Документ описывает устройство управления электроприводами экскаватора, включающее силовую часть и блок управления. Устройство оснащено понижающим трансформатором, несколькими трехфазными мостовыми реверсивными тиристорными преобразователями и фильтро-компенсирующим устройством, что обеспечивает надежное управление с высоким коэффициентом полезного действия. Основные преимущества этого устройства заключаются в улучшении качества управления, повышении коэффициента мощности и надежности работы электроприводов экскаватора.

![BY 7378 U 2011.06.30
2
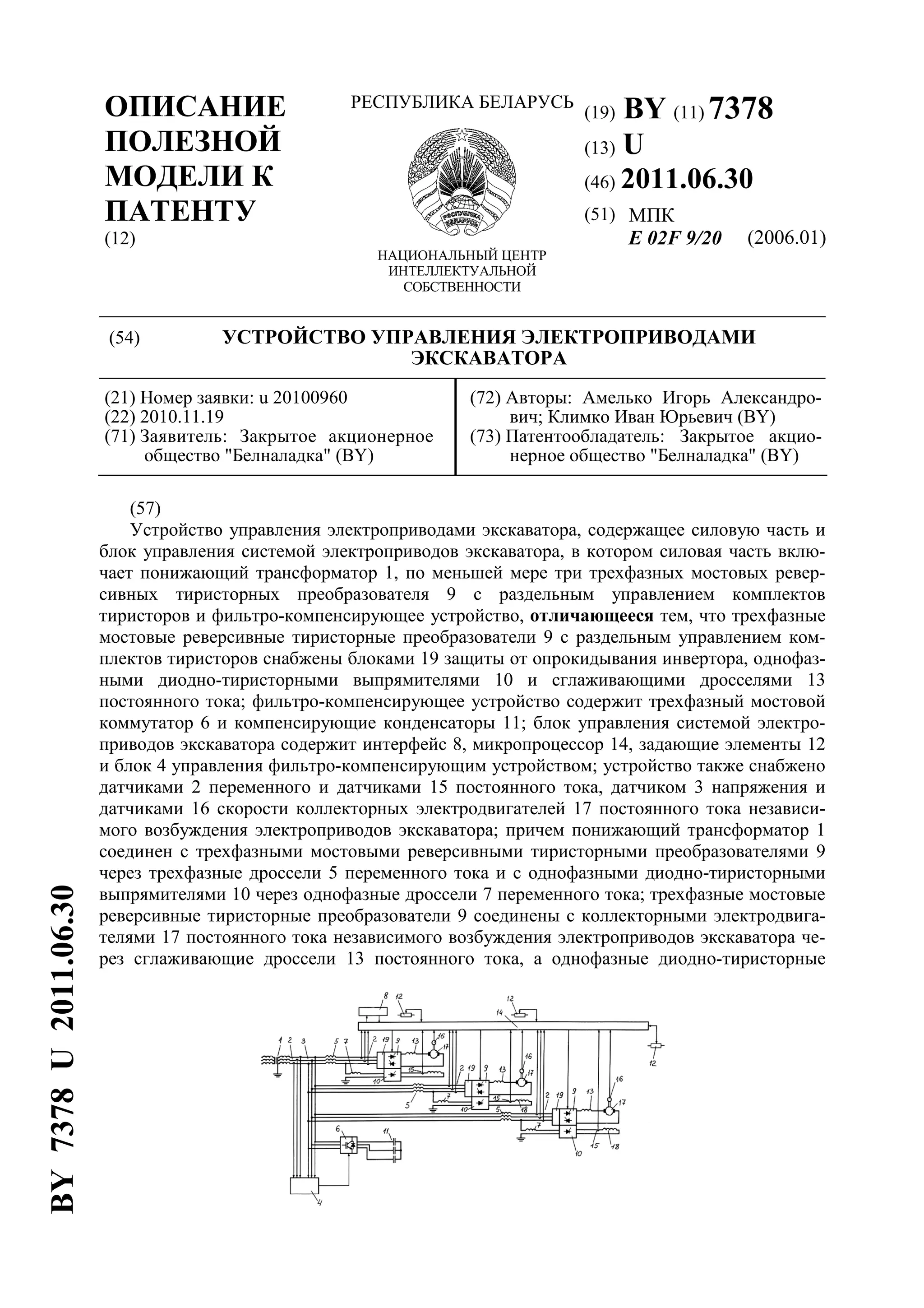
выпрямители 10 подключены к обмоткам возбуждения 18 коллекторных электродвигате-
лей 17 постоянного тока независимого возбуждения электроприводов экскаватора; трех-
фазный мостовой коммутатор 6 подключен к понижающему трансформатору 1
параллельно с однофазными диодно-тиристорными выпрямителями 10 и к блоку 4 управ-
ления фильтро-компенсирующим устройством, который в свою очередь связан с датчика-
ми 2 переменного тока и датчиком 3 напряжения; задающие элементы 12 подключены к
микропроцессору 14, который связан с интерфейсом 8, трехфазными мостовыми ревер-
сивными тиристорными преобразователями 9, с датчиками 2 переменного и датчиками 15
постоянного тока, а также с датчиками 16 скорости коллекторных электродвигателей 17
постоянного тока независимого возбуждения электроприводов экскаватора.
(56)
1. SU 1733577, МПК E 02F 9/20, 1992.
2. RU 2030521, МПК E 02F 9/20, 1995.
3. RU 2193630, МПК 7E 02F 9/20, 2001.
4. Микитченко А.Я., Могучев М.В., Шевченко А.Н., Шоленков А.Н., Греков Э.Л. Раз-
работки ОАО "Рудоавтоматика" в области перспективных систем экскаваторных приво-
дов // Горное оборудование и электромеханика. - 2008. - № 6. - С. 21-28 (прототип).
Устройство относится к управлению горнодобывающей техникой, а именно к управ-
лению электроприводами механизмов одноковшовых карьерных экскаваторов, в частно-
сти главных частотно-регулируемых электроприводов карьерного гусеничного
экскаватора ЭКГ-5А.
Известны устройства управления электроприводами экскаватора, содержащие задаю-
щий блок, подключенный через преобразователь, включающий силовой мост, к электро-
приводу системы Г-Д, датчики тока и напряжения. Задающий блок представляет собой
командоаппарат, построенный по кулачковому принципу. Преобразователь содержит дат-
чик питающего напряжения, регулятор питающего напряжения, датчик напряжения воз-
буждения, силовой мост представляет собой суммирующий магнитный усилитель.
Устройство снабжено датчиками нагрузки, температуры, скорости, регулятором снижения
динамических нагрузок [1, 2].
Известные устройства имеют недостаточно высокие надежность и быстродействие
управления. Система управления является температурозависимой.
Известно устройство управления электроприводами экскаватора, содержащее задаю-
щий блок, преобразователь, включающий датчики тока и напряжения, силовой мост, под-
ключенный к обмотке возбуждения генератора электропривода системы Г-Д [3].
Известное устройство является достаточно сложным и инерционным.
Наиболее близким по технической сущности к заявляемому устройству является
устройство управления электроприводами экскаватора, содержащее силовую часть и блок
управления системой электроприводов экскаватора, в котором силовая часть включает
понижающий трансформатор, трехфазные мостовые реверсивные тиристорные преобра-
зователи с раздельным управлением комплектов тиристоров и фильтро-компенсирующее
устройство [4].
К недостаткам данного устройства можно отнести относительно невысокий коэффи-
циент мощности системы электроприводов в целом из-за наличия высших гармонических
составляющих во входном токе, так как применяемое фильтро-компенсирующее устрой-
ство узконаправленного действия (настроено на компенсацию 5-й и 7-й гармоник), отно-
сительно невысокое качество управления скоростью из-за отсутствия сглаживания тока
якоря двигателя постоянного тока, что в итоге ведет к увеличению неравномерности ча-](https://image.slidesharecdn.com/7378-151011081243-lva1-app6891/85/7378-2-320.jpg)