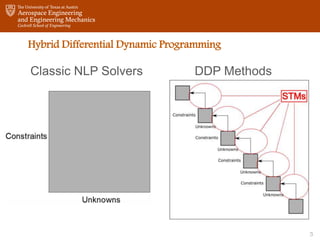
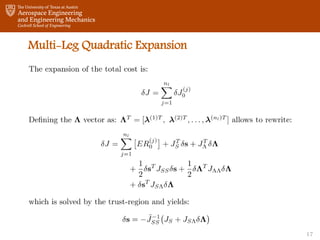
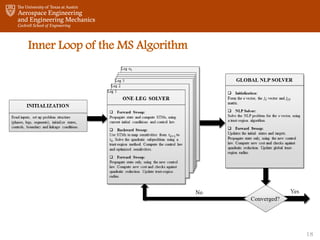
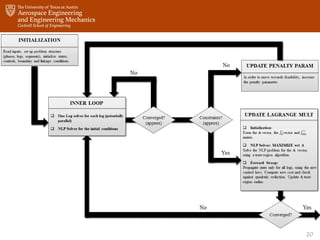
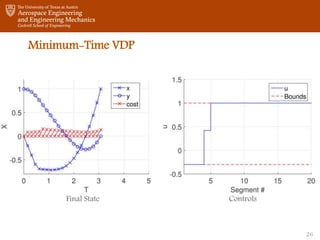
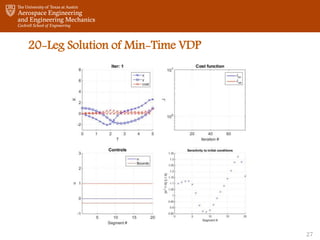
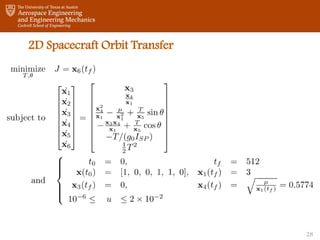
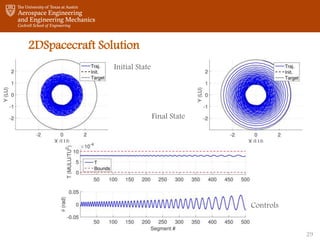
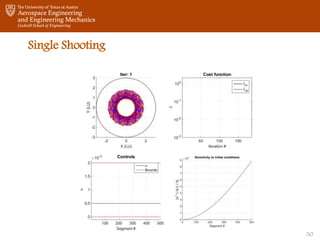
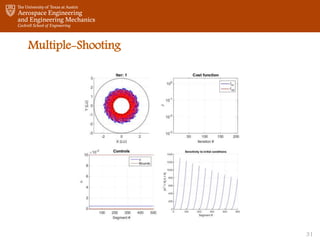
The document presents a multiple-shooting differential dynamic programming algorithm aimed at enhancing spacecraft trajectory optimization through improved robustness and computational efficiency. It details the formulation and solution methods, including augmented Lagrangian techniques, and validates the approach with numerical results from simulations such as the Van der Pol oscillator and 2D spacecraft orbit transfers. Future work will focus on parallel implementation and performance analysis for complex test problems.












































![Ph robust-and-optimal-control-kemin-zhou-john-c-doyle-keith-glover-603s[1]](https://cdn.slidesharecdn.com/ss_thumbnails/ph-robust-and-optimal-control-kemin-zhou-john-c-doyle-keith-glover-603s1-150521042530-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)





















