2 2
2 2
() (x)f
d d w
EI C w q
dx dx
q(x)
Q0
x
( ) (x)
d du
EA q
dx dx
2
2
0
u u
A EA
t x x
2 2 2
2 2 2
0
w w
A EI
t x x
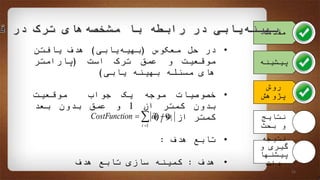
•معادالتحاکمبرهرجزسازه:
معادالت
جابجایی
معادالت
ارتعاش
آزاد
8
9.
1 2 ee+1 N N+1
xa
xb
h1 h2 he hN-1 hN
eth
element
he
1 2
•المانبندیبرایهرجزسازه:
9
10.
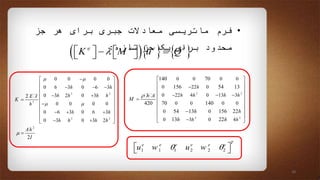
•فرمماتریسیمعادالتجبریبرایهرجز
محدودبراییکجزسازه:
e e e e
K M u Q
2 2
3
2 2
2
0 0 0 0
0 6 3 0 6 3
0 3 2 0 32
0 0 0 0
0 6 3 0 6 3
0 3 0 3 2
2
h h
h h h hE I
h
h h
h h h h
K
Ah
I
2 2
2 2
0 0 0 0
0 22 0
0 22 4 0 13 3
0 0 0 0
0 0
0 3 0 4
140 70
156 54 13
70 140420
54 13 156 22
13 22
h
h h h h
h h
h A
M
h h
h h
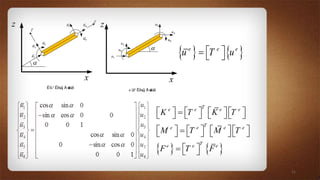
1 1 1 2 2 2
Te e e e e e
u w u w
10
11.
e e e
u T u
Te e e e
Te e e e
Te e e
K T K T
M T M T
F T F
11
#5 بسیاری از خرابی های بزرگ در این سازه ها از یک یا چند ترک کوچک آغار می شود.
با تشخیص به موقع ترک ها و تعویض یا تعمیر اجزای معیوب می توان از خرابی های بزرگ جلوگیری کرد. یکی از اثرات ترکها ایجاد تغییر در مشخصههای دینامیکی و ارتعاشی سیستم می باشد.
روش مستقیم: التراسونیک ، اشعه ایکس ، ماورا بنفش
دقت بالا
هزینه بالا
دسترسی به قطعه
روش غیر مستقیم:
دقت مناسب
هزینه کم
عدم نیاز به دسترسی مسقیم به قطعه
#7 ابتدا به تشریح روش اجزا محدود و سپس الگوریتم کلونی مورچگان پیوسته می پردازیم
#12 روابط بیان شده ، روابط در دستگاه محلی هستند که برای بیان آنها در دستگاه مطلق نیازمند اسفاده از ماریس دوران هسیم.
ماریس دوران
روابط زیر برای انتقال از مختصات محلی به مخصات مطلق اسفاده می شود
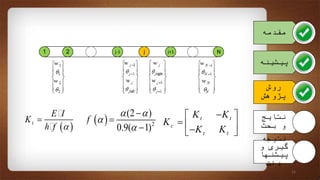
#13 مدل فنر پیچشی برای ترک
در منابع مختلف تابع مختلفی بیان شده است
ماتریس سفتی برای اضافه شدن به معادلات حاکم





















































![6-Karnaugh_Map_QM[1]-arho - ehfeekf0.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/6-karnaughmapqm1-250501064525-4c0e0cbd-thumbnail.jpg?width=640&height=640&fit=bounds)















