Troubleshooting, Tips, andTricks
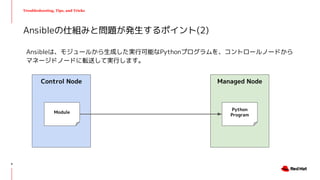
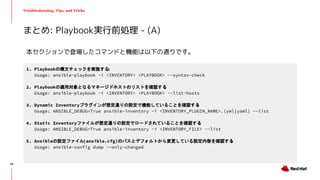
Ansibleは、モジュールから生成した実行可能なPythonプログラムを、コントロールノードから
マネージドノードに転送して実行します。
Ansibleの仕組みと問題が発生するポイント(2)
Control Node Managed Node
Module
Python
Program
9
10.
Managed node
Remote tmpdirectory
Remote tmp directory
Troubleshooting, Tips, and Tricks
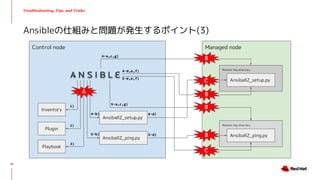
Ansibleの仕組みと問題が発生するポイント(3)
Control node
Playbook
Inventory
AnsiballZ_setup.py
AnsiballZ_ping.py
AnsiballZ_setup.py
AnsiballZ_ping.py
Plugin
2)
1)
3)
4-b)
5-b)
4-d)
4-d,e,f)
5-d)
5-d,e,f)
A
C
C
4-a,c,g)
5-a,c,g)
B
B
B
B
10
11.
Troubleshooting, Tips, andTricks
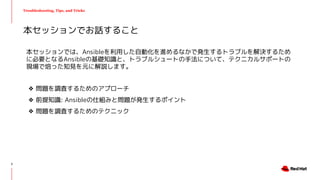
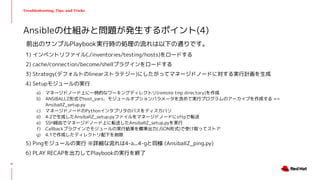
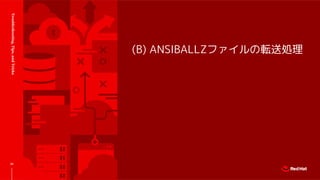
前出のサンプルPlaybook実行時の処理の流れは以下の通りです。
1) インベントリファイル(./inventories/testing/hosts)をロードする
2) cache/connection/become/shellプラグインをロードする
3) Strategy(デフォルトのlinearストラテジー)にしたがってマネージドノードに対する実行計画を生成
4) Setupモジュールの実行
a) マネージドノード上に一時的なワーキングディレクトリ(remote tmp directory)を作成
b) ANSIBALLZ形式でhost_vars、モジュールオプションパラメータを含めて実行プログラムのアーカイブを作成する =>
AnsiballZ_setup.py
c) マネージドノードのPythonインタプリタのパスをディスカバリ
d) 4.2で生成したAnsiballZ_setup.pyファイルをマネージドノードにsftpで転送
e) SSH経由でマネージドノード上に転送したAnsiballZ_setup.pyを実行
f) Callbackプラグインでモジュールの実行結果を標準出力(JSON形式)で受け取ってストア
g) 4.1で作成したディレクトリ配下を削除
5) Pingモジュールの実行 ※詳細な流れは4-a...4-gと同様 (AnsiballZ_ping.py)
6) PLAY RECAPを出力してPlaybookの実行を終了
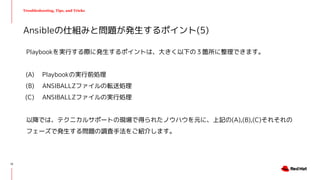
Ansibleの仕組みと問題が発生するポイント(4)
11
Troubleshooting, Tips, andTricks
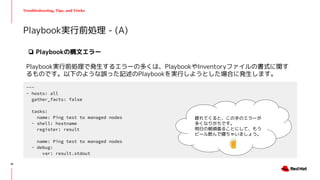
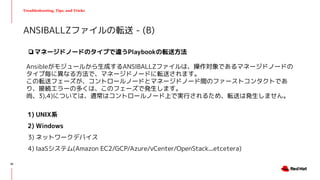
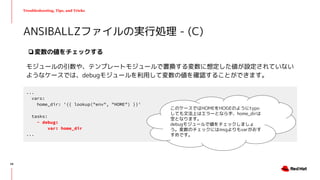
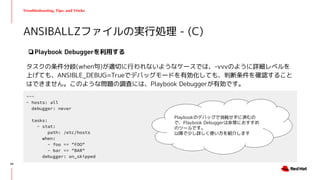
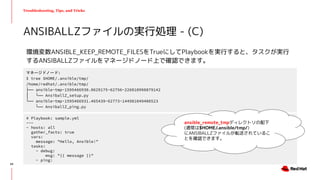
❏ Playbookの構文エラー
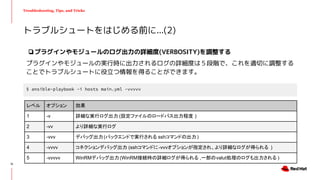
Playbook実行前処理で発生するエラーの多くは、PlaybookやInventoryファイルの書式に関す
るものです。以下のような誤った記述のPlaybookを実行しようとした場合に発生します。
Playbook実行前処理 - (A)
---
- hosts: all
gather_facts: false
tasks:
name: Ping test to managed nodes
- shell: hostname
register: result
name: Ping test to managed nodes
- debug:
var: result.stdout
疲れてくると、この手のエラーが
多くなりがちです。
明日の朝頑張ることにして、もう
ビール飲んで寝ちゃいましょう。
18
19.
Troubleshooting, Tips, andTricks
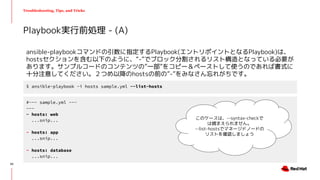
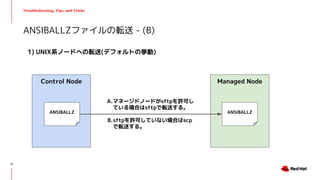
--syntax-checkオプションで、Playbook実行前にチェックして対応しておきましょう。
Playbook実行前処理 - (A)
$ ansible-playbook -i hosts sample00.yml --syntax-check
ERROR! We were unable to read either as JSON nor YAML, these are the errors we got from each:
JSON: Expecting value: line 1 column 1 (char 0)
Syntax Error while loading YAML.
expected <block end>, but found '-'
The error appears to be in '/Users/hsaito/work/testing/ansible/playbook/error/sample00/main.yml':
line 7, column 3, but may
be elsewhere in the file depending on the exact syntax problem.
The offending line appears to be:
name: Ping test to managed nodes
- shell: hostname
^ here
--syntax-checkでPlaybookの
構文エラーを解決したら
ansible-lintによる構文規約の
チェックを行いましょう
19
Troubleshooting, Tips, andTricks
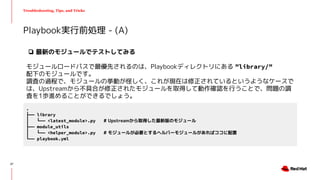
❏モジュールが必要とするライブラリやコマンドがインストールされていることを確認する
Ansibleのモジュールは数多くありますが、利用に際しては必ずドキュメントを読みましょう。
特にRequirementsには、モジュールが動作するのに必要なライブラリやコマンドの情報が書か
れています。
ANSIBALLZファイルの実行処理 - (C)
例: gitモジュール
Requirements
The below requirements are needed on the host that executes this module.
●git>=1.7.1 (the command line tool) これらは、
「ANSIBALLZファイルを実行するノード」
にインストールする必要があります!
45

![Troubleshooting, Tips, and Tricks
たとえば、以下のようなPingモジュールを実行するシンプルなPlaybookの実行例
Ansibleの仕組みと問題が発生するポイント(1)
$ cat playbook/ping_test.yml
---
- name: Preflight playbook
hosts: all
gather_facts: true
tasks:
- name: Ping test
ping:
$ ansible-playbook -i hosts ping_test.yml
PLAY [Preflight playbook] *************************************************************************************************
TASK [Gathering Facts] ****************************************************************************************************
ok: [server00]
TASK [Ping test] **********************************************************************************************************
ok: [server00]
PLAY RECAP ****************************************************************************************************************
server00 : ok=2 changed=0 unreachable=0 failed=0 skipped=0 rescued=0 ignored=0
8](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-8-320.jpg)
![Troubleshooting, Tips, and Tricks
❏ Ansibleの実行ログをログファイルに出力する
デフォルト設定では、Ansibleの実行ログは標準出力に出力されます。まずは、このログをログ
ファイルに出力することから始めましょう。
トラブルシュートをはじめる前に...(1)
#~~~ ansible.cfg ~~~
[defaults]
log_path = /var/log/ansible.log
Ansibleの設定ファイル(ansible.cfg)の、log_pathパラメータにログファイルのパスを設定し
ます。
14](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-14-320.jpg)
![Troubleshooting, Tips, and Tricks
❏ デバッグモードを有効化する
デバッグモードを有効化することで、プラグインやモジュールだけでなくエンジン部分の挙動を
トレースすることができます。
トラブルシュートをはじめる前に...(3)
a)ansible.cfgの設定で有効化する
#~~~ ansible.cfg ~~~
[defaults]
debug = True
b)コマンド実行時に環境変数として一時的に指定する
$ ANSIBLE_DEBUG=True ansible-playbook -i hosts main.yml
$ ANSIBLE_DEBUG=True ansible-playbook -i hosts main.yml -vvvvv
16](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-16-320.jpg)
![Troubleshooting, Tips, and Tricks
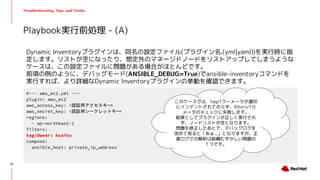
❏ Dynamic Inventoryが正しく動作しない
Ansibleの大きな武器であるDynamic Inventoryですが、AWSやvCenterとの連携に問題があっ
て同期に失敗すると、インベントリ情報が空となったり、想定外のマネージドノードのリストが
作られたり...といった問題が発生します。ansible-inventoryコマンドで確認しましょう。
Playbook実行前処理 - (A)
$ ANSIBLE_DEBUG=True ansible-inventory -i aws_ec2.yml --list
...
{
"_meta": {
"hostvars": {}
},
"all": { # <= AWS上に仮想マシンインスタンスが存在するにもかかわらずallリストが空になっている
"children": [
"ungrouped"
]
}
}
21](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-21-320.jpg)
![Troubleshooting, Tips, and Tricks
❏ Static Inventoryが正しく動作しない
Static Inventoryも、Dynamic Inventoryと同様にプラグイン経由でロードされます。Dynamic
Inventoryと同様の仕組みですから、動作確認も同様にansible-inventoryコマンドで実施できま
す。
Playbook実行前処理 - (A)
$ ANSIBLE_DEBUG=True ansible-inventory -i hosts --list
...
{
"_meta": {
"hostvars": {}
},
"all": { # <= Inventoryファイルにマネージドノードが記述されているにもかかわらずallリストが空になっている
"children": [
"ungrouped"
]
}
}
23](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-23-320.jpg)
![Troubleshooting, Tips, and Tricks
Static Inventoryの問題は、 Inventoryファイルの記述ミスが原因ですから、問題の調査も
Dynamic Inventoryよりも単純で、デバッグログからも比較的見つけやすいため、積極的に
ANSIBLE_DEBUG=Trueでデバッグログを生成して確認してみましょう。
Playbook実行前処理 - (A)
#~~~ hosts ~~~
[server]
server00
server01
server02
server03
[server:vars]
ansible_user: hsaito # INI形式ではなくYAML形式で書かれている
このケースでは、INIファイルであ
るにもかかわらず、group_varsの
指定がYAML形式になっていま
す。あなたは疲れています。
ビールでも飲んで寝ましょう。
24](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-24-320.jpg)
![Troubleshooting, Tips, and Tricks
Playbook実行前処理 - (A)
$ ansible-config dump --only-changed
DEFAULT_LOG_PATH(/home/hsaito/testing/ansible.cfg) = /home/hsaito/testing/logs/ansible.log
HOST_KEY_CHECKING(/home/hsaito/testing/ansible.cfg) = False
INVENTORY_ENABLED(/home/hsaito/testing/ansible.cfg) = ['aws_ec2']
❏ ansible.cfgの設定ミス
Ansibleの振る舞いは、設定ファイル(ansible.cfg)に記述します。
デフォルト値から意図せず変更されていないかを、トラブルシュートの初期段階で確認しておき
ましょう。
ansible-configコマンドに、dumpサブコマンドを--only-changedオプション付きで指定するこ
とで、デフォルト設定から変更した箇所のみを確認することができます。
設定ファイルのパスと優先度(ANSIBLE_CONFIGが最優先)は以下のリンクにある通りです。
複数のパスにansible.cfgが存在する場合は、最も優先度の高いファイルがロードされ、他の
ファイルはロードされないので注意してください。
https://docs.ansible.com/ansible/latest/reference_appendices/config.html#ansible-configuration-settings
25](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-25-320.jpg)
![Troubleshooting, Tips, and Tricks
Playbook実行前処理 - (A)
$ ansible-config dump --only-changed
DEFAULT_LOG_PATH(/home/hsaito/testin/ansible.cfg) = /home/hsaito/testing/logs/ansible.log
HOST_KEY_CHECKING(/home/hsaito/testing/ansible.cfg) = False
INVENTORY_ENABLED(/home/hsaito/testing/ansible.cfg) = ['aws_ec2']
$ ansible-config dump --only-changed
DEFAULT_LOG_PATH(/home/hsaito/testing/ansible.cfg) = /home/hsaito/testing/logs/ansible.log
HOST_KEY_CHECKING(/home/hsaito/testing/ansible.cfg) = False
INVENTORY_ENABLED(/home/hsaito/testing/ansible.cfg) = ['host_list', 'script', 'auto', 'yaml', 'ini',
'toml', 'aws_ec2']
以下のようにデフォルト値に
追記する形に修正する
このケースでは、aws_ec2をInventory
プラグインとして指定しています。この
設定は、デフォルト設定を上書きして
aws_ec2プラグインのみを有効化するた
め、INI形式やYAML形式で記述された
Static Inventoryファイルを正しくロー
ドできなくなります。
26](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-26-320.jpg)
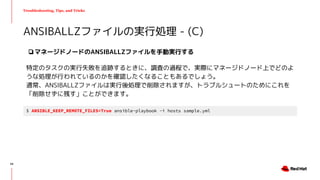
![Troubleshooting, Tips, and Tricks
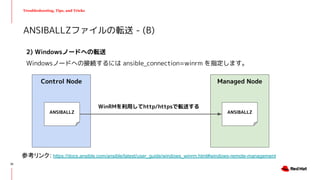
UNIX系のマネージドノードでは、ANSIBALLZファイルの転送にSCP/SFTPを利用します。接続
に失敗するようなケースでは、”-vvvv”オプションを指定してPlaybookを実行することで、バッ
クグラウンドで実行されるssh/scp/sftpコマンドに”-vvv”オプションが指定されます。
UNIX系: ANSIBALLZファイルの転送 - (B)
$ ansible-playbook -i hosts sample01.yml -vvvv
...
TASK [ping]
****************************************************************************************************
*******************************************************************
task path: /home/hsaito/work/testing/codt2020/playbook/sample/sample01.yml:6
<server00> ESTABLISH SSH CONNECTION FOR USER: redhat
<server00> SSH: EXEC sshpass -d11 ssh -vvv -C -o ControlMaster=auto -o ControlPersist=60s -o
StrictHostKeyChecking=no -o 'User="redhat"' -o ConnectTimeout=10 ...
...
<server00> SSH: EXEC sshpass -d11 sftp -o BatchMode=no -b - -vvv -C -o ControlMaster=auto -o
ControlPersist=60s -o StrictHostKeyChecking=no -o 'User="redhat"' -o ConnectTimeout=10 -o
ControlPath=/home/hsaito/.ansible/cp/ac861c7aaa '[server00]'
...
34](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-34-320.jpg)
![Troubleshooting, Tips, and Tricks
マネージドノード側のsshdをデバッグオプション付きで起動することで、接続の失敗に関する
詳細なログを、マネージドホスト側でも確認することができます。
authorized_keysの不適切なパーミッション設定など、マネージドホスト側の設定ミスが原因で
失敗しているようなケースでは有効な調査方法です。
UNIX系: ANSIBALLZファイルの転送 - (B)
[RHEL/CentOS]
#/etc/sysconfig/sshd
#---
OPTIONS="-ddd"
#---
大量のログが出力されるため、
デバッグ時に限定して設定・運用
することをおすすめします。
sshdのリスタートも忘れずに!
35](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-35-320.jpg)
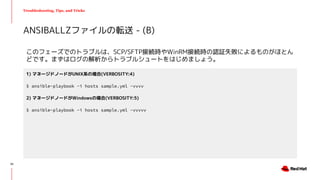
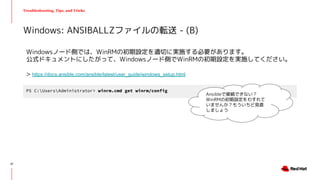
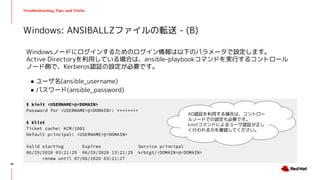
![Troubleshooting, Tips, and Tricks
以下のログは、Windowsノードであるにもかかわらず、ansible_connectionパラメータに
winrmが設定されておらず、デフォルトのSCP/SFTPで接続して失敗しています。
Windows: ANSIBALLZファイルの転送 - (B)
TASK [win_ping]
****************************************************************************************************
task path: /home/hsaito/work/testing/ansible/playbook/sample/sample01.yml:6
<win2019-00> ESTABLISH SSH CONNECTION FOR USER: Administrator
<win2019-00> SSH: ansible.cfg set ssh_args: (-C)(-o)(ControlMaster=auto)(-o)(ControlPersist=60s)
<win2019-00> SSH: ANSIBLE_REMOTE_USER/remote_user/ansible_user/user/-u set:
(-o)(User="Administrator")
<win2019-00> SSH: ANSIBLE_TIMEOUT/timeout set: (-o)(ConnectTimeout=10)
<win2019-00> SSH: PlayContext set ssh_common_args: ()
<win2019-00> SSH: PlayContext set ssh_extra_args: ()
<win2019-00> SSH: found only ControlPersist; added ControlPath:
(-o)(ControlPath=/home/hsaito/.ansible/cp/73ffcfe560)
<win2019-00> SSH: EXEC sshpass -d10 ssh -vvv -C -o ControlMaster=auto -o ControlPersist=60s -o
'User="Administrator"' -o ConnectTimeout=10 -o ControlPath=/home/hsaito/.ansible/cp/73ffcfe560
win2019-00 '/bin/sh -c '"'"'echo ~Administrator && sleep 0'"'"''
...snip...
UNIX系以外のマネージドノード
を相手にするときは、それぞれの
通信要件にあわせて
ansible_connectionを適切に設定
しましょう。
36](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-36-320.jpg)
![Troubleshooting, Tips, and Tricks
❏Playbookの実行ログを確認する
Ansibleはデフォルトの動作ログは、デフォルト設定ではSTDOUTに出力されます。
Ansible Playbookの動作ログファイルを残すというのは問題調査の第一歩です。
ANSIBALLZファイルの実行処理 - (C)
#~~~ ansible.cfg ~~~
[defaults]
log_path = /var/log/ansible.log システム運用では、ターミナルログを常に
取得しておくというのは基本中の基本です
が、コントロールノード側でも取得してお
きましょう。
42](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-42-320.jpg)
![Troubleshooting, Tips, and Tricks
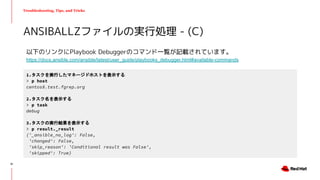
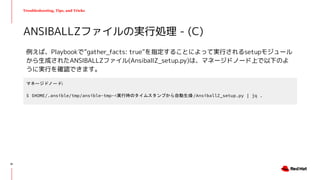
❏Playbookのタスクをステップ実行する(--step)
Playbookのデバッグ時に、各タスクをステップ実行したいようなケースでは--stepオプション
を指定してください。中止(n)、実行(y)、以降のタスクをインタラクションなしで実行(c)の中か
ら選択してタスクを実行します。
ANSIBALLZファイルの実行処理 - (C)
$ ansible-playbook -i hosts sample.yml --step
PLAY [all] ***************************************************
Perform task: TASK: Gathering Facts (N)o/(y)es/(c)ontinue:
後述するPlaybook Debuggerを使ってしま
うので、正直あまり登場機会はありません
が、タスクの実行前にマネージドノード側
で特定の条件を作り出したいよなケースで
は有効です
43](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-43-320.jpg)
![Troubleshooting, Tips, and Tricks
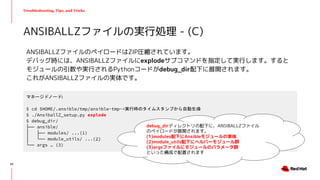
❏Playbookを特定のタスクから実行する(--start-at-task)
ある特定のタスクの調査のために、前段のタスクを飛ばして特定のタスクからPlaybookを実行
したいようなケースで利用します。
ANSIBALLZファイルの実行処理 - (C)
$ ansible-playbook -i hosts sample.yml -l --start-at-task "task B"
PLAY [all]
***********************************************************************************************
TASK [Gathering Facts]
***********************************************************************************************
ok: [centos8.test.fgrep.org]
TASK [task B]
***********************************************************************************************
ok: [centos8.test.fgrep.org]
...
タスクのnameセクションに設定したタ
スク名を指定して、そのタスクから
Playbookを実行します。
Gather Factsはスキップしません。
44](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-44-320.jpg)
![Troubleshooting, Tips, and Tricks
❏ライブラリパスに余計なファイルは配置しない
ansibleのモジュールパスにAnsibleのモジュールと同名のPythonプログラム(例えばsetup.py)
を配置してはいけません。
ANSIBALLZファイルの実行処理 - (C)
$ tree sample04
sample
|-- library
| `-- setup.py
`-- sample.yml
$ ansible-playbook -i hosts sample/sample.yml
...
TASK [Gathering Facts]
*********************************************************************************************
fatal: [centos8.test.fgrep.org]: FAILED! => {"ansible_facts": {}, "changed": false, "failed_modules": {"setup":
{"failed": true, "module_stderr": "Shared connection to centos8.test.fgrep.org closed.rn", "module_stdout":
"/usr/bin/env: ‘python’: No such file or directoryrn", "msg": "MODULE FAILUREnSee stdout/stderr for the
exact error", "rc": 127}}, "msg": "The following modules failed to execute: setupn"}
うっかり *PythonSDK のようなソースコードを、
モジュールパスに展開していしまうと...
Ansibleはそれに含まれるsetup.pyを、自身の
setupモジュールと誤認識して利用しようとします
47](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-47-320.jpg)
![Troubleshooting, Tips, and Tricks
Playbook Debuggerの利用方法は難しくありません。
たとえば前出のPlaybookであれば、skip時にPlaybook Debuggerが起動してコマンド入力待ち
となります。
ANSIBALLZファイルの実行処理 - (C)
ansible-playbook -i hosts -e "foo=FOO,bar=BAR" sample.yml -v
PLAY [all]
*********************************************************************************************
TASK [Gathering Facts]
*********************************************************************************************
ok: [centos8.test.fgrep.org]
TASK [stat]
********************************************************************************************
skipping: [centos8.test.fgrep.org] => {"changed": false, "skip_reason": "Conditional result was
False"}
[centos8.test.fgrep.org] TASK: stat (debug)>
50](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-50-320.jpg)
![Troubleshooting, Tips, and Tricks
以下のリンクにPlaybook Debuggerのコマンド一覧が記載されています。
https://docs.ansible.com/ansible/latest/user_guide/playbooks_debugger.html#available-commands
ANSIBALLZファイルの実行処理 - (C)
4.タスクから参照できる全変数を表示する
> p task_vars
...Taskレベルで利用せきる全ての変数とその値が表示されます...
5.タスクから参照できる特定の変数を表示する
> p task_vars['foo']
'FOO,bar=BAR'
> p task_vars['bar']
***KeyError:KeyError('bar')
この例では、-eオプションの指定を誤って
fooに想定外の値が設定され、barが未設定
の状態となっているのがわかります。
52](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-52-320.jpg)
![Troubleshooting, Tips, and Tricks
以下のリンクにPlaybook Debuggerのコマンド一覧が記載されています。
https://docs.ansible.com/ansible/latest/user_guide/playbooks_debugger.html#available-commands
ANSIBALLZファイルの実行処理 - (C)
6.タスクで実行しているモジュールのパラメータを表示する
> p task.args
{'path': '/etc/hosts'}
7.タスクが参照している特定の変数を再設定する
> task_vars['foo'] = 'FOO'
> task_vars['bar'] = 'BAR'
> p task_vars['foo'],task_vars['bar']
('FOO', 'BAR')
8.再設定した変数やパラメータでタスクを更新する
> u
53](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-53-320.jpg)
![Troubleshooting, Tips, and Tricks
以下のリンクにPlaybook Debuggerのコマンド一覧が記載されています。
https://docs.ansible.com/ansible/latest/user_guide/playbooks_debugger.html#available-commands
ANSIBALLZファイルの実行処理 - (C)
9.タスクで実行しているモジュールの特定のパラメータを表示する
> p task.args['path']
'/etc/hosts'
10.タスクで実行しているモジュールの特定のパラメータの値を変更する(‘u’で更新する変更前の値に戻ってしまうので注意)
> task.args['path'] = '/etc/hostname'
> p task.args['path']
'/etc/hostname''
11.タスクを再実行する
> r
task.args[‘パラメータ名’]で、モジュールの
パラメータを更新後に”更新(u)してはいけま
せん。task_varsの変更と更新(u)は、10.よ
りも前にじ実施しておいてください
54](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-54-320.jpg)
![Troubleshooting, Tips, and Tricks
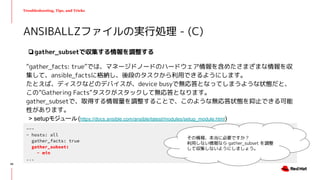
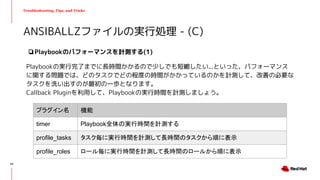
有効にしたいCallback Pluginを、設定ファイル(ansible.cfg)のcallback_whitelistに列挙しま
す。以下のように利用したいプラグイン名を複数指定することがデキます。
ANSIBALLZファイルの実行処理 - (C)
#--- ansible.cfg ---
[defaults]
callback_whitelist = timer, profile_tasks, profile_roles
コールバックプラグインの詳細は、以下のドキュメントを御覧ください
https://docs.ansible.com/ansible/latest/plugins/callback.html
56](https://image.slidesharecdn.com/ansibletroubleshooting101202007-200723235351/85/Ansible-troubleshooting-101_202007-56-320.jpg)























![[DO02] Jenkins PipelineとBlue Oceanによる、フルスクラッチからの継続的デリバリ](https://cdn.slidesharecdn.com/ss_thumbnails/do02-170616023407-thumbnail.jpg?width=640&height=640&fit=bounds)



















![[Red Hat Forum 2017] Ansible Towerの実践!!エンタープライズのInfrastructure as Codeの現在(イマ)](https://cdn.slidesharecdn.com/ss_thumbnails/redhatforumv04-171020081056-thumbnail.jpg?width=640&height=640&fit=bounds)























