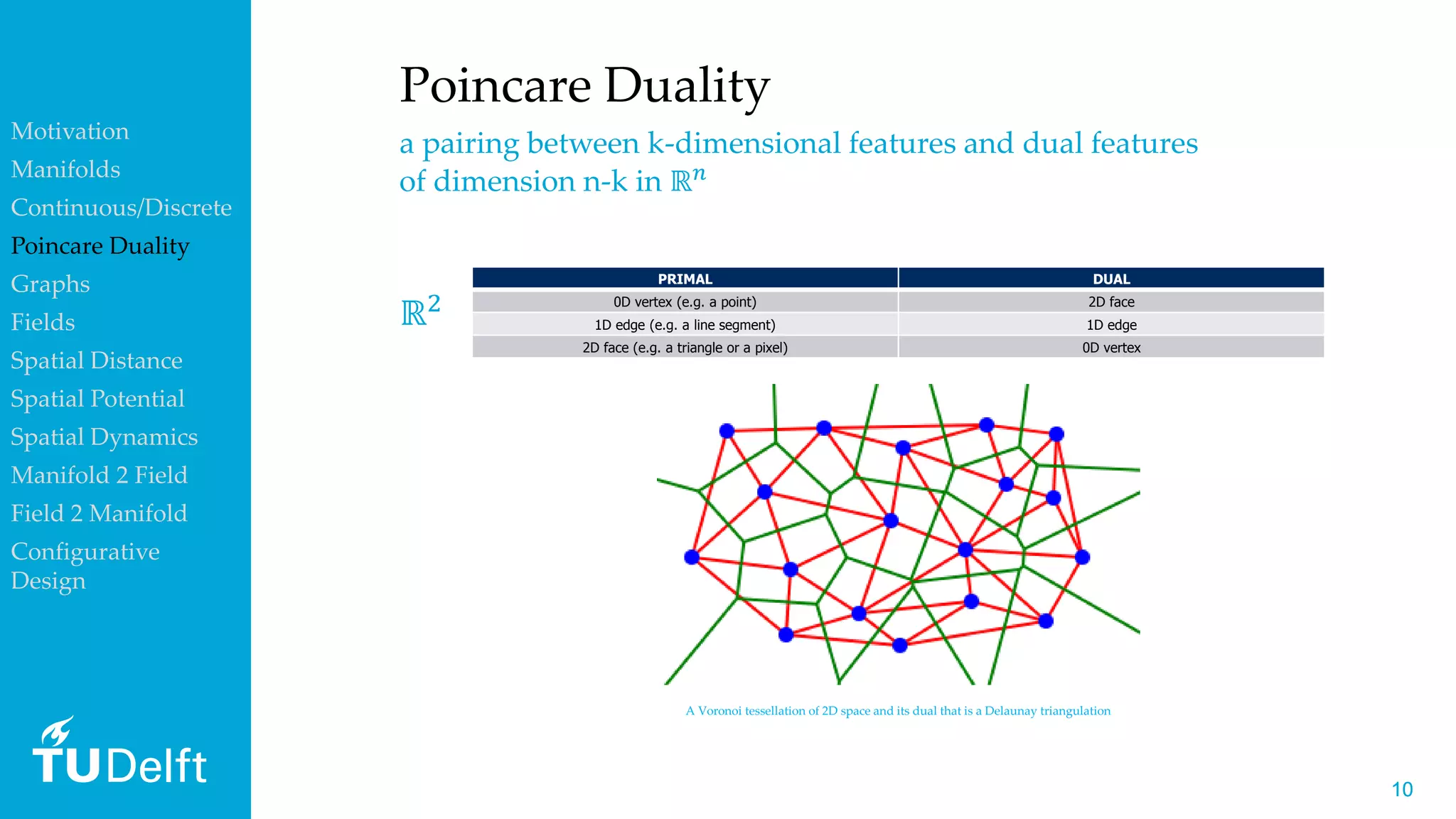
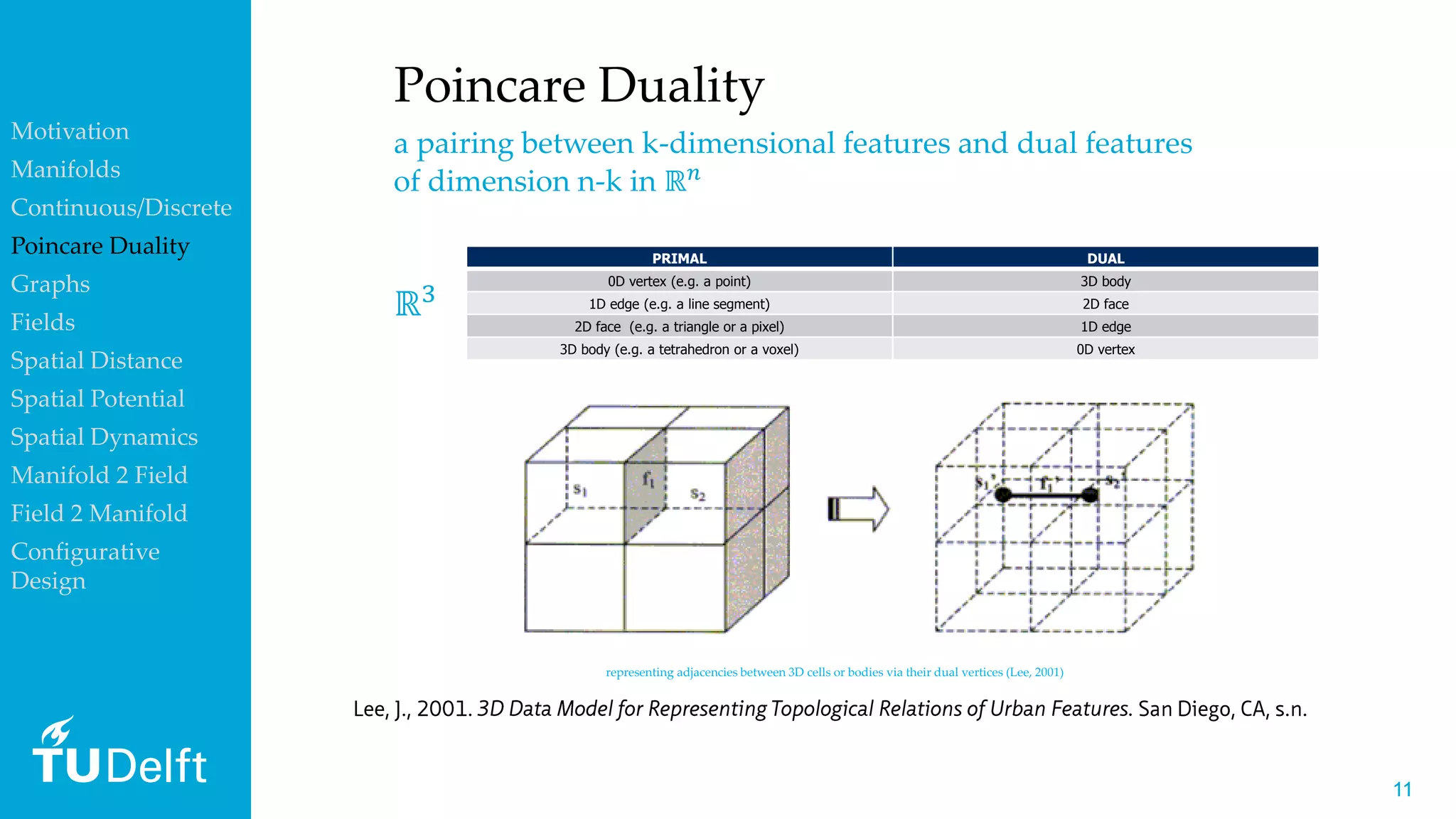
Poincare Duality
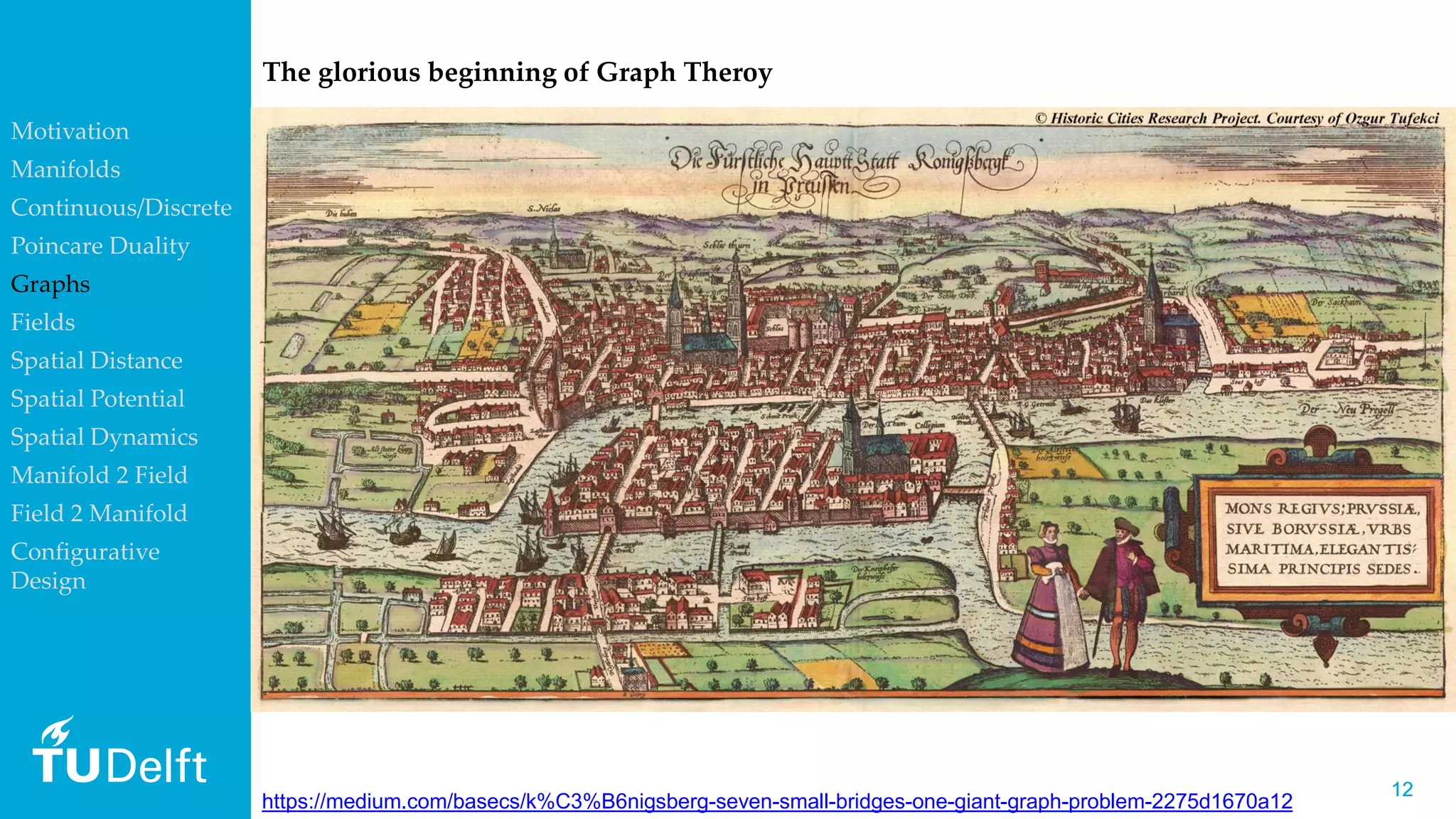
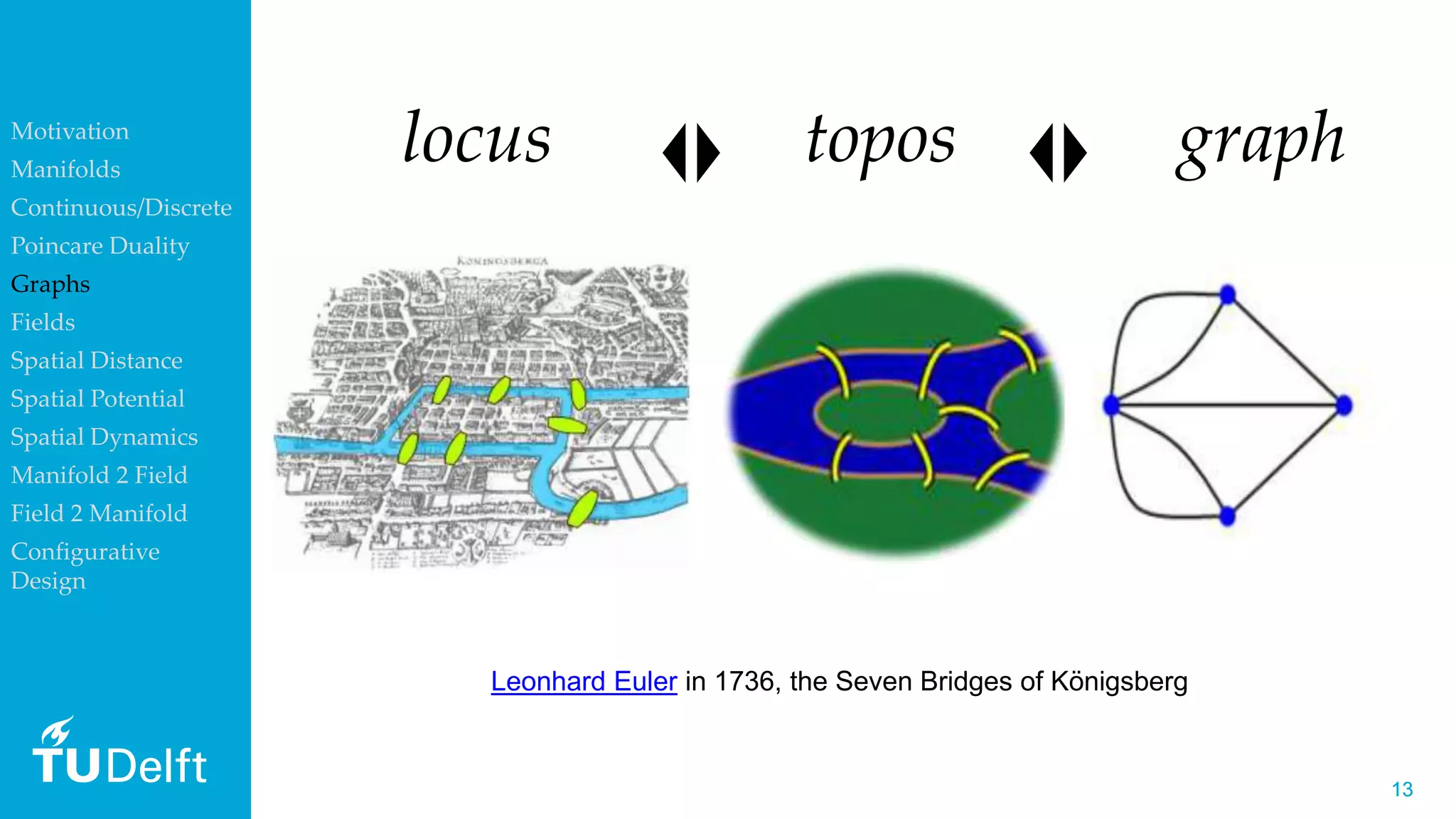
Graphs
Fields
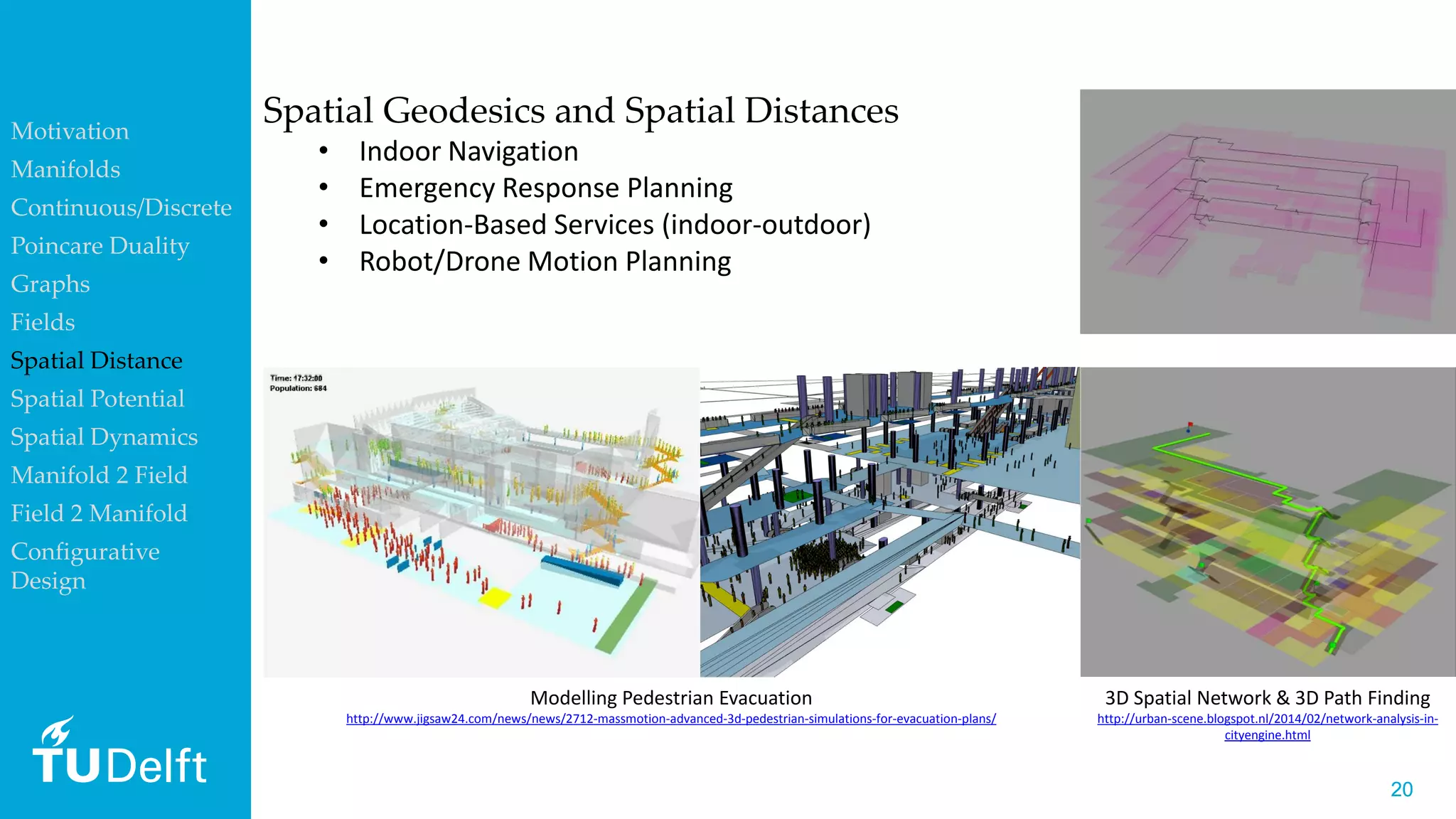
Spatial Distance
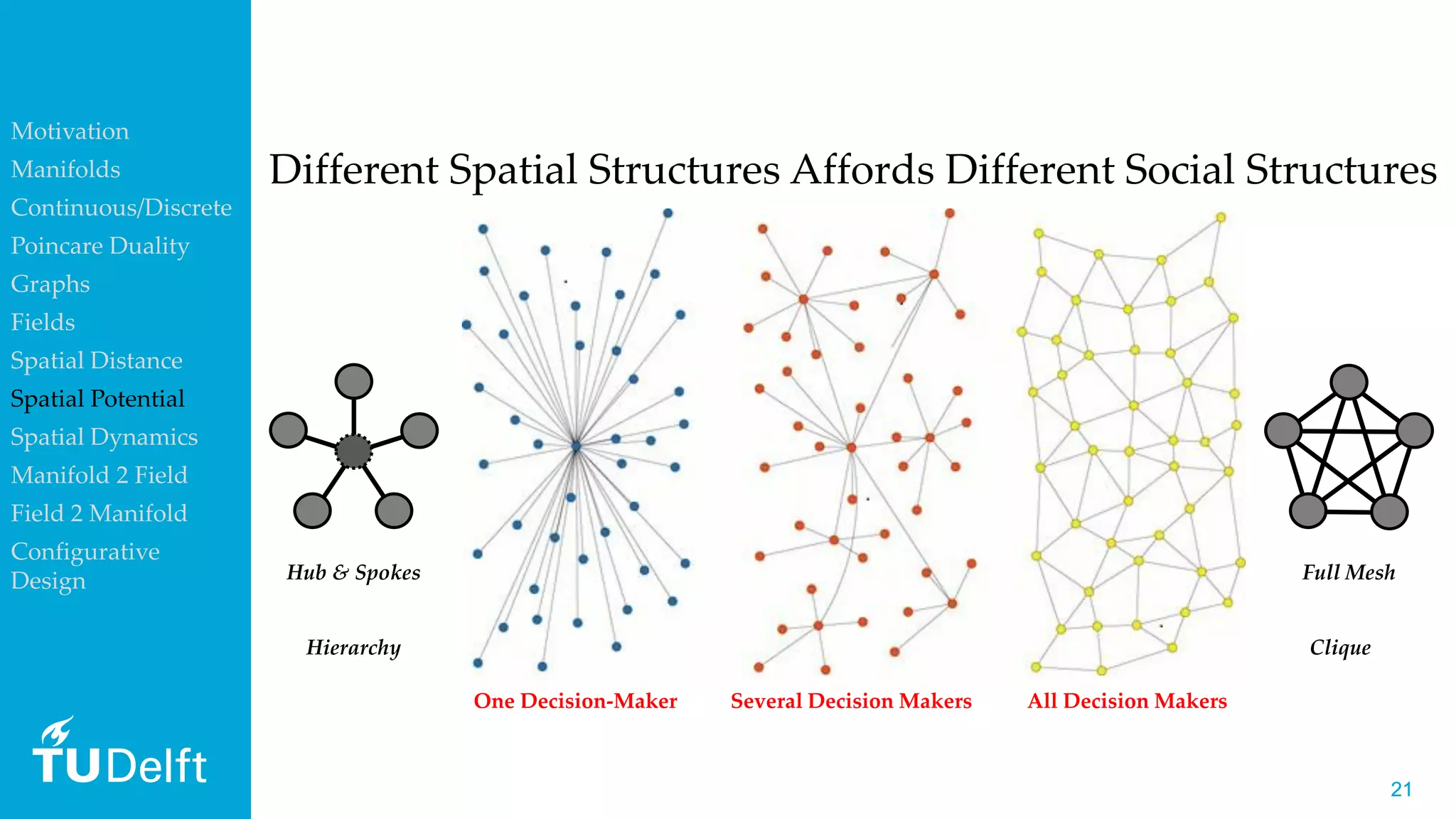
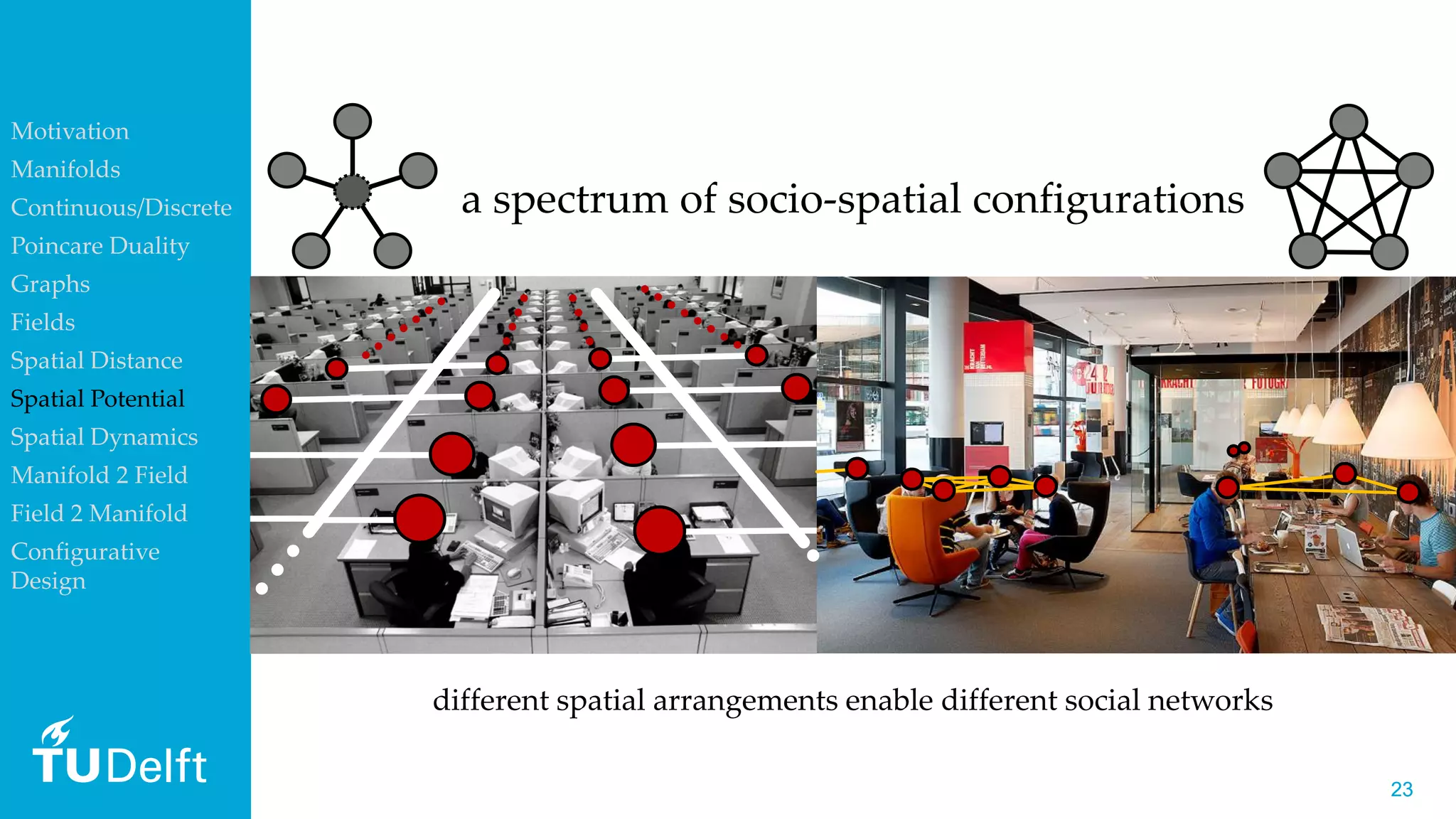
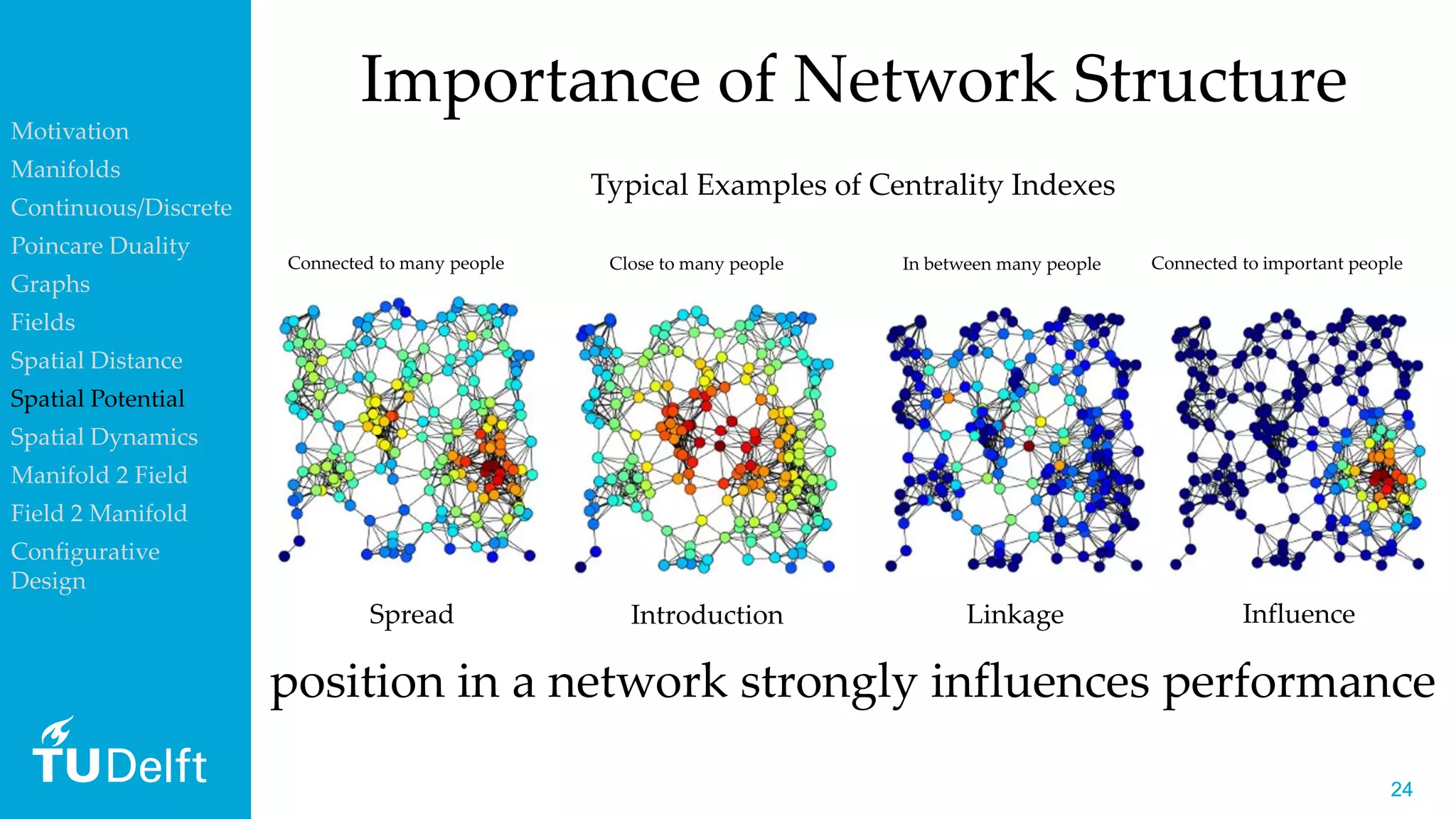
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
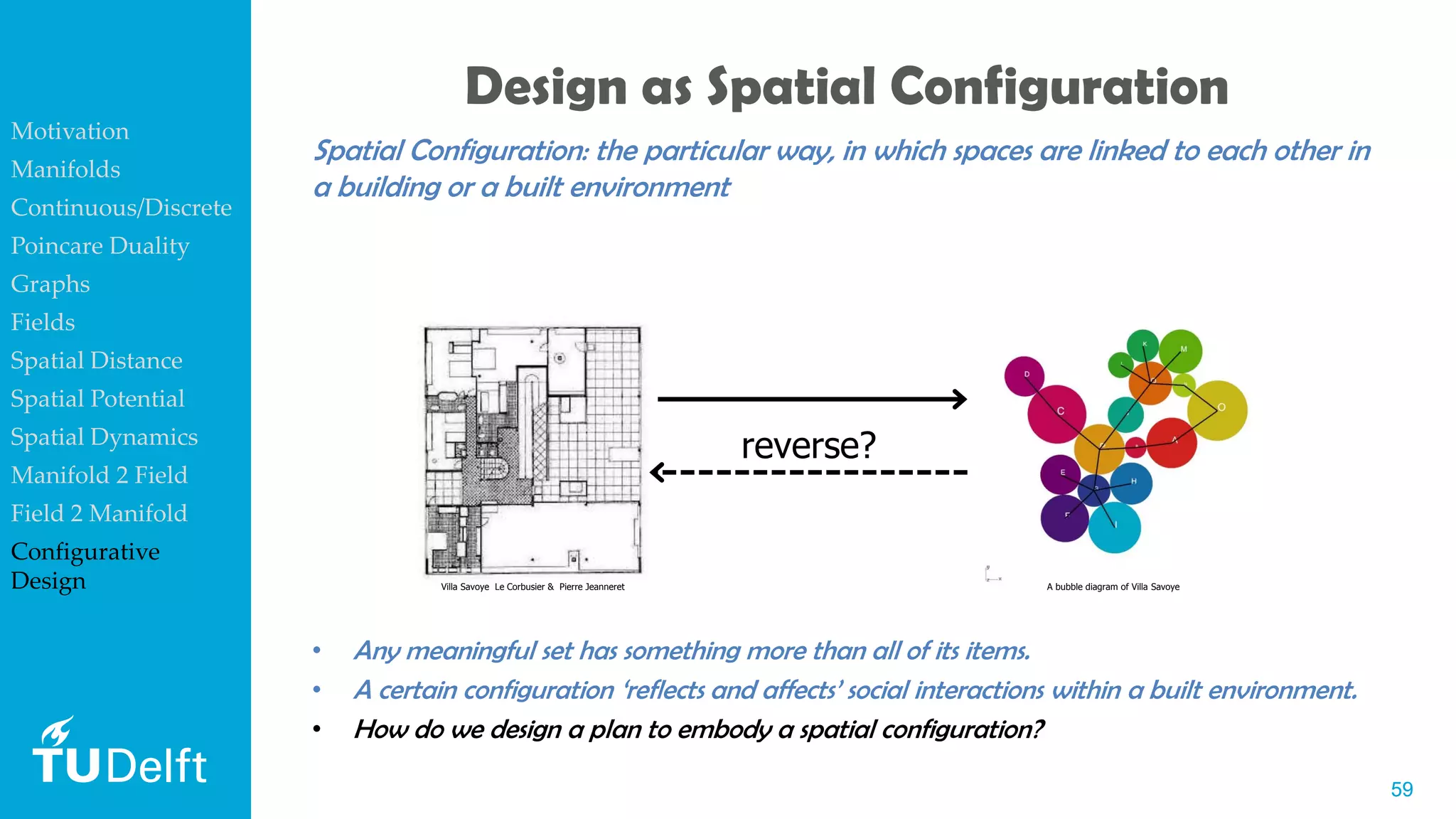
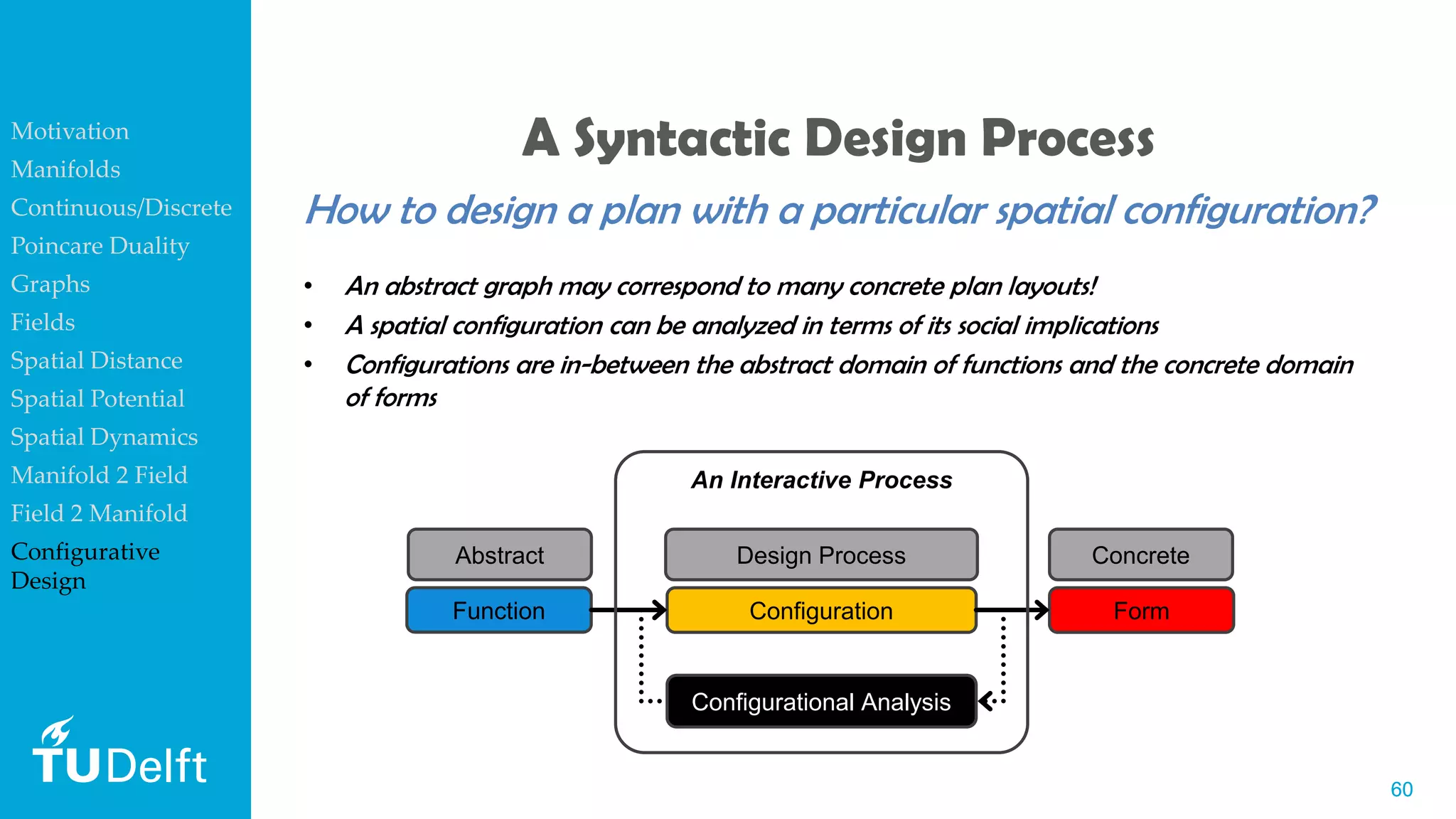
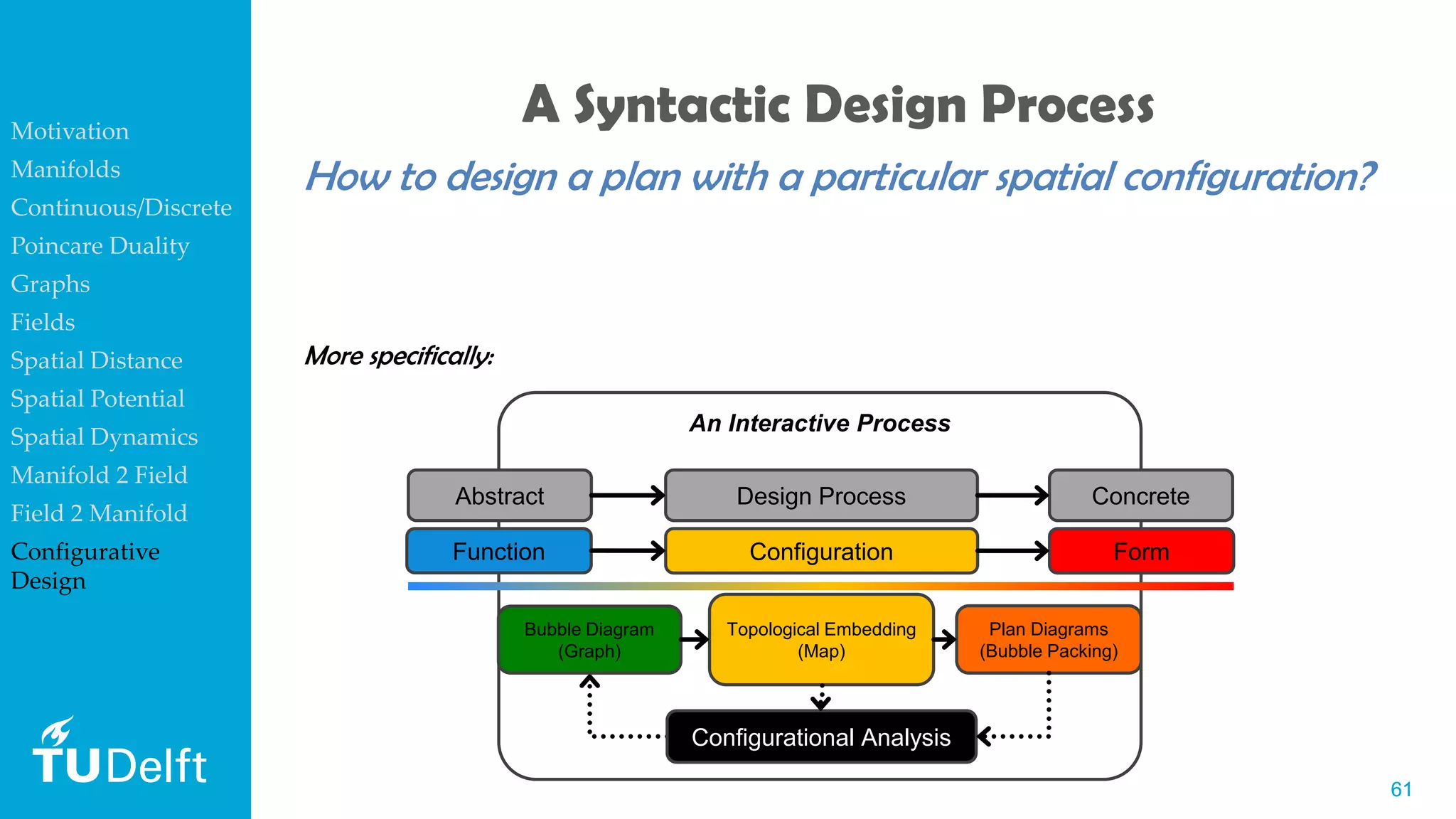
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-7-2048.jpg)

![4040
Point Cloud Rasterization
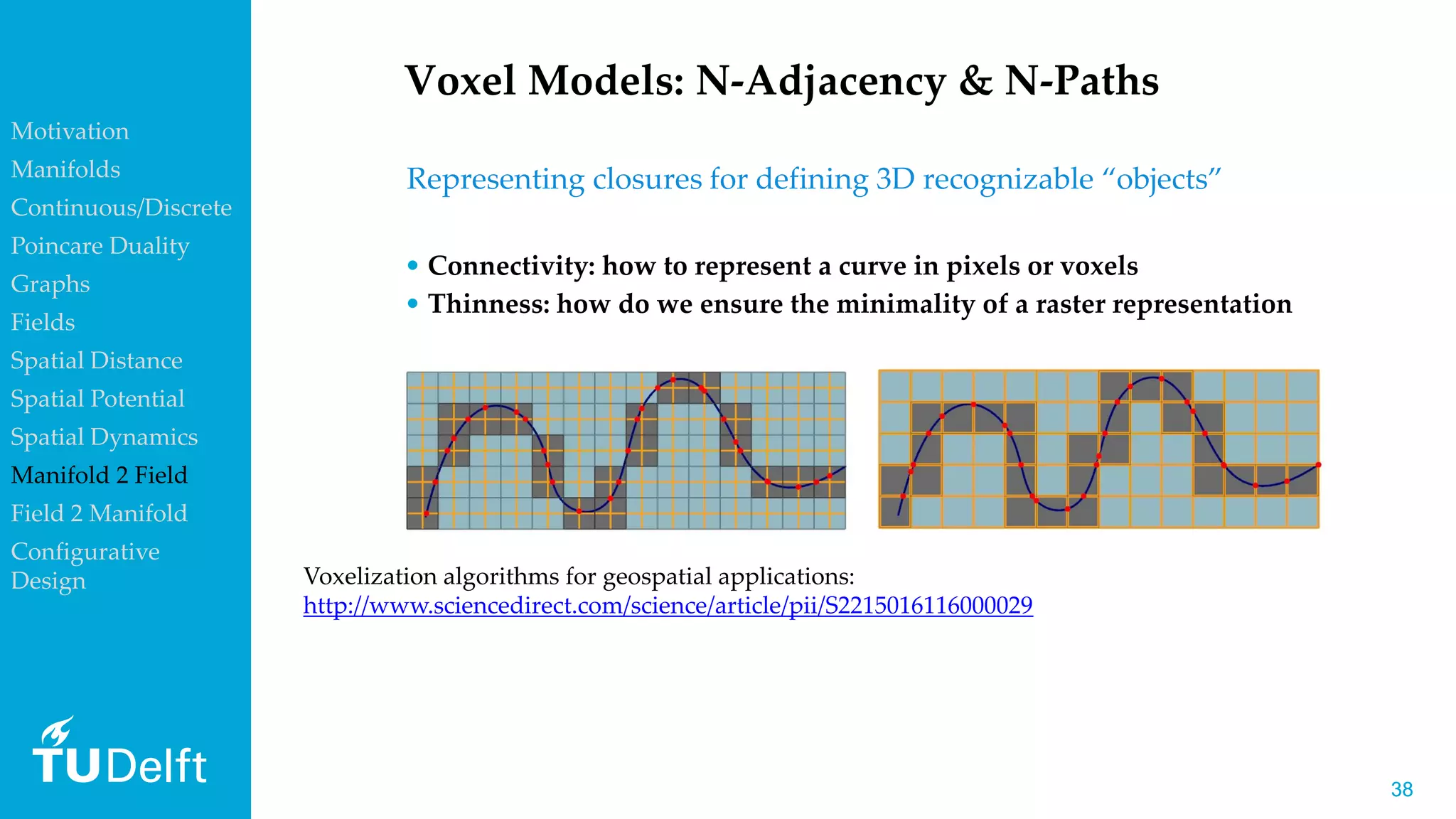
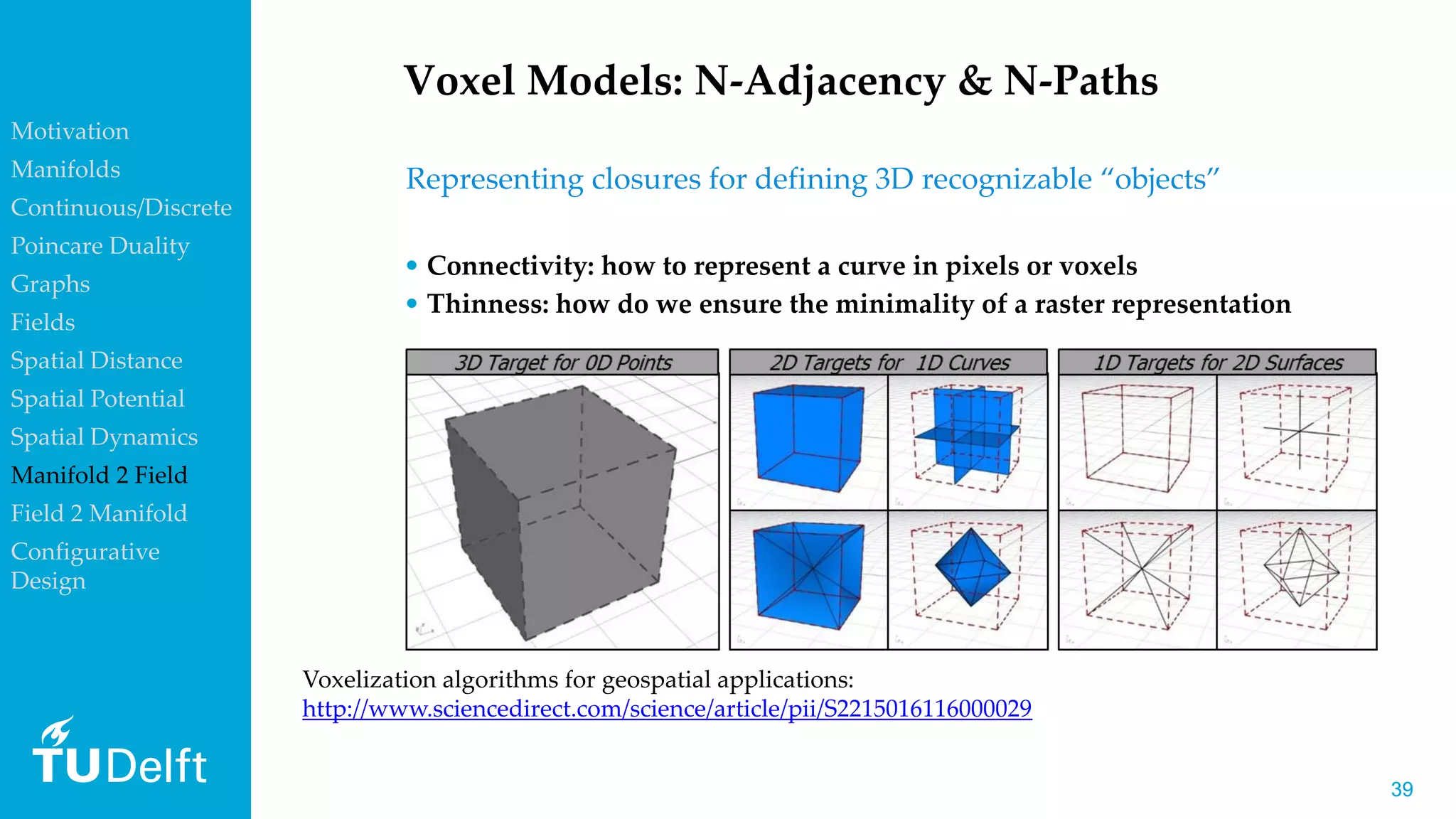
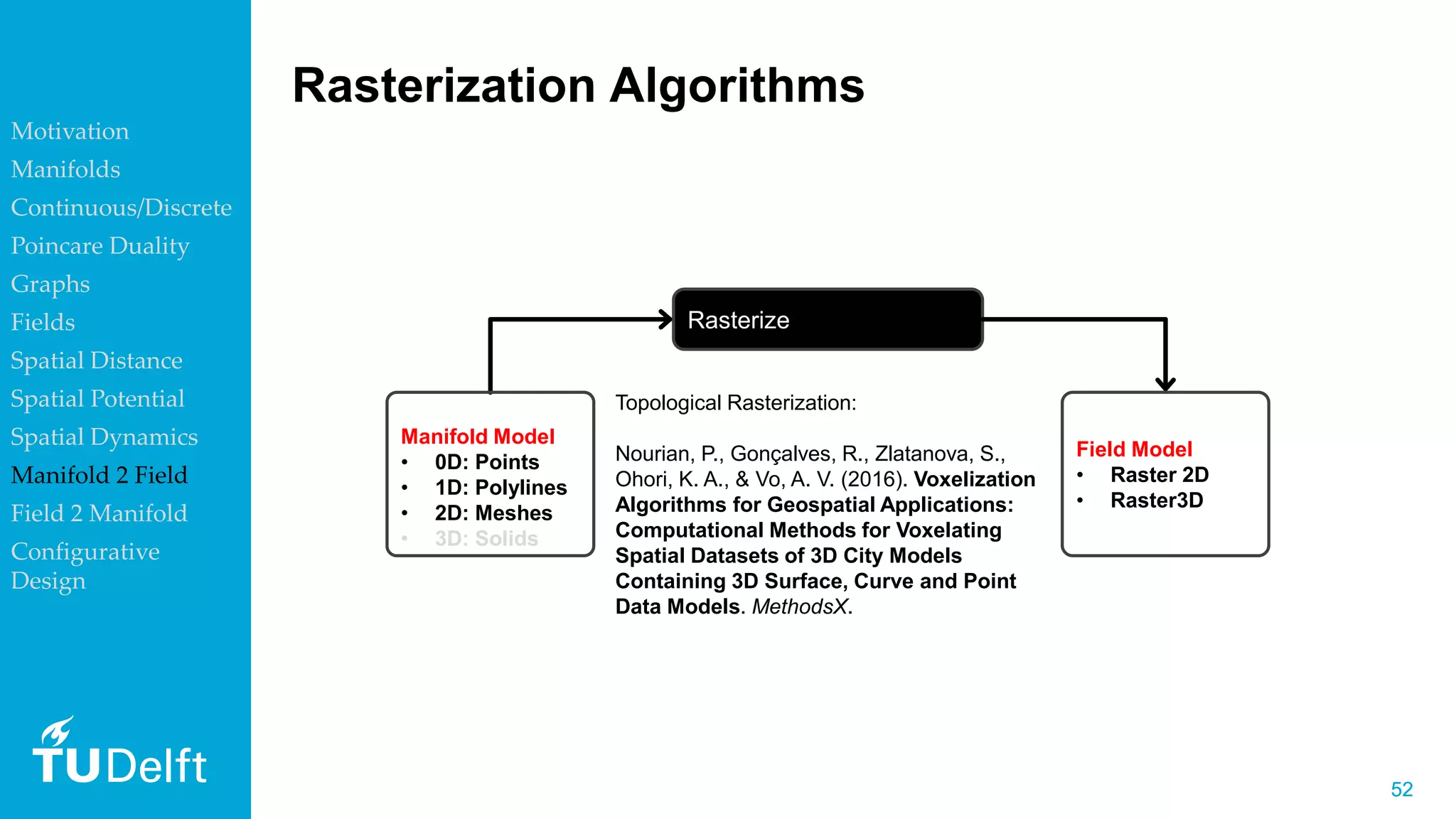
[Topological] Voxelization algorithms for geospatial applications:
http://www.sciencedirect.com/science/article/pii/S2215016116000029
Motivation
Manifolds
Continuous/Discrete
Poincare Duality
Graphs
Fields
Spatial Distance
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-40-2048.jpg)
![4444
Topological Rasterization with Semantics from a BIM model [original model]
Motivation
Manifolds
Continuous/Discrete
Poincare Duality
Graphs
Fields
Spatial Distance
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-44-2048.jpg)
![4545
Topological Rasterization with Semantics from a BIM model [0.5 by 0.5 by 0.5 M]
Motivation
Manifolds
Continuous/Discrete
Poincare Duality
Graphs
Fields
Spatial Distance
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-45-2048.jpg)
![4646
Topological Rasterization with Semantics from a BIM model [0.4 by 0.4 by 0.4 M]
Motivation
Manifolds
Continuous/Discrete
Poincare Duality
Graphs
Fields
Spatial Distance
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-46-2048.jpg)
![4747
Topological Rasterization with Semantics from a BIM model [0.2 by 0.2 by 0.2 M]
Motivation
Manifolds
Continuous/Discrete
Poincare Duality
Graphs
Fields
Spatial Distance
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-47-2048.jpg)
![4848
Topological Rasterization with Semantics from a BIM model [0.1 by 0.1 by 0.1 M]
Motivation
Manifolds
Continuous/Discrete
Poincare Duality
Graphs
Fields
Spatial Distance
Spatial Potential
Spatial Dynamics
Manifold 2 Field
Field 2 Manifold
Configurative
Design](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-48-2048.jpg)
![CONFIGURBANIST Urban Configuration Analysis
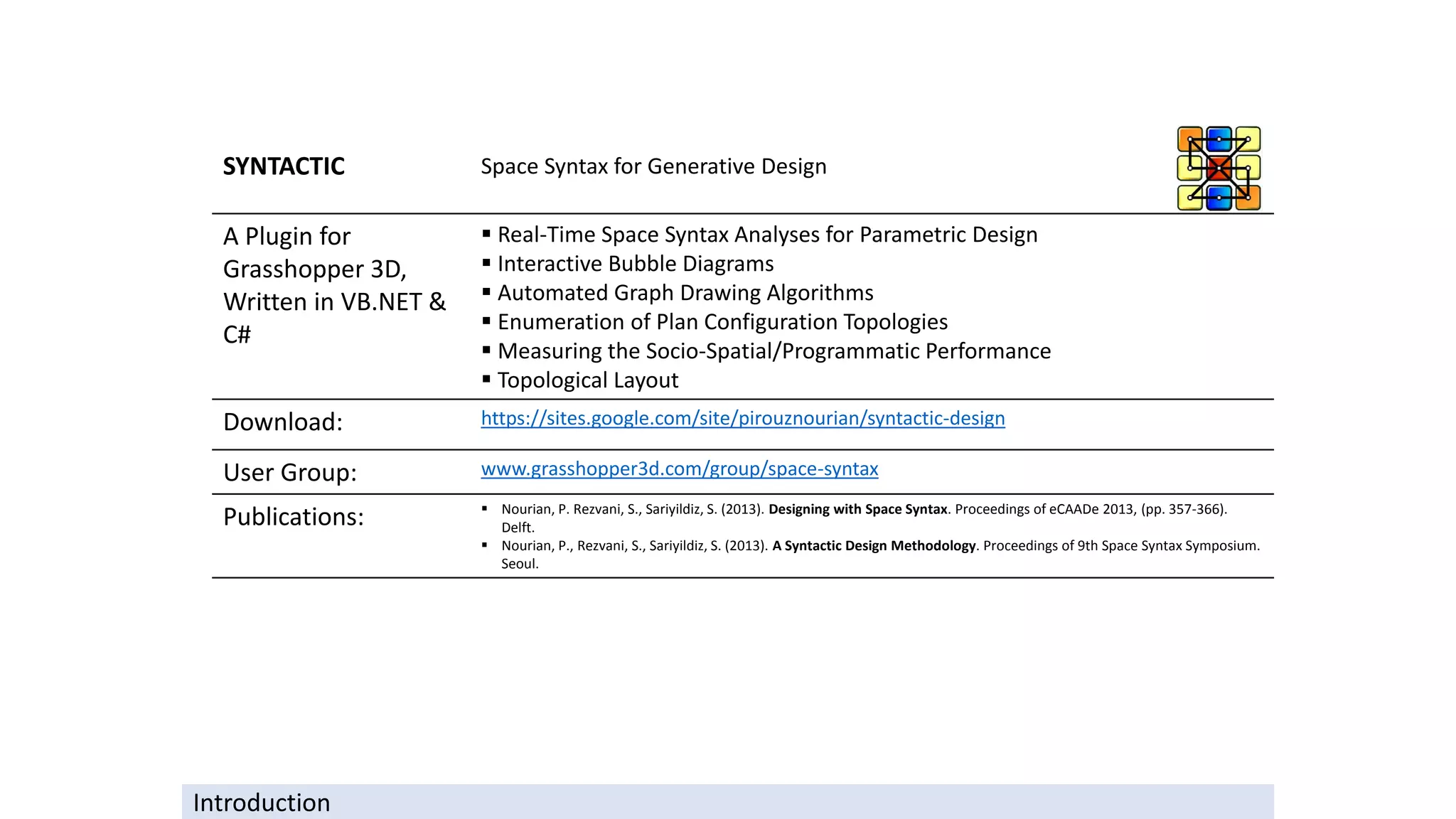
A Plugin for
Grasshopper 3D,
Written in C# & VB.NET
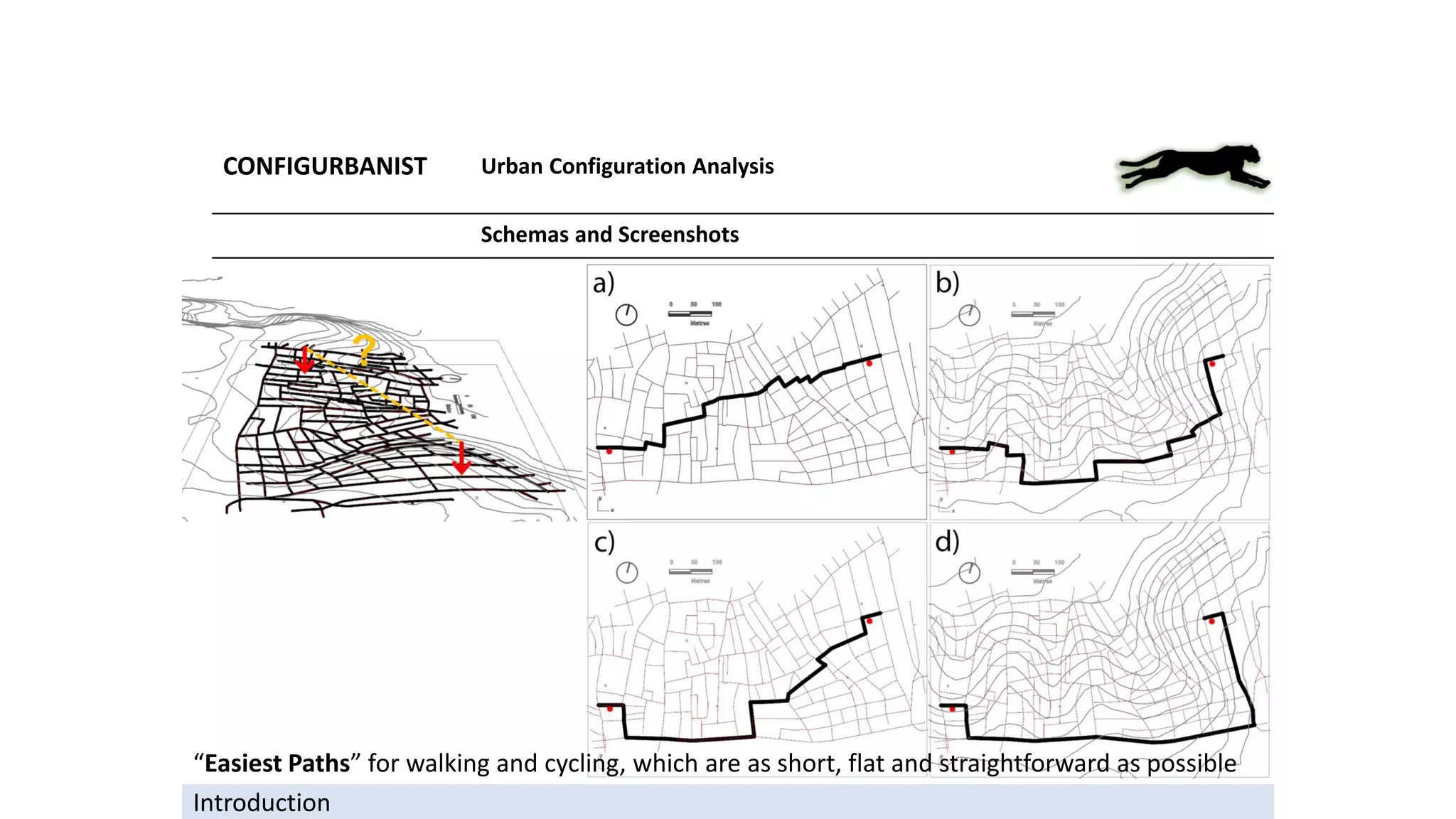
▪ Easiest Paths for Walking and Cycling
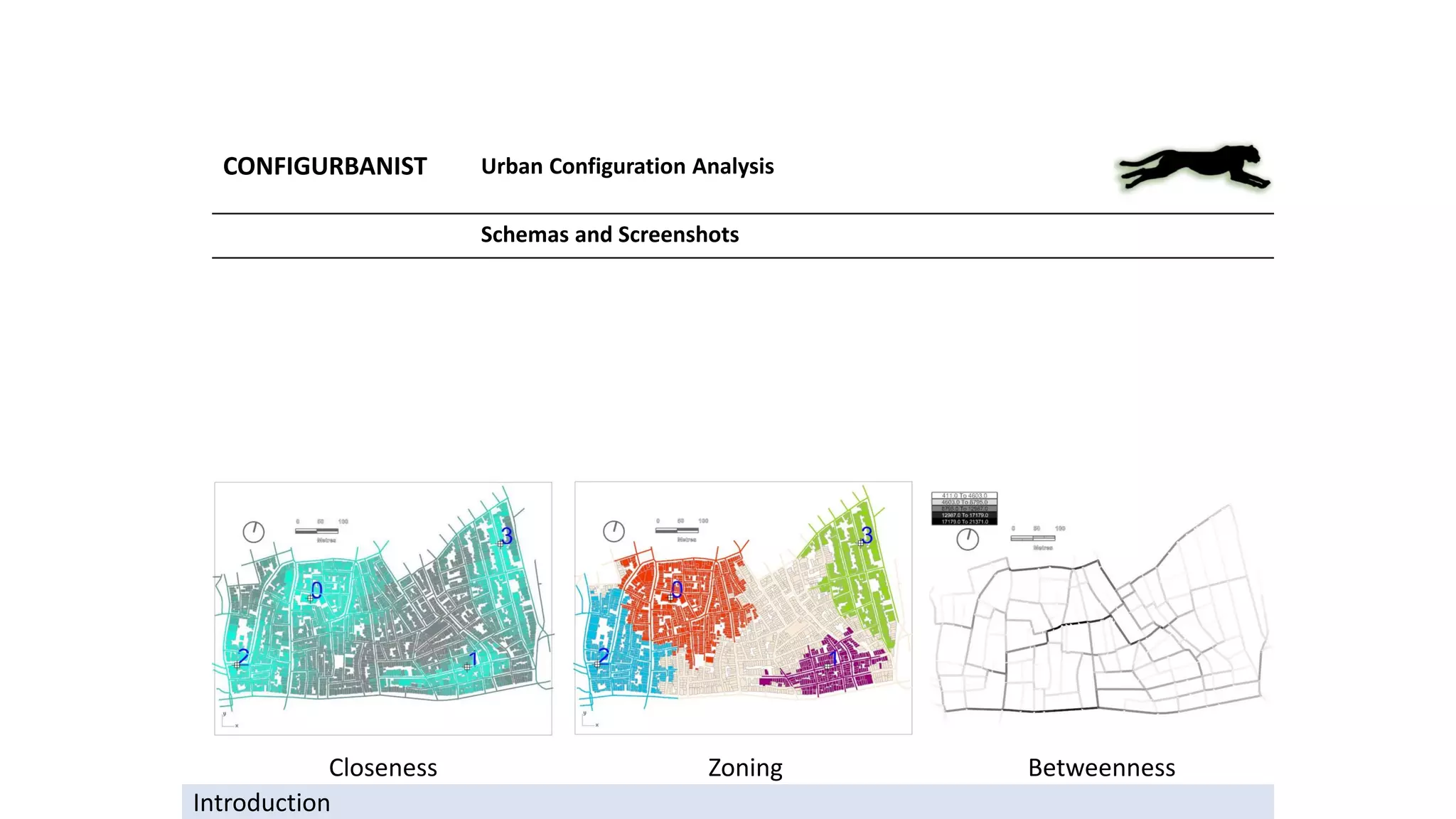
▪ Network Centrality Analysis
▪ Fuzzy Accessibility Analysis of POI
▪ Polycentric Distributions
▪ Spatial Network Analysis
▪ Zoning for Facility Location Planning
Download: https://sites.google.com/site/pirouznourian/configurbanist
User Group: www.grasshopper3d.com/group/cheetah
Publications: ▪ Nourian, P, van der Hoeven, F, Sariyildiz, S, Rezvani, S, (2016) Spectral Modelling of Spatial Networks, SimAUD, UCL,
London, ACM press, Accepted.
▪ Nourian, P, van der Hoeven, F, Rezvani, S, Sariyildiz, S, (2016) Supporting Bipedalism: Computational Analysis of Walking
and Cycling Accessibility for Geodesign Workflows, RIUS Research in Urbanism Series, GEODESIGN, TU Delft, Accepted.
▪ Nourian, P., Rezvani, S., Sariyildiz, S, van der Hoeven, F. (2015). CONFIGURBANIST - Urban Configuration Analysis for
Walking and Cycling via Easiest Paths, proceedings of the 33rd eCAADe
▪ Nourian, P., van der Hoeven, F, Rezvani, S., Sariyildiz, S. (2015). Easiest paths for walking and cycling: Combining syntactic
and geographic analyses in studying walking and cycling mobility, proceedings of the 10th Space Syntax Symposium, UCL,
London [URL]
Introduction](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-71-2048.jpg)
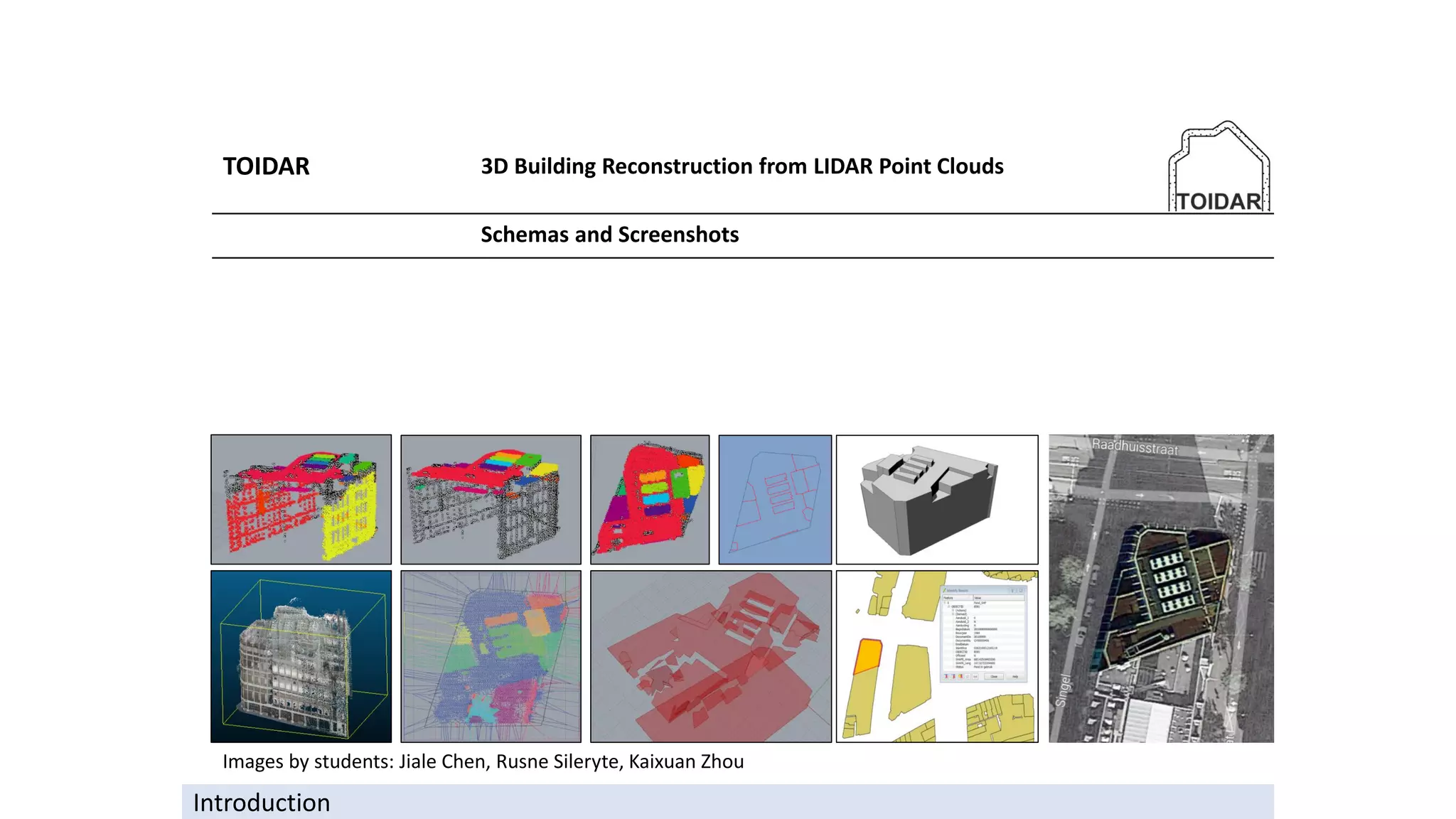
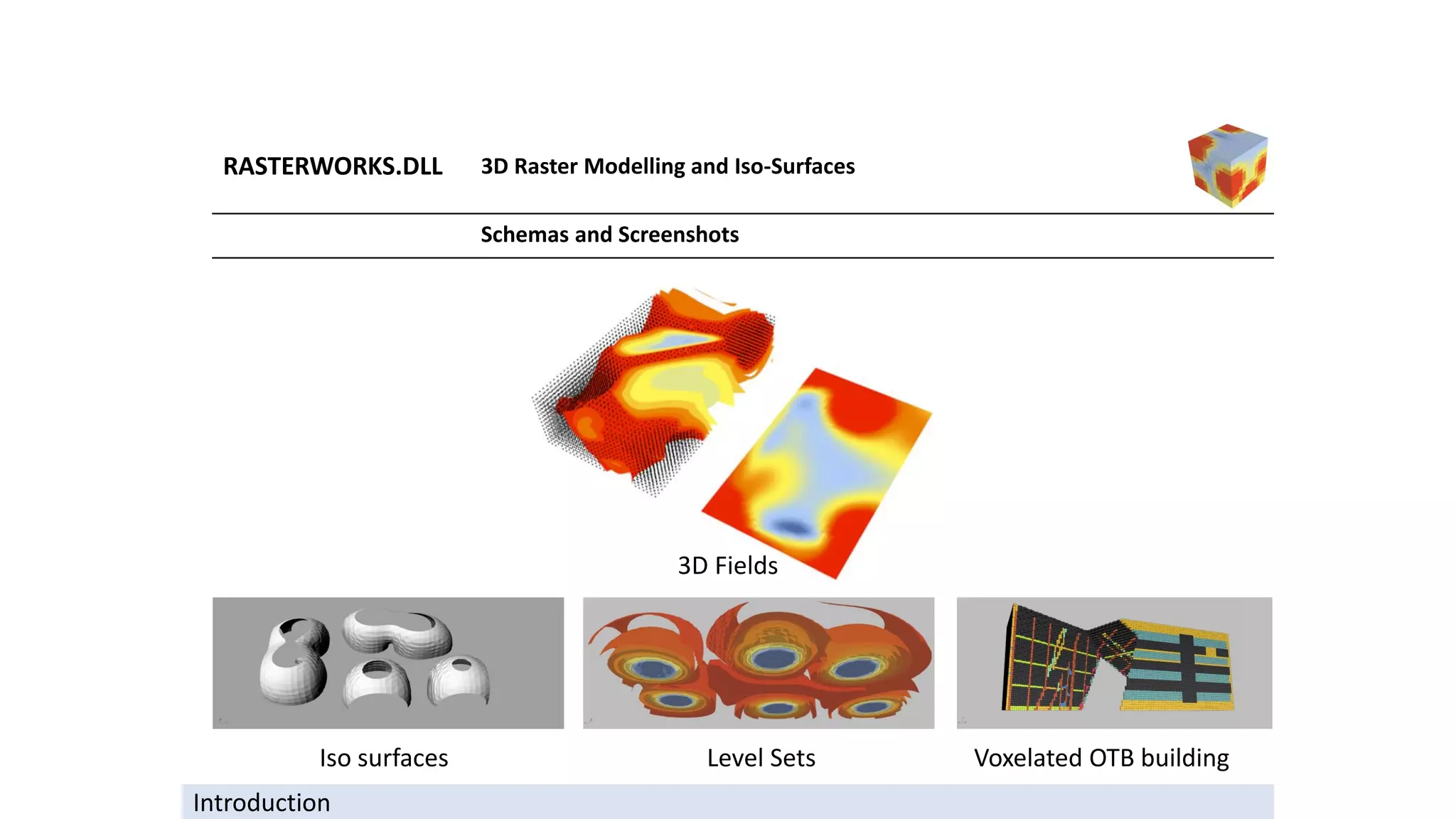
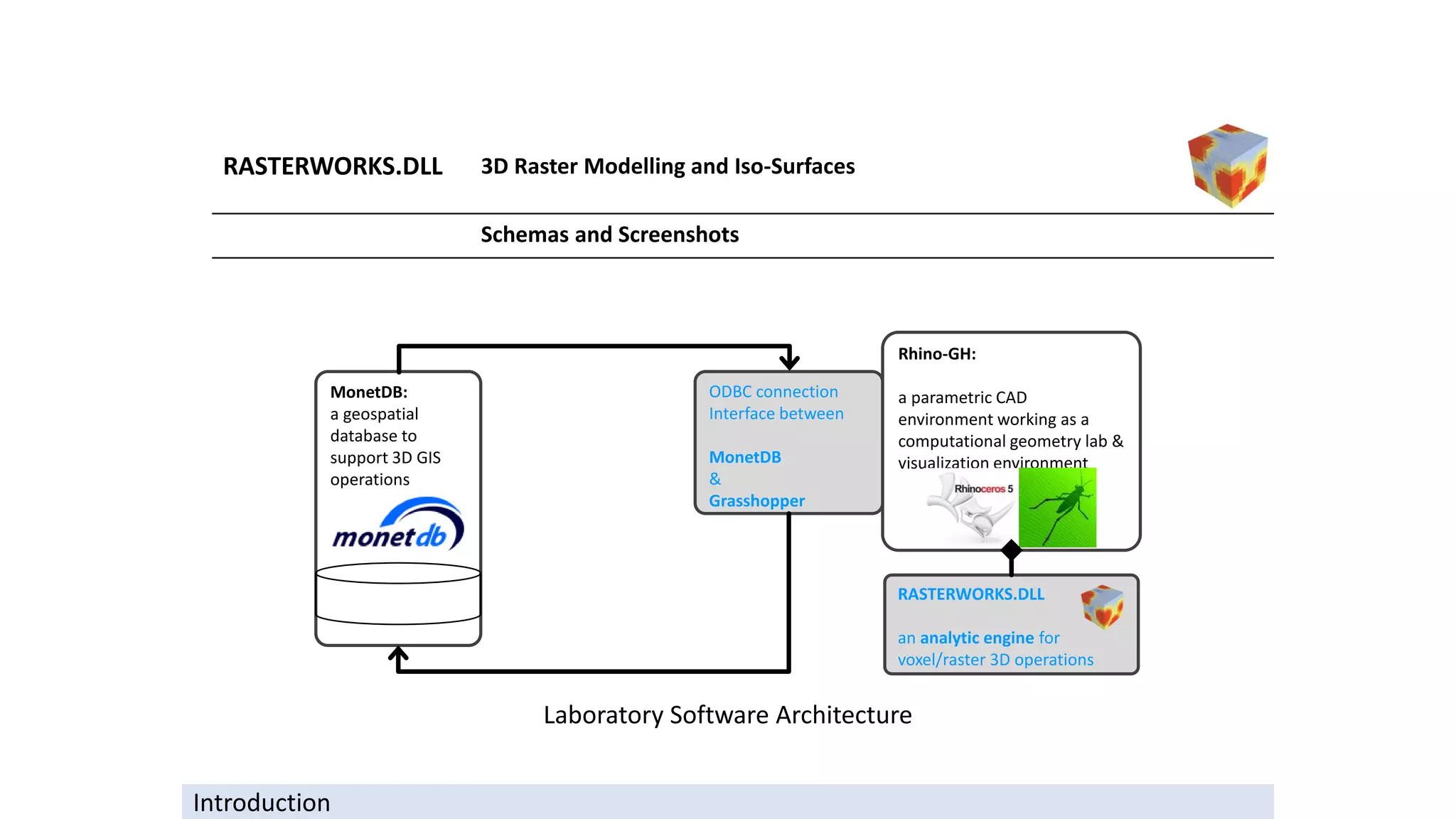
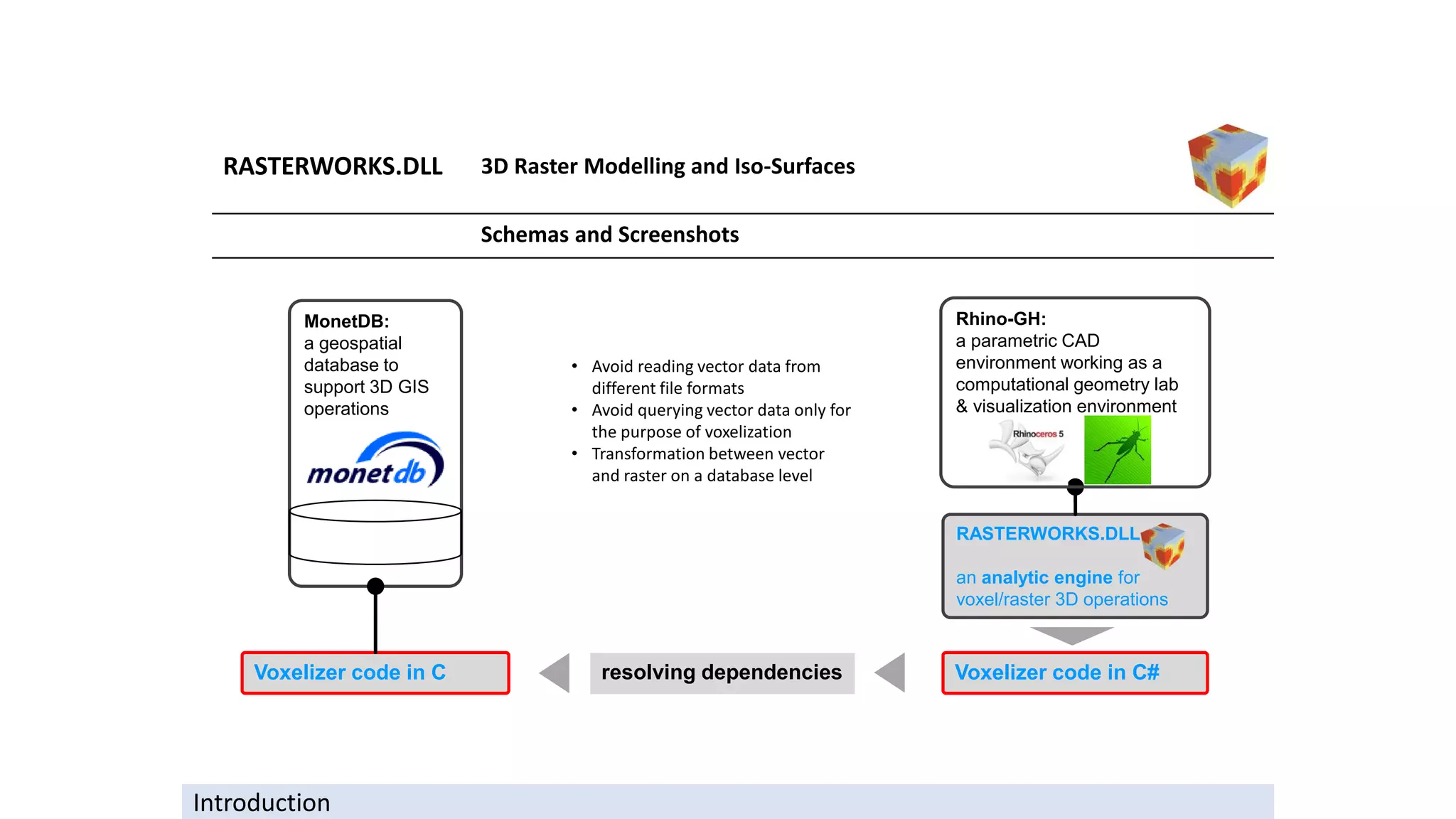
![RASTERWORKS.DLL 3D Raster Modelling and Iso-Surfaces
A Library for
Grasshopper 3D &
MonetDB, written in
C#, C++, C
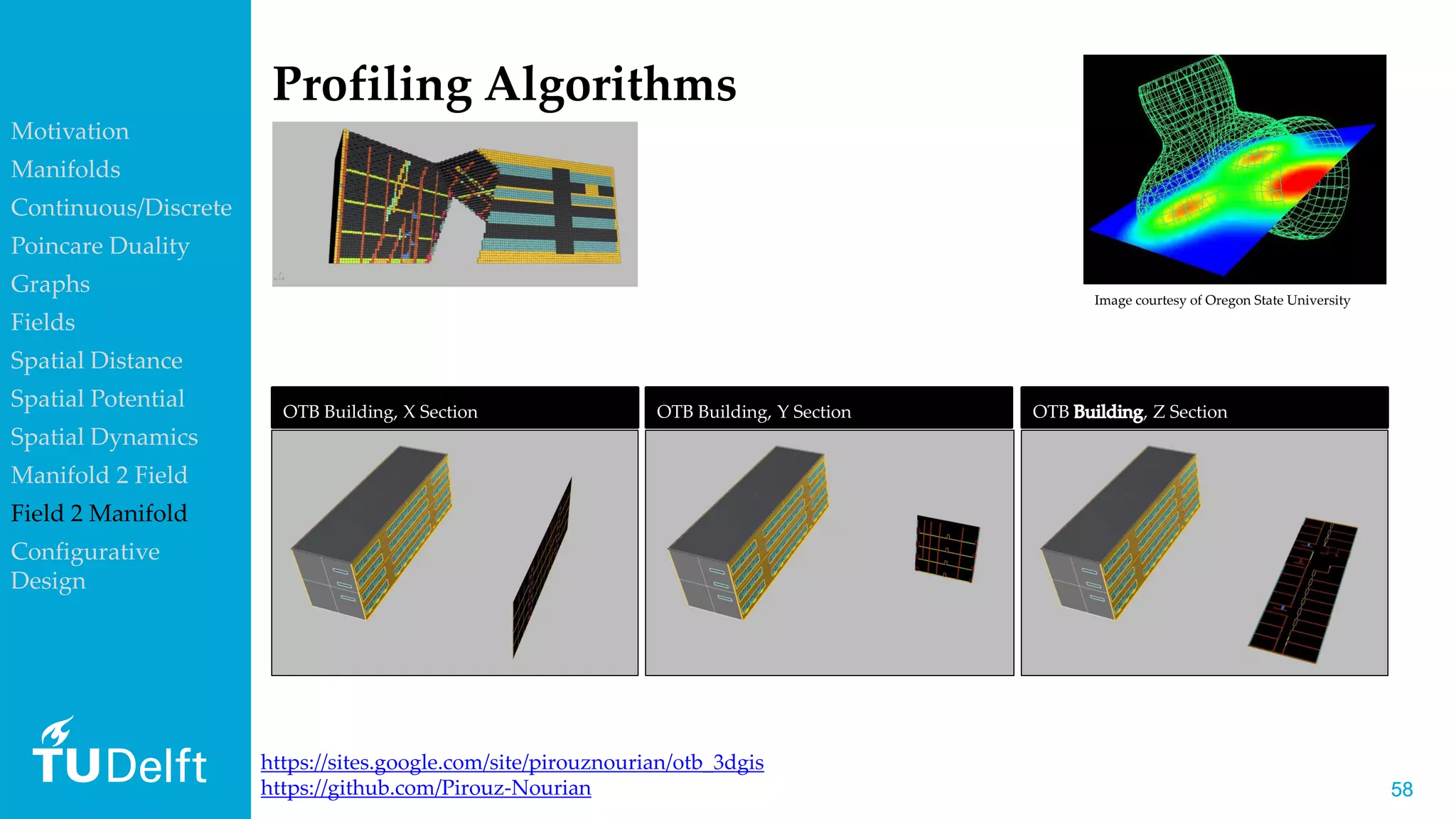
▪ Topological Voxelation Tools
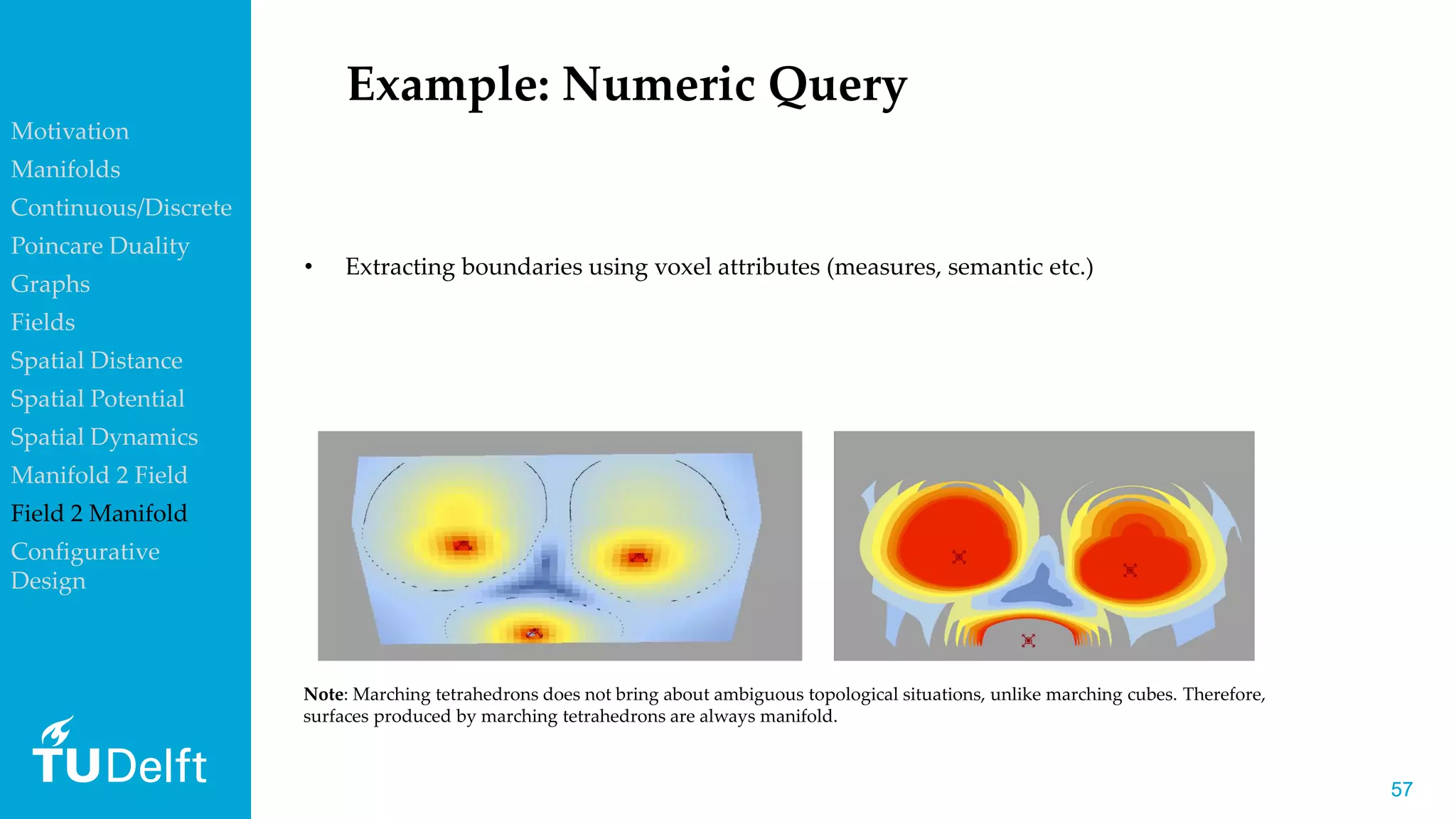
▪ Vector3D to Raster3D Operations & Raster specific queries
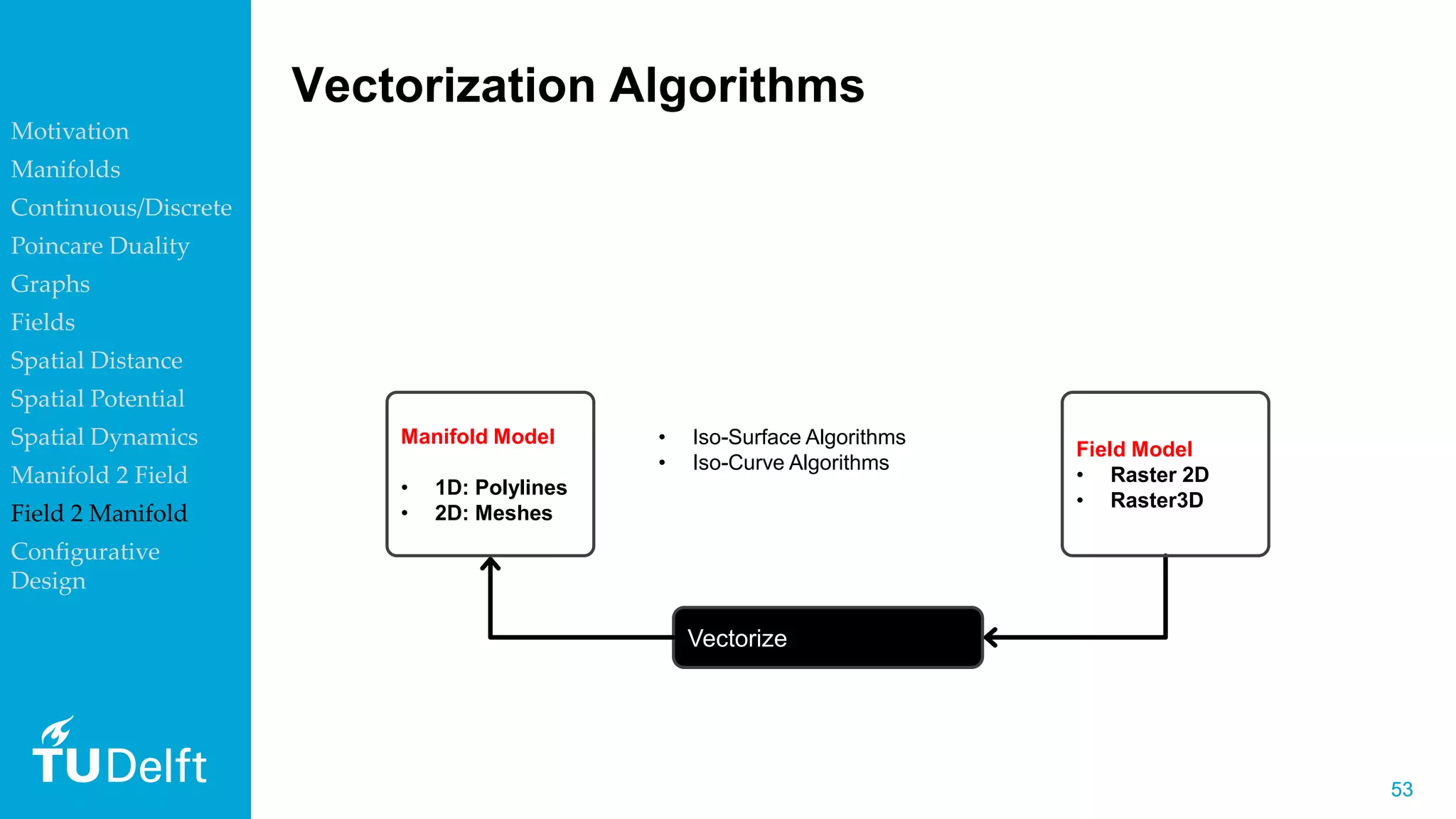
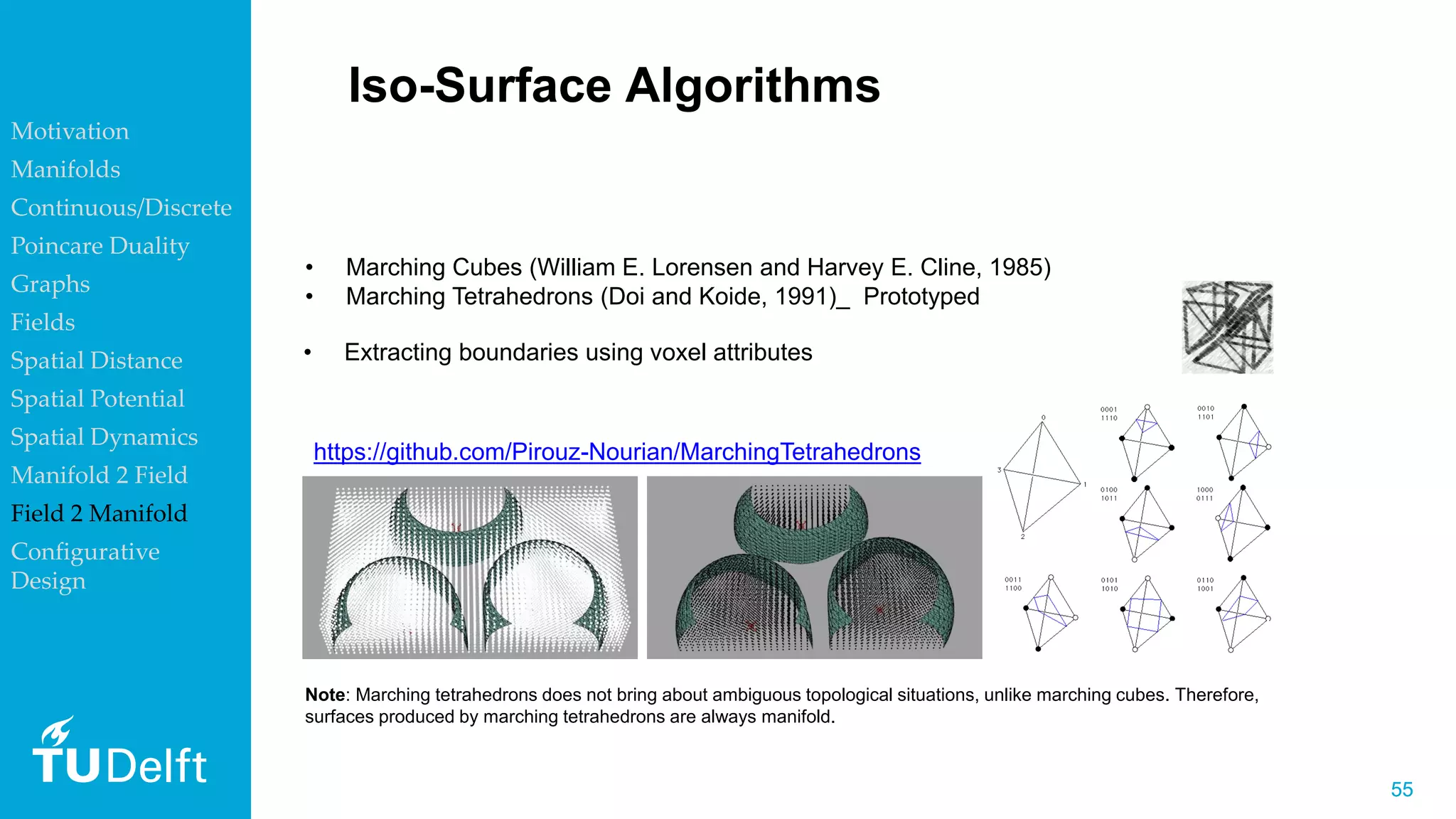
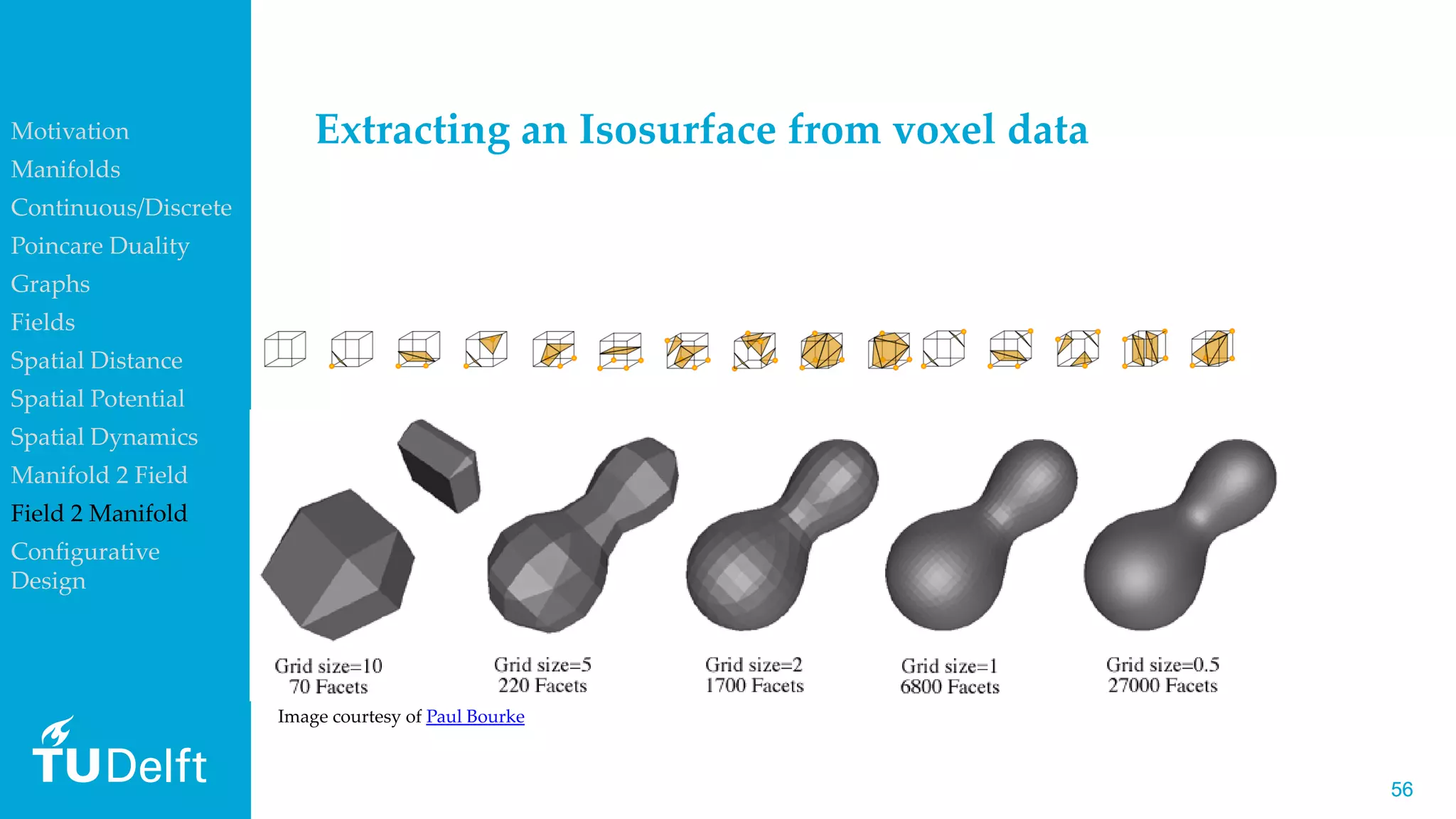
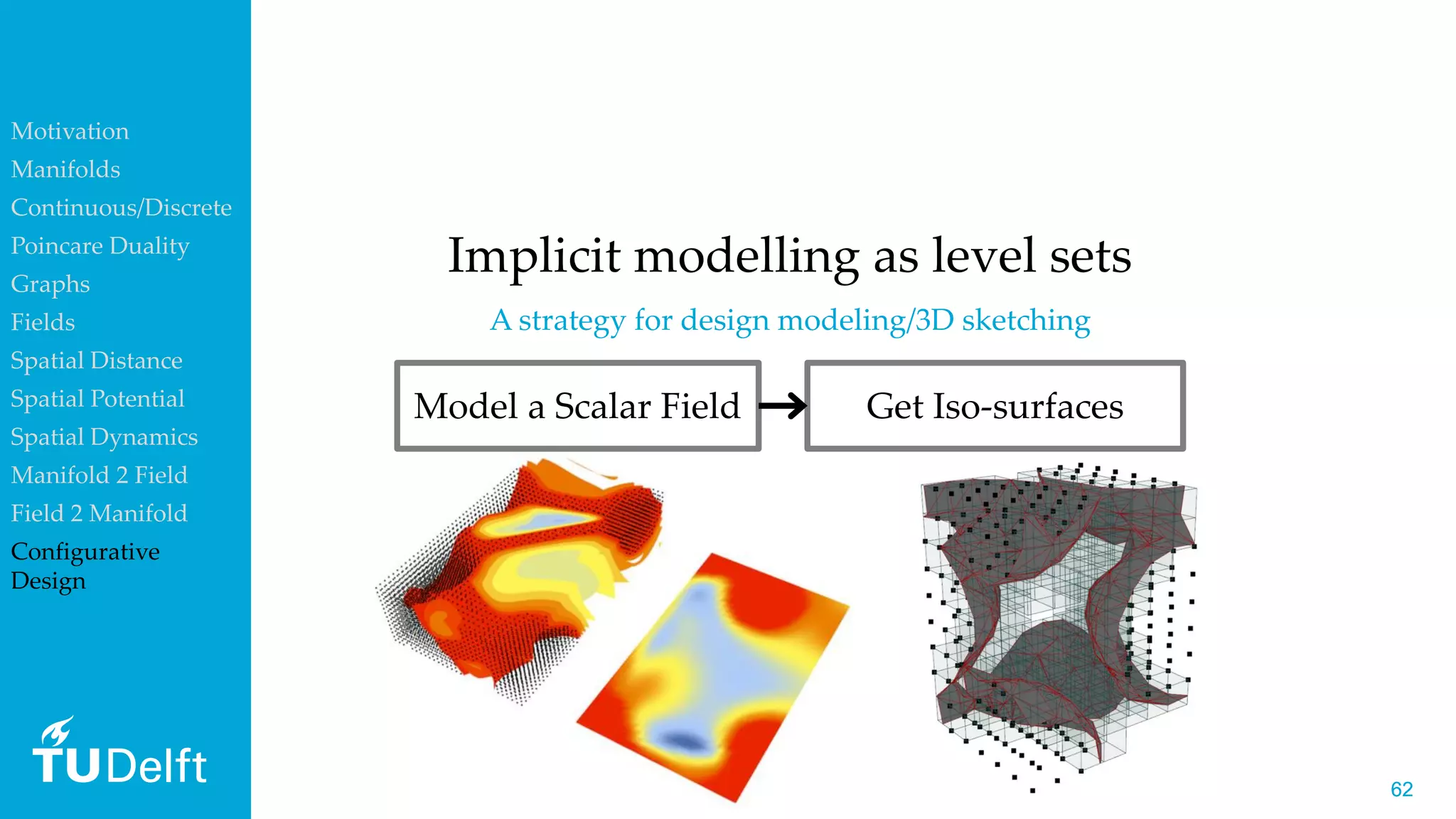
▪ Raster3D to Vector3D Operations (Level-Sets & Iso-Surfaces)
Download: https://github.com/NLeSC/geospatial-voxels
https://github.com/Pirouz-Nourian/MarchingTetrahedrons
https://github.com/Pirouz-Nourian/Topological_Voxelizer_CSharp
Contributors: Dr. Sisi Zlatanova, Dr. Romulo Goncalves, Dr. Ken Arroyo Ahori, Ir. Anh Vu Vo
Publications: ▪ Nourian, P, Goncalves, R, Zlatanova, S, Arroyo Ahori, Vo, A.V., (2016) Voxelization Algorithms for Geospatial
Applications, MethodsX, Elsevier [URL]
▪ Zlatanova, S, Nourian, P, Goncalves, R, Vo, A.V., (2016) TOWARDS 3D RASTER GIS: ON DEVELOPING A RASTER ENGINE
FOR SPATIAL DBMS, proceedings of ISPRS WG IV/2 Workshop “Global Geospatial Information and High Resolution Global
Land Cover/Land Use Mapping”, April 21, 2016, Novosibirsk, Russian Federation, [URL]
▪ Goncalves, R, Ivanova, M, Kersten, M, Scholten, H, Zlatanova, S , Alvanaki, F, Nourian, P & Dias, E (2014, November 3). Big
Data analytics in the Geo-Spatial Domain. Groningen, Big Data Across Disciplines: In Search of Symbiosis, conference 3-5
November 2014. [URL]
Funding: Grant number 027.013.703 from NLeSC
Introduction](https://image.slidesharecdn.com/ar1twf030lecture2-171208201246/75/Ar1-twf030-lecture2-2-77-2048.jpg)













































![Chapter4_Initiation_of_Sediment_Motion_v2[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapter4initiationofsedimentmotionv21-251208223747-f94ef163-thumbnail.jpg?width=640&height=640&fit=bounds)















