The document discusses the application of hyperfunction theory, a generalized function theory based on complex analysis, to numerical integration methods. It elaborates on techniques for numerical integrations and Hadamard's finite parts, providing examples and demonstrating the efficiency of the hyperfunction method, particularly for integrals with end-point singularities. The findings suggest that hyperfunction theory can greatly enhance various scientific computations.


![1. Hyperfunction theory
5 / 24
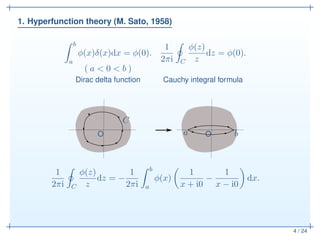
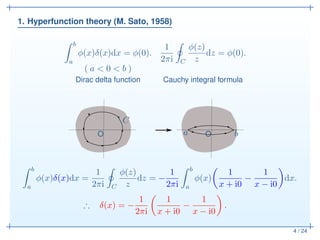
Hyperfunction theory (M. Sato, 1958)✓ ✏
• A generalized function theory based on complex analysis.
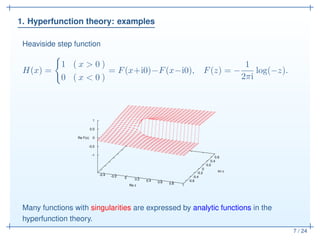
• A hyperfunction f(x) on an interval I is the difference of the boundary
values of an analytic function F(z).
f(x) = [F(z)] ≡ F(x + i0) − F(x − i0).
F(z) : the defining function of the hyperfunction f(x)
analytic in D I,
where D is a complex neighborhood of the interval I.
✒ ✑
D
I
R](https://image.slidesharecdn.com/slide-180820093628/85/An-application-of-the-hyperfunction-theory-to-numerical-integration-8-320.jpg)