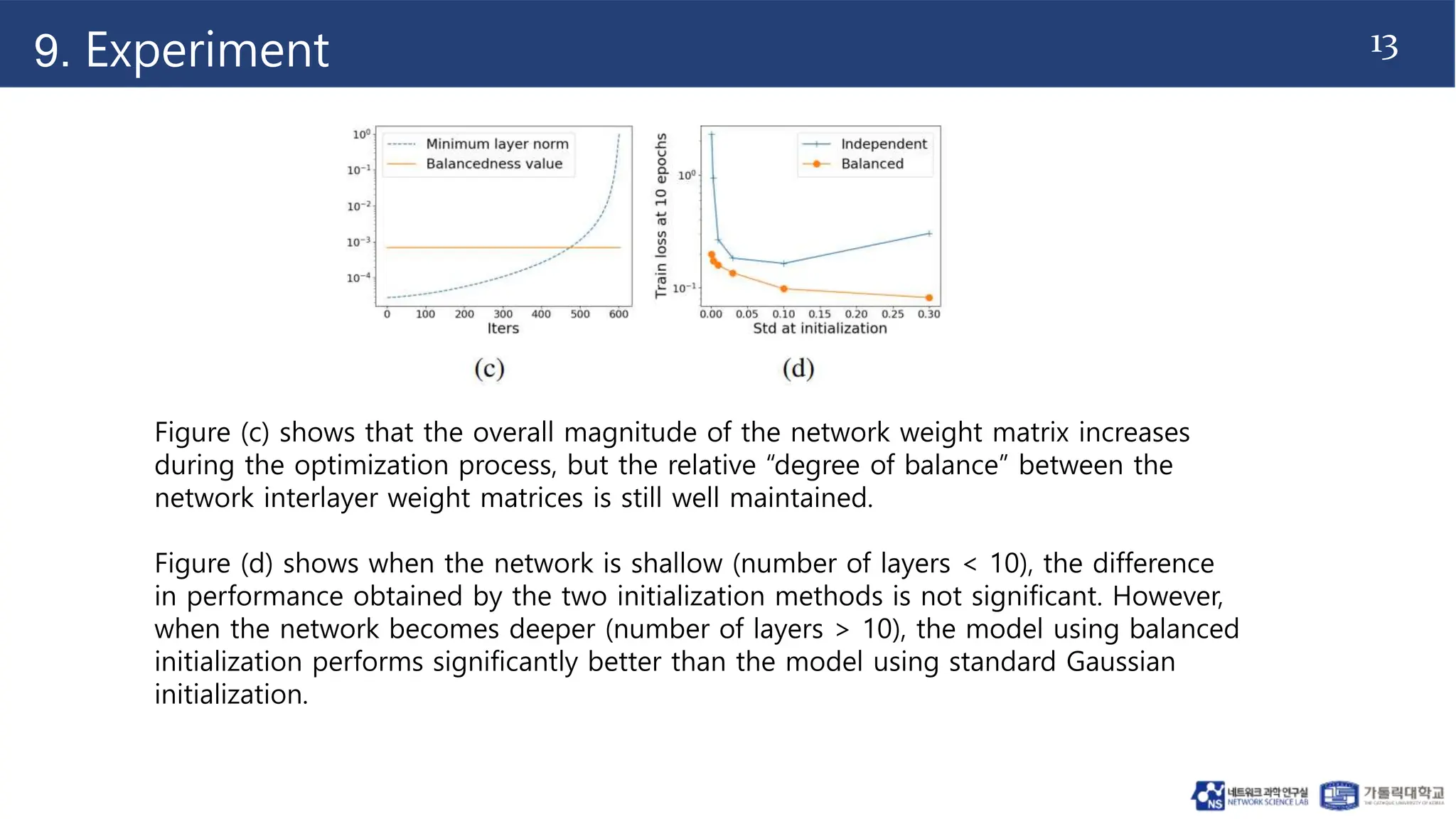
The document discusses the analysis of convergence in gradient descent algorithms applied to deep linear neural networks, emphasizing the importance of weight initialization and conditions that ensure effective convergence to global optimal solutions. It addresses limitations in conventional landscape approaches for deep networks and introduces concepts like approximate balancedness and deficiency margin to facilitate better understanding and optimization. The findings suggest that maintaining balanced weight matrices during initialization enhances convergence speed, especially in deeper networks.
![8
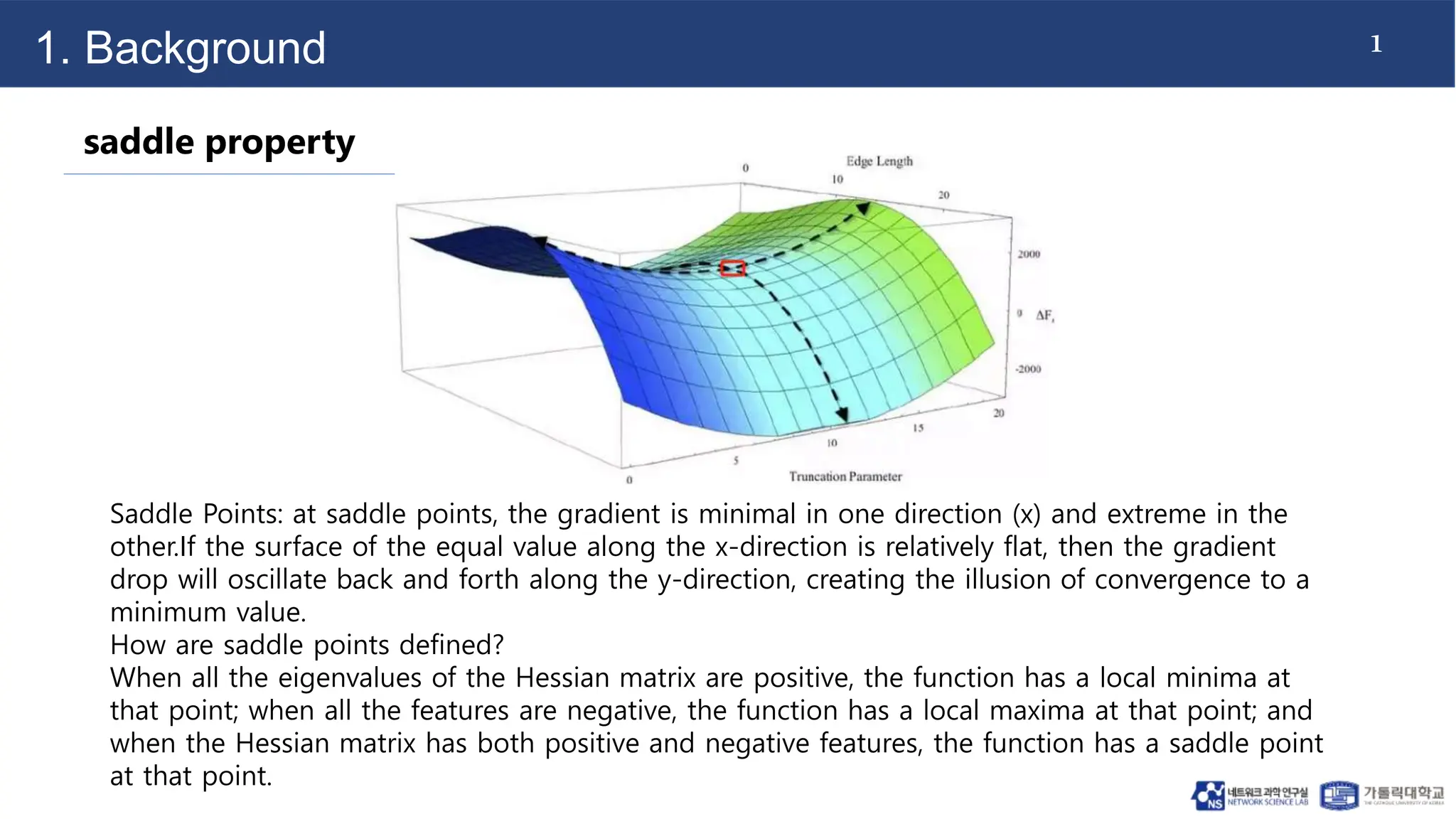
7. Convergence analysis
Definition 1 -- approximate balancedness
approximate balancedness means that the ratio of the singular values of the weight matrix
for each layer cannot be too large.
W1 shape: torch.Size([3, 5])
W2 shape: torch.Size([2, 3])
||[3,2]·[2,3]-[3,5]·[5,3]||F≤ δ
The smaller δ is, the more uniform the distribution of singular values of this weight matrix is,
and the closer to the " balance " state.
W1 W2](https://image.slidesharecdn.com/aconvergenceanalysisofgradient-240605072740-715c9793/75/A-CONVERGENCE-ANALYSIS-OF-GRADIENT_version1-9-2048.jpg)













![[DSC 2016] 系列活動:李宏毅 / 一天搞懂深度學習](https://cdn.slidesharecdn.com/ss_thumbnails/1-160521014039-thumbnail.jpg?width=640&height=640&fit=bounds)













![[NS][Lab_Seminar_251201]High-Precision Mixed Feature Fusion Network Using Hyp...](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar251201mlf-snet-251206120538-22fa2497-thumbnail.jpg?width=640&height=640&fit=bounds)

![251124_HW_LabSeminar[Multimodal-SCM].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251124hwlabseminarmultimodal-scm-251124113300-6fad72e4-thumbnail.jpg?width=640&height=640&fit=bounds)
![251124_Thanh_LabSeminar[Hyper-YOLO].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251124thanhlabseminarhyper-yolo-251124113258-535062b4-thumbnail.jpg?width=640&height=640&fit=bounds)
![251124_Thuy_Labseminar[Vision GNN: An Image is Worth Graph of Nodes].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251124thuylabseminar-251124113257-025487fe-thumbnail.jpg?width=640&height=640&fit=bounds)
![251110_HW_LabSeminar[WHAT TO ALIGN IN MULTIMODAL CONTRASTIVE LEARNING?].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251110hwlabseminarcomm-251110103747-14b1b798-thumbnail.jpg?width=640&height=640&fit=bounds)
![[NS][Lab_Seminar_251110]ControlMLLM.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar251110controlmllm-251110090012-39bbf00d-thumbnail.jpg?width=640&height=640&fit=bounds)

![251103_SH_LabSeminar[Expressiveness of Graph Neural Networks].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251103shlabseminarppgn-251103113317-1094e696-thumbnail.jpg?width=640&height=640&fit=bounds)

![251103_Thuy_Labseminar[Grounded Language-Image Pre-training].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251103thuylabseminar-251103113311-941d56eb-thumbnail.jpg?width=640&height=640&fit=bounds)

![251103_Thanh_LabSeminar[One Last Attention for Your Vision-Language Model].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251103thanhlabseminarrada-251103113308-f66fee0b-thumbnail.jpg?width=640&height=640&fit=bounds)

![[NS][Lab_Seminar_251027]From Pixels to Graphs: Open-Vocabulary Scene Graph Ge...](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar251027pgsg-251027105020-631aebf6-thumbnail.jpg?width=640&height=640&fit=bounds)
![251027_Thuy_Labseminar[Scaling Language-Image Pre-training via Masking].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/251027thuylabseminar-251027105015-a1b9f3e8-thumbnail.jpg?width=640&height=640&fit=bounds)


![[NS][Lab_Seminar_251020]HyperGLM: HyperGraph for Video Scene Graph Generation...](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar251020hyperglm-251020095526-46c0e264-thumbnail.jpg?width=640&height=640&fit=bounds)




















