Документ описывает импульсные регулируемые электроприводы с фазными электродвигателями, разработанные в Москве в 1972 году. Рассматриваются принципы и конструктивные особенности этих электроприводов, включая применение тиристоров как высокоэффективных коммутационных устройств. Книга предназначена для специалистов, занимающихся проектированием и эксплуатацией автоматизированных систем электропривода.

![Это прежде всего Щ'риводы с фазовым и частотным управ
лением.
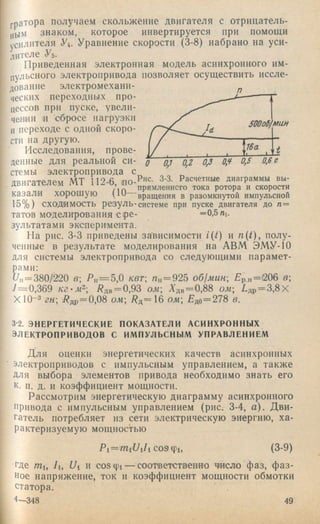
Значительно меньшее (внимание, как это отмечалось
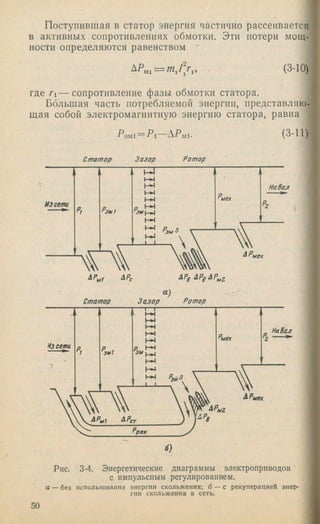
на IV Всесоюзной конференции но автоматизированному
электроприводу [Л. 1], уделяется применению тиристо1ров
как бесконтактных (коммутационных аппаратов для
управления асинхронными двигателя.ми. Систематичес
кого описания и анализа асинхронных электроприводов
с импульсным управлением в отечественной и зарубеж
ной литературе практически нет. Настоящая книга пре
следует цель частично ликвидировать имеющийся пробел,
систематизировав и обобщив накопленный опыт по им
пульсному регулированию асинхронных двигателей с (кон
тактными кольца.ми. В этих электроприводах тиристоры
используются как быстродействующие бесконтактные
коммутационные аппараты с высокими энергетическими
и технико-экономическими показателями. Такое приме
нение тиристоров позволяет создавать электроприводы
переменного тока, отличающиеся конструктивной про
стотой, относительно малой стоимостью и хорошдми ди
намическими свойствами. В настоящей книге не рассмат
риваются физичеокие свойства, принцип действия и
основные технические данные полупроводниковых вен
тилей [Л. 17, 22, 29]. Основное .внимание здесь уделено
принципам построеиия и анализа схем асинхронных им
пульсных электро1Приводов с управляемыми тиристорны
ми коммутаторами, а также исследованию их характери
стик.
Авторы](https://image.slidesharecdn.com/301219-191230205623/85/slide-4-320.jpg)



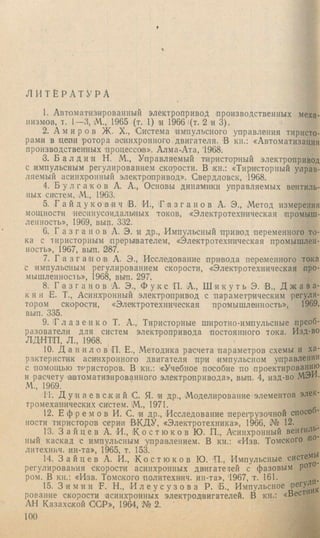
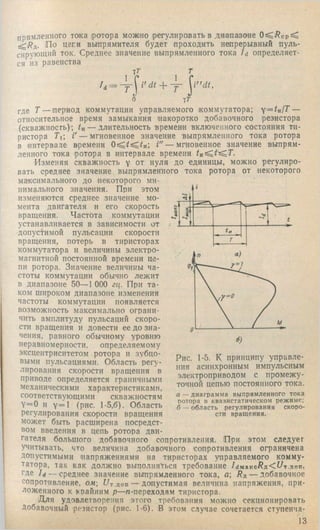
![вращения двигателя. На рис. 1-2,а приведена схема с тиристорным
коммутатором в цепи статора {Л. 15, 40, 41]. Коммутирующим
устройством в схеме являются включенные встречно-параллельно
тиристоры. При этом возможно создание как замкнутой, так и
разомкнутой систем привода. Несмотря на внещнее сходство рас
сматриваемой схемы с релейно-контакторными импульсными схема
ми, качественные различия процессов, происходящих в этих приво
дах, весьма существенны. Это объясняется в первую очередь явле-
Рис. 1-2. Схемы импульсного управления
асинхронным двигателем.
а — с управляемым силовым коммутатором в цепи
статора: б — с управляемым коммутатором в це
пи выпрямленного тока статора; А Д — асинхрон
ный двигатель: ТГ — датчик скорости (тахогене-
ратор); ОС — орган сравнения; УУ — устройство
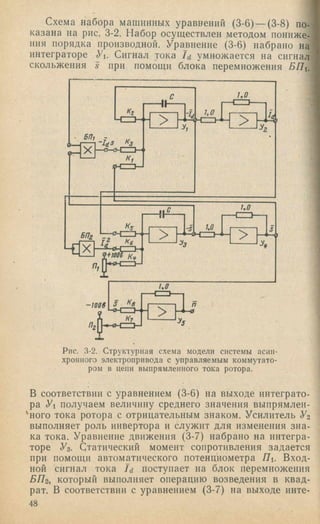
управления тиристорами; t/„ , Op — соответ
ственно напряжения сравнения, обратной связи
по скорости и рассогласования; УТК — силовой
коммутатор; Я — неуправляемый выпрямитель;
Др — сглаживающий дроссель; Яд — добавочное
сопротивление.](https://image.slidesharecdn.com/301219-191230205623/85/slide-9-320.jpg)
![ййём естественной 'коммутации, вследствие которой тиристоры у.прйй^
ляемого коммутатора запираются не непосредственно после снятия
импульсов управляющего напряжения, а лишь при переходе анод
ного тока через нулевое значение. Максимально возможное запазды
вание запирания тиристора равно половине периода питающего
напряжения независимо от величины ко.ммутируемой мощности.
В результате этого дв’игатель может за один период коммутации
работать в трехфазном и двухфазном двигательных режимах, а так
же в режиме лииамического торможения.
Д л я надеж ного открывания тиристоров устройство управления
долж н о выдавать сигналы управления такой величины и длитель
ности, чтобы обеспечить надеж ное включение тиристоров во всем
диапазоне нагрузок и скоростей. Это требование объясняется тем,
что асинхронный двигатель представляет собой активио-.индуктивную
нагрузку, у которой фазовый сдвиг тока и напряжения зависит от
скольжения s. П оэтом у импульсы сигналов управления долж ны
поступать на управляющ ие электроды со смещением на угол ф а зо
вого сдвига или их длительность долж на быть достаточно большой
для надеж ного открывания управляемых вентилей силового ком
мутатора во всем диапазоне скоростей. Импульсы напряж ения управ
ления долж ны быть синхронизированы с питаю щ им . напряжением
и для управления двум я встречно-:параллелы1ьг.М1И тиристорами одной
фазы смещены один относительно другого на 180 эл. град.
В разомкнутых электроприводах подобного -.рода диапазон ре
гулирования скорости невелик. Применяя замкнутые системы регули
рования с обратными связями по •скоро'сти, можно получить диа
пазон регулирования 120 : 1 и более.
Весьма сущ ественны м недостатком электро'пр'И'водов с силовыми
коммутаторами в цепи переменного тока 'статора является то, что
при глубоком регулировании скорости' двигатель работает со зн а
чительной тепловой перегрузкой. Кроме того, имеют место значитель
ные пульсации скорости.
Наряду с управлением но цепи переменного тока статора воз
можно [Л. 33—i35, 41] управление по цепи выпрямленного тока ста
тора (рис. 1-2,6). Здесь концы обмоток статора включены в трех-
фазиый неуправляемый мост с резистором /?д, который шунтирован
управляемым коммутаторо.м УТК на тиристорах Ti и Гг. Варьируя
скважностью замыкания накО|ротко резистора /?д, можно изменять
его среднее значение и тем самым регулировать скорость вращения
двигателя. Механические характеристики асинхронного двигателя
при регулировании скважности подобны механическим характеристи
кам при регулировании .активного сопротивления в цепи статора
при обычной схеме включения.
Б. Тиристорные асинхронные электроприводы с управляемыми
коммутаторами в цепи ротора
Пр.именение .управления по цепи ротора позволяет вынести
з.иачительную часть потерь из дв.игателя, а в ряде случаев цополь-
зовать энергию скольжения. При иопользоваиии схем регулирования
с промежуточной цепью постоянного тока в роторе частота комму
тации не ограничивается частотой переменного тока и может быть
выбрана, ис.ходя из велич'ины допустимой пульсации скорости вра
щения двигателя. Именно эти достоинства схем с управлением по
цепи ротора привели к их преимущественному применению.
10](https://image.slidesharecdn.com/301219-191230205623/85/slide-10-320.jpg)
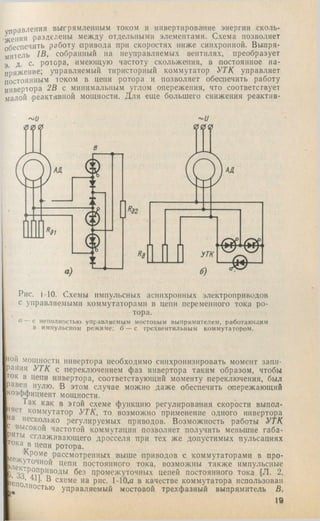
![этой цели используется энергия разряда конденсатора, так как
заряженный конденсатор является источником отрицательного запи
рающего напряжения с очень незначительным внутренним сопротив
лением, что обеспечивает возможность 'прохождения через конденса
тор достаточно большого обратного тока.
Ток через тири'стор Ti будет проходить до тех нор, пока от
управляющего устройства не поступит на управляющий электрод
тиристора Tz отпирающий
Др УТК
Ц
положительный импульс и
тиристор Тг откроется.
В результате ток, проходя
щий через тиристор Ти
практически мгновенно ста
нет равным току нагрузки,
а ток, проходящий через
тиристор 7i, станет рав
ным нулю. Одновременно
в результате начавшегося
п'роцесса разряда комму
тирующего конденсатора С,,-,
к тиристору Т будет при
ложено отрицательное запи
рающее напряжение, кото
рое ускоряет восстановле
ние запирающей способ
ности. Если продолжитель
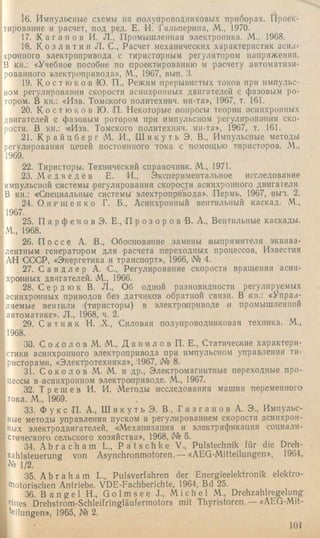
ность разряда конденсатора достаточно велика, то тиристор Т
Рис. 1-4. Схема управления асин
хронным двигателем с силовым ком
мутатором в цепи выпрямленного
тока ротора.
восстановит запирающую способность и ток через нагрузку пре
рвется. Затем конденсатор С« перезарядится через открытый тири
стор Тг- Далее процессы будут повторяться.
В асинхронных импульсных электроприводах тиристорный пре
образователь применяется в качестве быстродействующего бескон
тактного полупроводникового ключа. Схема асинхронного импульс
ного электропривода с промежуточной цепью постоянного тока
является наиболее распространенной. Значительная часть выпол
ненных электроприводов имеют именно такую схему или содержат
ее в качестве составного элемента схемы привода (Л. 7, 13, 14, 30,
33—43, 45, 46]. Поэтому в данной работе этой схеме будет уделено
основное внимание.
Рассмотрим в качестве пр'имера схему на рис. 1-4. В цепь ро
тора двигателя включен добавочный резистор R^. питаемый выпрям
ленным током от трехфазного неуправляемого мостового выпрями
теля В. Пар'аллельно добавочному резистору включен тиристорный
преобразователь постоянного иаиряжения, используемый в качестве
быстродействующего ключа. Для сглаживания пульсаций выпрям
ленного тока в цепь выпрямителя включен дроссель Др. Таким об
разом, в рассматриваемой с.хеме функции преобразователя тока я
управления двигателем разделены. Выпрямитель В преобразует
переменный ток ротора в постоянный, а управление выпрямленным
током осуществляется тиристорным ключом УТК. Величина сопро
тивления цепи ротора зависит ■от состояния ключа; ключ замкнут—
цепь ротора замкнута накоротко, минуя добавочный резистор; ключ
разомкнут — цепь ротора замкнута через добавочный резистор. При
работе управляемого тиристорного коммутатора (УТК) в импульс
ном режиме (рис. 1-5,а) среднее значение сопротивления в цепи вы
12](https://image.slidesharecdn.com/301219-191230205623/85/slide-12-320.jpg)


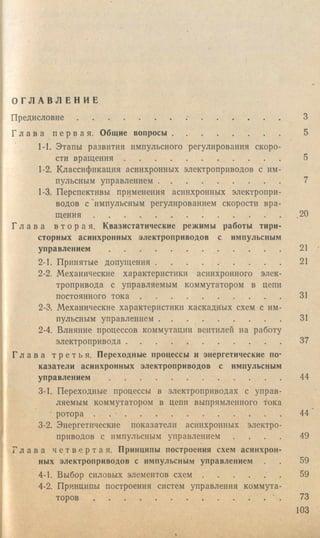
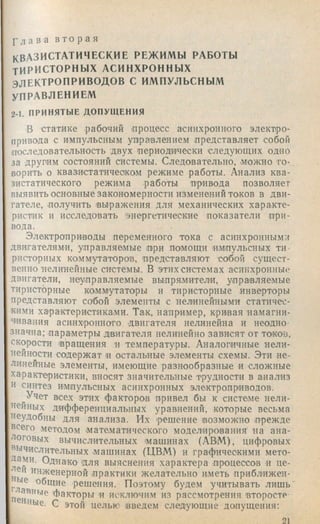
![0 -
и 0 -
ТРН
0,‘f 0,8 1,0
Ф
Рис. 1-8. Схема асинхронного элек
тропривода с импульсным регулиро
ванием в четырех квадрантах (а) и
механические характеристики при
работе регулятора напряжения (б).
ширения диапазона регулирования
скорости вращения и формирования
желательных механических характе
ристик в схему должны быть введе
ны обратные связи.
При необходимости обеспечить
регулирование привода во всех четы
рех квадрантах может быть примене
на схема, приведенная на рис. l-8,j.
В этой схеме импульсное регулирова
ние сочетается с регулированием на
пряжения на зажимах статора асин
хронного двигателя. Планное регули
рование действующего значения на
пряжения осуществляется посредст
вом изменения угла отпирания вен
тилей реверсивного тиристорного ре
гулятора напряжения ТРИ [Л. 8, 18].
16](https://image.slidesharecdn.com/301219-191230205623/85/slide-16-320.jpg)
![П и работе «вперед» включены тиристорные пары 1, 3, 5, при ра
боте «паз^ад» — тиристорные пары 2, 3, 4. В результате работы ТРИ
апряжение на зажимах статора имеет несинусоидальную форму
и ги^зменяется от номинального значения до значения, примерно
вного нулю, при изменении угла отпирания в диапазоне О— 150°.
Так как тиристоры — вентили с неполной управляемостью,
а асинхронный двигатель представляет собой активно-индуктивное
^противление с переменным фазовым углом, то очевидно, что вы
ходное напряжение ТРИ определяется углом регулирования а и
(оТ-э
фазным углом нагрузки 0 = arctg— Механические характеристи
ки асинхронного двигателя при работе ТРИ приведены на
рис. 1-8,6. Граничная характеристика представляет собой характери
стику, соогветствующую' полностью открытым вентилям ТРИ. Оче
видно, она будет отличаться от естественной на величину потерь
в вентилях. Для управления тиристорным регулятором напряжения
необходимо обеспечить надежное отпирание тиристоров в нужные
моменты времени независимо от угла сдвига между током и напря
жением двигателя. При этом должна соблюдаться симметрия углов
регулирования плеч ТРН, так как асимметрия приводит к неравно
мерной загрузке тиристоров, увеличению пульсаций тока и скорости
двигателя, возникновению ударов. Управляя тиристорами регулято
ра напряжения ТРН и силового коммутатора УТК, можно обеспечить
работу двигателя в двигательном режиме в I и III квадрантах и
в тормозных режимах 1(противовключение или динамическое тормо
жение) во II и IV квадрантах. Обычно система управления приво
дом [Л. 35, 40, 41, 46] строится таким образом, что импульсное ре
гулирование при помощи УТК осуществляется только при полностью
открытых вентилях тиристорного регулятора напряжения. Наличие
ТРН позволяет осуществить работу привода в любой точке квад
ранта.
То обстоятельство, что энергия скольжения бесполезно рассеи
вается в сопротивлениях цепи ротора, является важнейшим недо
статком рассмотренных схем. Это снижает к. п. д. и ограничивает
область применения подобных электроприводов. При этом способе
регулирования потери энергии возрастают с расширением диапазо
на регулирования скорости вращения. Этого недостатка лищены
электроприводы, в которых энергия скольжения рекуперируется
в цепь переменного или постоянного тока (Л. 13, 35, 4'1]. Их
схемы показаны на рис. 1-9. Они представляют собой каскадные
схемы с импульсным управлением. Простейшей является схема на
рис. 1-9,0. Здесь энергия скольжения поступает в сеть постоянного
тока. Например, возможно использование [Л. 34, 35] энергии сколь
жения для питания цепей возбуждения синхронных генераторов
в автономном приводе или аккумуляторной батареи. Регулирование
скорости вращения достигается при помощи 'управляемого тири
сторного коммутатора, работающего в режиме щиротпой модуля
ции. Диод Hi предотвращает возможное короткое замыкание источ
ника постоянного тока при открытии вентиля Ti. При постоянной на
грузке на валу двигателя рекуперируемая в сеть энергия максималь
на на нижнем пределе регулирования скорости и уменьшается при
увеличении скорости.
Дальнейшим развитием этой схемы является схема асинхрон
ного вентильного каскада с импульсным регулированием. В асин
хронном вентильном каскаде регулирование скорости вращения осу-
2 -3 4 8 17](https://image.slidesharecdn.com/301219-191230205623/85/slide-17-320.jpg)

![работающий в импульсном режиме. Сонротивленне /?д2 < ^ д 1. Прр
открытых вентилях выпрямительного моста механическая хара.кте.
ристика определяется сопротивлением Rjiz цепи ностояниого тока
При закрытых управляемых вентилях механическая характеристика
определяется сопротивлениями Rjn, включенными в цепь перемен
ного тока ротора. Изменяя скважность включения мостового вы.
прямителя, можно регулировать скорость. Область возможного ре
гулирования скорости расположена между граничными характери
стнками. Схема на рис. 1-10,6 отличается от предыдущей тем, чтс
в ней применены только три вентиля.
.Схемы с коммутаторами в цепях переменного тока имеют не
сколько большую амплитуду пульсаций скорости вращения, что объ
ясняется малыми частотами работающего коммутатора.
1-3. ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ АСИНХРОННЫХ
ЭЛЕКТРОПРИВОДОВ С ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ
СКОРОСТИ ВРАЩЕНИЯ
Системы импульсного регулирования асинхроцных двигателе!
находятся в стадии интенсивного развития и исследования. Свой
ства этих систем полностью еще не раскрыты. Однако можно ука
зать ряд приводов, где импульсное регулирование асинхронных дви
гателей или применяется, или имеет реальные перспективы примене
ния в ближайшее время.
Важной областью применения таких систем является приво.
грузоподъемных машин (кранов, подъемных лебедок и др.). П
диапазону регулирования импульсная система привода вполне удов
летворяет требованиям большинства грузоподъемных машин. Не
сколько сложнее обстоит здесь дело с тормозными режимами npi
опускании грузов. 'В этом случае используется либо динамическо
торможение, либо режим противовключения. В первом случае регу
лирование скорости вращения может быть достигнуто двумя спо
собами; путем импульсного регулирования сопротивления в neit
ротора и путем импульсного включения постоянного тока в статор
ную цепь.
При об.тнх способах регулирование осуществляется с иомощы
тиристорного широтно-импульсного прерывателя. Возможно такж
комбинированное использование обоих способов. При этом можи
получить семейство жестких характеристик, обеспечивающих не
обходимые посадочные скорости при монтажных и других рабг
тах.
Импульсное регулирование в режиме торможения противоаклк
ченнем используется в приводах судовых подъемных лебедок [Л. 4(
и подъемной лебедки экскаватора-крана [Л. 6]. Динамическое гор
.можеиие с импульсным прерывателем имеет преимущества по сравне
нию с этим способом в отношении потерь энергии.
Другой областью применения импульсного регулирования являет
ся привоа вентиляторов. Благоприятные перспективы имеет таки^
импульсное регулирование для привода конвейеров различного нг
значения. В этих машинах обычно требуется незначительное изме
пение скорости. Так, например, в двух- и трехдвигательном приво;
необ.ходимо снижение скорости в отдельных двигателях на 2—3
20](https://image.slidesharecdn.com/301219-191230205623/85/slide-20-320.jpg)
![1. Реальный асинхронный двигатель заменяем идеали-
зи'рованной машиной, у .которой .магнитная це.пь не насы
щена; явления гистерезиса и .потери в стали не упитыва
ются; отсутствуют высшие гармодические и. с.; индуктив
ные со.противления рассеяния не зависят от положения
ротора; токи 'В обмотках изменяются .по гармоническому
закону; воздушный зазор равномерен.
2. Управляемые 'И неуправляемые вентили обладают
идеализированиы.ми вольт-ам.перными характеристиками.
3. Пульсации тока с частотой .скольжения и колеба
ния скорости отсутствуют.
4. Управляемый тиристорный коммутатор представ-’
ляет собой ключ с идеализироваинымн характернсти-;
ками.
5. Угол перекрытия вентилей неуправляемого моста
не превышает 60°.
Принятые .допущения .позволяют, исключив второ
степенные явления, получить достаточно точные и вполне
приемлемые но сложности для инженерных .расчетов ана
литические выражения для токов и скоростной и меха-
.нической характеристик привода.
Рассмотрим две основные схемы асинхронных элект
роприводов с импульсным управлением но цени ротора:
схему с «импульсным» сопротивлеиие.м в цепи выпрям
ленного тока ротора (см. рис. 1-4) и схему асинхронного]
вентильного каскада с имнульсны.м управлением (см;
рис. 1,9-6).
2-2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО
ЭЛЕКТРОПРИВОДА С УПРАВЛЯЕМЫМ КОММУТАТОРОМ
В ЦЕПИ ПОСТОЯННОГО ТОКА
При включении в ротор асинхронного двигателя]
(рис. 2-1,а) неуправляемого .мостового выпрямителя]
в любой момент времени, за исключением периода ком
мутации, ток проходит по дв|у,м фазам ротора. Форма
кривой то1ка ротора зависит от В!еличин индуктивностей
в цени вентилей выпря.мителя. Уже при (3h-5)Lo,
где La — инду.кгивность обмоток асинхронного .двигателя,
кривая тока ротора но форме (Л. 17] приближается
к .кривой, соответствующей Едр = с». При работе управля
емого тиристорного коммутатора ,по цепи выпрямленного
тока проходит постоянпыйпульсирующий ток (рис. 2-1,6 )
В случае полностью открытого у.правляемого 1Ком.мутатО'
22](https://image.slidesharecdn.com/301219-191230205623/85/slide-22-320.jpg)
![После Завершения переходного процесса ток Достигй^
ет значения / 3; в случае закрытого коммутатора ток
уменьшается до значения / 4. Таким образом, в рассмат
риваемой схбхме (режим прерывистых токов невозможен.
Схема замещения, приведенная к цепи выпрямлен
ного тока и соответствующая принятым допущениям, по
казана на рис. 2-1, в. (В этой схеме асинхронный двига
тель заменен, как это обычно принято в теории каскад-
1^9
Рис. 2-1. Управление по цепи выпрямленного тока ротора,
а — схема силовой цепи; б — идеализированная диаграмма выпрямленного
тока; в — схема замещения асинхронного электропривода с импульсным
управлением по цепи ротора.
ных схем [Л. 4, 24—^27], эквивалентным генератором с па
раметрами Еэ, и Lg. На схеме замещения приняты
следующие обозначения:
— э. д. с. эквивалентного генератора:
E s = E d o s . (2-1)
Здесь Edo — среднее значение напряжения на выходе
выпрямительного моста при разом.кнутой цепи .постоян
ного тока и скольжении s = l:
£d, = r 2 £ p ..-?-sin "т
(2-2)
где т — число фаз выпрямителя; при т = б имеем Еао=
^1,35 £рн, где fp.H — э. д. с. на кольцах неподвижного
ротора. >
Л(У=4Д1(7о«4в — суммарное падение напряжения на
скользящем контакте и вентилях выпрямительного моста.
23](https://image.slidesharecdn.com/301219-191230205623/85/slide-23-320.jpg)
![Ra — активное сопротивление эквивалентного генера
тора:
/?з = 1,75/?„+’-^ Х д,5, (2-3)
где Адв5 — сопротивление, учитывающее снижение]
выпрямленного напряжения вследствие явления перекры-
тия вентилей; Адв и /?дв---соответственно (Приведенные
к цепи ротора индуктивное и активное со;противлени5^
фазы асинхронного двигателя при скольжении s = l ; при!
соединении обмоток статора п ротора асинхронного дви
гателя в звезду
Хд. = ^ 4 ^ ; (2-4,
= (2-5)
где ке— коэффициент трансформации:
* , « = . 0 , 9 5 - ^ ; (2-6)
^р.н
A'l и Ri — соответственно индуктивное и активное сопро)
тивления фазы обмотки статора; Х и — соотве-^
ственно приведенные индуктивное и активное сопротив)
ления фазы обмотки ротора; Ui — линейное напряжение
на зажимах статора 'дв1игателя.
La — индуктивность генератора, эквивалентного асин;
хронному двигателю:
(2-7)
где fi — частота питающего напряжения; Адр и 7?др
соответственно индуктивность и сопротивление сглажива;
ющего дросселя; ^д — добавочное сопротивление.
Проанализируем процессы, происходящие в двигатеЛ?
на протяжении одного периода коммутации. В схеме за
мещения управляемый тиристорный коммутатор заменен
ключом К с идеальными характеристиками. При замыка'
НИИ 'ключа э. 'Д. с. эквивалентного генератора включенз
на электрическую цепь с закороченным добавочным сО’
противлением Rji, и ток в цепи 'возрастает; при размыка
нии ключа в цепь вводится добавочное сопротивление^
н ток в цепи уменьшается. В соответствии со схемой*
24](https://image.slidesharecdn.com/301219-191230205623/85/slide-24-320.jpg)

![с учетом введенных обозначений уравнения (2-8) ц
(2-9) могут быть представлены в следующем виде:
= (2-13)
' = (2-14)
р2 dx
Решив полученную систему относительно тока, получим;
»= / , ( 1 - й - » ' ’) + г,(0)е-*''’. = /,(^); 0 < x < y ; (2-15)
i = / , i i - « ' ' ' ’ ''“ ” l +h (0)«-"-'’- " =
= / ,( • ' ) ; (2-16)
где fi(0) и /г(0) — соответственно начальные значения
тока в первом и втором интервалах периода коммутации.
Учитывая, что в анализируемой схеме ток вцепи вы]
прямителя всегда непрерывен (сопротивление цепиопр
деляется допустимыми перенапряжеииями и всегда ко
нечно), начальные значения токов в схеме могут быть
определены из следующих условий:
1^(0) = /2(01 (2-17)
k ( 0 ) = f,(Y).
Рещив полученную систему с учетом равенств (2-15) и
(2-16), получим;
(U) — /мин — V ’
(2-18)
• ! - /. (I ) 4- /. II
— /м ак с— _ g~'9
(2-19)
где ф = Р 1у-1-р 2('1—y).
Амплитуда пульсаций тока в цепи выпрямителя опре:
деляется формулой
А'/ = 7макс—7мин
Подставив сюда значения экстремальных токов
(2-18) н (2-19), получим:](https://image.slidesharecdn.com/301219-191230205623/85/slide-26-320.jpg)
![решив равенства (2-15), (2-16), (2-18), (2-16) и (2-20)
совместно, получим:
(2-21)
Величину среднего знач ения вы прямленного тока м о
жно определ ить по ф о р м у л е
/d = ,(т:) j Д (х) cfx.
о т
Подставив сюда значения мгновенного тока, проходяще
го по цепи выпрямителя, получим:
/d = /,Y + / . ( l - T ) + A / ^ (2-22)
/4
Принимая во внимание, что - ^ . = 4 !-, можем написать:
‘ 3 Рг
/ d = ; т + Р ( 1 - т ) + ( 1 - р ) 4 ^ ^ ^ . ] / „ (2-23)
где
^ (1 _ ^ - Р . 7 )
Коэффициент пульсаций постоянного тока
h - ^маке^ /з(1-^-Р .Т )+ /^^-М [1_^-Р .(1-7)
^мин / 3(1 (> -7 )j
(2-24)
Электромагнитный .момент, развиваемый асинхрон
ным электродвигателем в схеме с «импульсным» сопро
тивлением
М =
'Пренебречь в первом приближении высшими
РМониками тока ротора и пульсациями постоянного
27](https://image.slidesharecdn.com/301219-191230205623/85/slide-27-320.jpg)
![тока, то электромагнитная мощность асинхронного дви
гателя с выпрямителем в цепи ротора с точностью до 5%
определяется равенством [Л. 27]
Следовательно, электромагнитный момент двигателя
М = --------------- L ^ . (2-25)
Соотношения для среднего значения тока и электро
магнитного момента двигателя позволяют построить как
скоростные, так и механические характеристики рассмат-i
риваемой системы электропривода.
Полученные выражения для токов громоздки и
неудобны для практического применения. При малых зна
чениях Pi и Рг (Pi<0,3; Р2< 0,3) можно получить достач
точно точные и простые выражения для токов, если разч
ложить показательные функции в ряд Маклорена и огра
ничиться первыми двумя членами ряда. Тогда получим:
д / ([ __ / (2-26)
пли
- ^ = P , Y ( l - r ) . (2 -2 ^
I'
где Рз = 7’/7'з; 7’з= Т//?д. {
Уравнение для среднего значения выпрямленного токз
после подстановки значений Pi, Рг и Рз можно привести
к виду
Анализируя это равенство, можно сделать вывод, чт|
импульсное 'регулирование среднего значения тока экв!^
валентно введению в цепь добавочного сопротивления
7?д ( 1—у), а величина полного сопротивления Rp зависй)
28](https://image.slidesharecdn.com/301219-191230205623/85/slide-28-320.jpg)
![от скважности у. Используя (2-3) и (2-30), получаем
приближенное уравнение скоростной характеристики
рассматриваемого электропривода
. [^3 + / ? « ( l - Y ) ] / d + Af7
(2-31)
£do — ЗЛГд,/^/;^
где /?з=1у75 /?дв + /?д.р.
Приняв среднее значение выпрямленного тока цепи
ротора двигателя равным нулю, определим величину
скольжения идеального холостого хода асинхронного при
вода с «импульсным» сопротивлением:
HdO
откуда скорость холостого хода
= (2-32)
где tii — скорость вращения .магнитного поля (синхронная
скорость),
В случае применения полупроводниковых вентилей
величиной л и можно пренебречь и считать, что По~Пи
Выражение (2-31) .можно привести к виду
« = /г. 1- + . (2-34)
-do— „ и
Попользовав равенства (2-25) и (2-34), можно по-
<^роить механические хара.ктеристики электропривода.
Достаточно простое выражение для механической харак
теристики можно получить, если пренебречь падением н а
пряжения вследствие явления перекрытия вентилей. Ре
шив равенства (2-25) и (2-30) совместно, получим (с уче-
Т0.Мпринятого допущения):
Л4 '— ^do^d 9,55£до Edo^ ^2 35)
Им доказаны механические характеристики
11^ 7*^1»сной системы электропривода с двигателем МТ
^ '6, добавоч.ным сопротивлением /?д=16 ом и реакто-
с параметрами 1 др= 3,8- 10“ ®гн и /?др= 0,08 ом.
I
29](https://image.slidesharecdn.com/301219-191230205623/85/slide-29-320.jpg)
![Сплошными линиями показаны 'расчетные Механ'й-
ческие характериетики, пунктирным'И — эксперименталь
ные. Из рисунка видно, что механические характеристики]
рассматриваемой системы привода 'подобны механическим]
характеристикам при изме-
Рис. 2-2. Механические харах-
’ теристикн асинхронного элек
тродвигателя с импульсным
управлением по цепи выпрям
ленного тока ротора.
нении активного сопротивле
ния в цепи ротора асин
хронного двигателя. Ж ест
кость характеристик умень
шается при уменьшении
скважности. При скважно
сти y = 0,05 и y = 0,95 искус
ственные механические ха
рактеристики совпадают с
соответствующими гранич
ными.
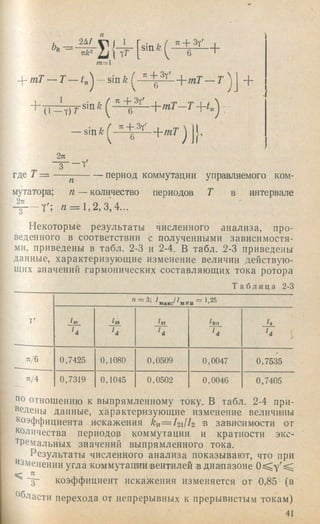
На рис. 2-3 приведены ха
рактеристики, иллюстрирую;-
щие зависимость амплитуды
пульсаций тока ротора от
параметров привода. Как
видно из рис. 2-3, амплитуд
да пульсаций постоянного тока в цепи ротора умень:
шается при уменьшении периода коммутации, увеличе]
НИИ А др сглаживающего реактора и p = pi/p2—
В соответств'ии с принятыми 'допущениями полученные
результаты .могут быть распространены на приводы 4
коммутаторами переменного тока в цепи 'ротора (с.м^
рис. 1-10). В этом случае при расчете скоростных ха,-
й1гя/Id
/ ' я 9,6 ^
/
У
^ман у
V
а ) б)
Рис. 2-3. Зависимости, характеризующие цульсации вы
прямленного тока ротора.
и — расчетная; б — экспериментальная при — ампли
туда пульсаций тока; / — частота коммутации.
30](https://image.slidesharecdn.com/301219-191230205623/85/slide-30-320.jpg)
![рактери'стик добавочные сопрогивления в цепи (Перемен
ного тока ^д.пер заменяют эквивалентным им добавочным
сопротивлением /?д.п в цепи выпрямленного тока. В соот
ветствии с равенством (2-3) ^?д.п=1,75 7?д.пер.
2-3. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ КАСКАДНЫХ СХЕМ
С ИМПУЛЬСНЫМ УПРАВЛЕНИЕМ
Применение каскадных схем с импульсным управле
нием (см. рис. 1-9,6) позволяет [Л. 13, 20, 41] повысить
коэффициент мощности привода, расширить диапазон
регулирования, снизить массу и габариты сглаживающе
го реактора. Особенно целесообразно применение импуль
сного управления в случае наличия неоколыких регули
руемых двигателей. При этом возможно [Л. 41] (примене
ние одного общего инвертора, таи как регулирование
Ь ^3 ’'Йр ‘‘Ip
Рис. 2-4. Схемы асинхронного каскада с импульсным управлением
скоростью вращения.
“ вринцппиа.аьная; б — замещения; в — диаграмма тока в цепи ротора.
скорости двигателя осуществляется при помощи управ-
емого тиристорного коммутатора в депи вынря.млен-
»«го тока poTotpa.
кваз°^^^”^^ допущения, принятые ранее, рассмотрим
Так ^ ^ ^ ^ ^ ‘^^ский режим работы исследуемого .привода.
Дей ^нвертор П (рис. 2-4,а) служит только для це-
энергии, то в схеме замещения .пре-
ователя (рис. 2-4,6) учитываются только неизмен
31](https://image.slidesharecdn.com/301219-191230205623/85/slide-31-320.jpg)

![среднее значение выпрямленного тока в .пограничном
режиме может быть определено в результате совместно
го решения равенств (2-48) — (2-51):
I ’drp = / л -f- /'Л 1- Y) - /, (1 (2-52)
где
о. _ Р. _ '
Р'2 Яг + Ягг
Разложив показательную функцию в полученном вы-
^^ажении в ряд Маклорена и взяв два первых члена .ряда,
получим:
—v)- (2-53)
Решив (2-53) относительно скольжения s, получим
уравнение скоростной характеристики в граничном ре
жиме:
Яd^г (1 Y) -р {Яз -р Яу) 7^drP~Ь А6
Е ^ / '
з х ; ; -----------------------• (2-54)
drp
Таким образом, применяя выражения (2-25), (2-44) и
(2-54), можно построить скоростные и механические
характеристики в режимах прерывистых и непрерывных
токов. В режиме прерывистых токов скоростная харак
теристика представляет собой прямую линию, проходя
щую через точку идеального холостого хода и точку
граничного режима, определяемую в соответствии с
(2-54). В режиме непрерывных токов скоростная харак
теристика представляет собой прямую линию и может
быть построена в соответствии с (2-44).
Если рассматриваемая система электропривода ра
стает с постоянной длительностью включенного состоя-
яя силового коммутатора и переменной частотой ком-
то основным параметром привода является
ыц 19] отношение
«‘ = - ^ = Л - (2-55
R *
Ток случае для определения среднего значения
^ я пограничном режиме получим выражение
/'drp = /зУ+ / ' , ( ! - Т ) - / з - '7 ^ '^ ( 1 - 0 - (2-56)
. 3*
i 35](https://image.slidesharecdn.com/301219-191230205623/85/slide-35-320.jpg)
![Подставив в полученное равенство значения токов
/з и /'4 'ИЗ (2-38), шлучим:
drP
в .
р. + Y (1 _ р - ) _ ( 1 - е - ) ] - P’( l - Y ) ;
(2-57)
где
а ( 1 - т )
^ 1 - е
Р'Т
а
(2-58)
Равенство (2-58) с учетом (2-45) может быть пред
ставлено в следующем виде:
EgpS-A U _ E io s- Ш _ j_
Eias'o — ^ U '^ s 'c
(2-59)
-dH
РД£ — фиктивное скольжение идеального холостого)
хода при Y = О:
Вщ "Ь
s’,
^do
Преобразовав (2-57) с учетом (2-59), получим:
drP
S'c
(2-60)
где /и = Edvi/Ri.
a/sj_
Разложив показатель
ные функции равенства
(2-60) в ряд II ограничив
шись двумя первыми члена
мн ряда, получим прибли
жениое выражение для ско,
ростной характеристики в
граничном режиме:
Д ^ = ( 4 - 1 + т )р '.(2-б1)
о.ее в,? 0JS о,г o,is На рис. 2-6 приведсий
Рис. 2-6. Граничные и скорост- зависимости
Н1ЛГ» V 0Г4 0 1^<Т'ЛГИ/%'1'Т*1Г11 —
иые характеристики асинхрон
ного каскада с импульсным
управлением.
36](https://image.slidesharecdn.com/301219-191230205623/85/slide-36-320.jpg)
![и скоростные характеристики рассматриваемой си
стемы привода с переменной частотой коммутации
[Л. 19]. Как видно из рис. 2-6, слева от пограничных
кривых расположена область прерывистых токов,
справа — непрерывных токов. Скоростные характери
стики двигателя в режиме прерывистых токов подобны
реостатным и имеют малую жесткость.
2-4. ВЛИЯНИЕ ПРОЦЕССОВ КОММУТАЦИИ ВЕНТИЛЕЙ
НА РАБОТУ ЭЛЕКТРОПРИВОДА
При предыдущем анализе предполагалось, что кри
вая тока ротора имеет идеально трапециевидную
форму. Как видно из .рис. 2-7,а, фо-рма действитель
ной кривой тока значительно отличается от идеальной
Т а б л и ц а 2-1
Интервал аргумента Функция /'а
- 3y'
0 < О )^ < -------g - 7 -
я — 3y' п + 3y'
< (О/ < — Л г -Е -
i = 0
п + 3y'
6
5я — 3y'
— 3y' / , . 57t+ 3y'
6 6-------
бтг-Ь 3y'
{at
= Л
Y'
5:: + 3y'
Ш r , = o
'Трапеции. Выполним гармонический анализ кривой
тока ротора, полагая, что коммутация осуществляет
ся по линейному закону. Аппроксимировав действи
тельную кривую отрезками прямых, получим идеали-
зированную диаграмму тока ротора /г, представленную
Яа рис. 2-7,6. Будем рассматривать эту (кривуюсостоящей
яз двух составляющих: тра'пецисв'идпой Кг (рис. 2-7,в) и
Пульсирующей К'г (рис. 2-7,г).
37](https://image.slidesharecdn.com/301219-191230205623/85/slide-37-320.jpg)

![где Y — угол перекрытия вентилей выпрямительного
моста.
Угол перекрытия вентилей практически не зависит
от величины активных сопротивлений в цепи ротора и с
достаточной степенью точности может быть определен
из равенства (Л. 27]
Y' = arccos
К з £р.„ у
(2-63)
Т а б л и ц а 2-2
Интервал аргумента Функция t"a
7Г+ 3y'
О< О)/ < -----
Д/ / 71
' 2 )
,g g " Ь 7
: n / ^+3Y '
^ ~ T - t y 6
+ T — Ш
^ — h(/d— 1) г < (0/<
Д/; / / _____I 2 — f
TT-f 3y'
" + 3y'
g -j- mT (Г ^j,) ^
7Г- f 3y'
А / f
(" 2 = 7’ - / и (
А/ /тх + 3 y'
т Т А -т Т
5тх y'
F a = О
39](https://image.slidesharecdn.com/301219-191230205623/85/slide-39-320.jpg)
![ограничиться первыми четырьмя членамиЕсли
ряда, то в соответствии с (2-62) для трапециевидной со-]
ставляющей тока ротора можно написать:
i m - ( s i „ 4 ■ ' '=
5y^
sin sin 5(ot —
* s i n ^ s i n 7 o ) / + - j k s i n - ^ s i n llco^ (2-64)!72 2
Из (2-64) следует, что трапециевидная состанляю-
щая тока ротора не содержит гармонин, кратных 3, и
четных гармоник.
Пульсирующая составляющая тока симметрична от
носительно оси абсцисс и, следовательно, не содержит
постоянной составляющей и четных гармоник. Аналити
ческие выражения для пульсирующей составляющей
тока ротора для отдельных интервалов времени пред
ставлены в табл. 2-2.
Приведенные в табл. 2-2 соотношения позволяют
представить пульсирующую состанляющую тока в виде
гармонического ряда:
= И 7''к sin { Ш + фй), (2-65)
Л=1
где 7"к и фк — соответственно амплитуда п начальная
фаза k-n гармоники:
фй— arclg
(2-66)
Здесь ah и bk — соответственно косинусный и синус
ный коэффициенты разложения, определяемые [Л. 24] в
соответствии с равенствами:
1
COS k
" + 3y'
тТ — Т ~
Л
т =
— COS k ^
« - f 3y'
X c o s k
6 '
я ' + 3y'
6
1
• ( l - Y ) T ’
^ + 3y' ,
X (2-67)
40](https://image.slidesharecdn.com/301219-191230205623/85/slide-40-320.jpg)
![Т а б л и ца 2-4
*п = /ai/^a при 7 ' = it/6
с'^^мин
1,25 1.5 1,75
0,9812
0,9806
0,9804
0,9803
0,9768
0,9754
0,9752
0.9751
0,9701
0,9686
0,9682
0,9679
ДО 0,998. Коэффициент искажения уменьшается как при
увеличение ’кратности экстремальных значений (выпрям
ленного тока ротора, так и при увеличении относитель
ной частоты коммутации коммутатора (увеличенни п ар а
метра п). При « > 5 коэффициент искажения изменяется
незначительно.
С ростом угла коммутации вентилей величина дейст
вующего значения тока ротора уменьшается. При работе
с нагрузками, близкими к номинальной, угол коммута
ции практически не превышает значения у' = л/З, а
относительная величина действуюшего значения тока
ротора в зависимости от кратности экстремальных зна
чений выпрямленного тока и относительной частоты
коммутации коммутатора изменяется в диапазоне
0,72 ^ h l U < 0,82.
Как показывают исследования [Л. 20], при у' > 0 и
/максДмин < 11,5 первая гармоническая тока ротора от
стает от э. д. с, на угол, примерно равный у'12. При п >
> 3 первая гармоническая тока ротора, действующее
значение тока ротора и коэффициент искажения с до- ]
статочной для целей практики точностью могут быть •
определены из выражений: J
I ___ ' мин 4 / 3
Ч'
Sin
X T
(2-68)
j i^MHH f ^ I I ( 7маке i i Ч! '
^ / з 3 Ti / у /мин / ^ 7
(2-69)
42](https://image.slidesharecdn.com/301219-191230205623/85/slide-42-320.jpg)

![Добавочные аоинхронные моменты возникают при
взаимодействии основной гармонической составляющей
магнитного потока с высшими .гармоническими тока ро
тора.
Так как старшими из числа высших являются 5-я и
7-я гармоники тока ротора, то 'наибольшие добавочные
паразитные моменты обусловлены именно этими выс
шими гармоническими. Магнитные поля от 5-й и 11-й
гармоник.вращаются против поля 1-й гармоники; поле
от 7-й гармоники вращается согласно с полем 1-й гар
моники.
Как показывают исследования [Л. 24, 27], влияние
коммутации вентилей и высших гармонических со
ставляющих токов приводит к снижению критического
момента асинхронного двигателя примерно на 17% по
сравнению с нормальными схемами включения.
Г л а в а т р е т ь я
П Е Р Е Х О Д Н Ы Е П Р О Ц Е С С Ы И Э Н Е Р Г Е Т И Ч Е С К И Е
П О К А З А Т Е Л И А С И Н Х Р О Н Н Ы Х
Э Л Е К Т Р О П Р И В О Д О В С И М П У Л Ь С Н Ы М
У П Р А В Л Е Н И Е М
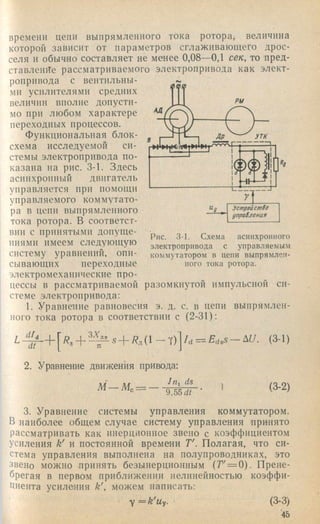
3-1. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРОПРИВОДАХ
С УПРАВЛЯЕМЫМ КОММУТАТОРОМ В ЦЕПИ
ВЫПРЯМЛЕННОГО ТОКА РОТОРА
Изучение физических процессов, происходящих в
асинхронном электроприводе с управляемым коммута
тором в цепи выпрямленного тока ротора (см. рис. 1-4),
позволяет сделать вывод о существенной нелинейности
рассматриваемой системы привода, что вызвано как
нелинейностью асинхронного двигателя, так и нелиней
ностями, вносимыми управляемыми и неуправляемыми
вентилями. Эти особенности рассматриваемого привода,
а также дискретный характер работы управляемого
коммутатора вызывают значительные трудности точно
го математического анализа переходных процессов. Поэ
тому обычно [Л. 6, 24, 27] электроприводы с вентилями в
цепи ротора рассматриваются как электроприводы с вен
тильными усилителями средних значений величин. При-
этом полагают, что управляемый коммутатор представ-'
ляет собой безынерционное звено.
Так как интенсивность протекания переходных про
цессов в вентильной схеме определяется постоянной
44](https://image.slidesharecdn.com/301219-191230205623/85/slide-44-320.jpg)
![Мх — масштабный множитель, в/физ. ед t — действи
тельное время, се/с; ^м— машинное время, се/с; Mt —
масштабный множитель времени.
Тогда переменные модели (машины) будут связаны
с физическими переменными равенством
Х = МхХ,
где X — машинная переменная, в; х — физическая пере
менная, физ, ед.
Прежде всего выбирается масштаб времени. При
этом увеличение масштабного коэффициента, с одной
стороны, приводит к повышению точности решения
[Л. 32], а с другой — к росту производных. Поэтому
масштаб времени выбирают исходя из условия, чтобы
максимальное значение производной не превышало мак
симального значения самой функции. Масштабы осталь
ных переменных также выбирают исходя из условия до
стижения максимальной точности.
Приведем уравнения (3-5) к машинному виду с уче
том того, что в разомкнутой системе в переходномрежи
ме скважность является постоянной величиной.Подста
вив масштабные коэффициенты в исходные уравнения и
заменив физические переменные машинными, после вы
полнения необходимых преобразований получим:
Г a = k iS ^ k 2 id— h l ds (3-6)
s '= .k ^ — (3-7)
n = ki— h s , (3-8)
где
(9 ,5 5 № o . и _ / ' 9 . 5 5 ^ 2 ^
^ n]J ’ " " « - I , / / ,
/ 3AДВ ^ , _ _ 3Ll- fi 44, fj .
М/, Ml, Ms, Mn — соответственно масштабные коэффици
енты тока, времени, скольжения и скорости; Id, s, п —
машинные переменные.
47](https://image.slidesharecdn.com/301219-191230205623/85/slide-47-320.jpg)


![При несинусоидальных токах постоянные потери
в асинхронном двигателе увеличиваются примерно на
5% [Д. 24, 27], что объясняется увеличением потерь
в стали за счет высших гармоник в токах статора и ро
тора. Таким образом, постоянные потерн в схеме с им
пульсным управлением в цепи выпрямленного тока мо
гут быть определены в соответствии с равенством
+ (3-21)
а в каскадной схеме с импульсным регулированием
скорости вращения — из равенства
ДЯпост=(1,05АРа.д.п+ДРот), (3-22)
где АРот — потери холостого хода трансформатора ин
вертора.
Переменные потери в приводе зависят от нагрузки и
определяются из равенства
АРпер = АРм1 + А Р м2+ А Р в + А Р д , (3-23)
где АРди и АРм2— соответственно потери в меди стато
ра н ротора; АРв — потери в вентилях неуправляемого
моста и управляемого коммутатора; А Р д — потери в до
бавочном сопротивлении или в цепи неуправляемого пре
образователя энергии.
Потери в меди асинхронного двигателя могут быть
определены по формуле
ДР„=|ДР„,Н-ДР„2=3/2«д., (3-24)
где Р д в = - ^ +/"2 — активное сопротивление фазы двига-
теля, приведенное к обмотке ротора; h — действующее
значение тока ротора, определяемое в соответствии с ра
венством (2-69).
Полагая, что пульсации выпрямленного тока в цепи
ротора пренебрежимо малы, определяем величину потерь
в добавочном сопротивлении:
ДР, = Рд^/^/х = /" Д (1 -Т ). (3-25)
7
Потери в вентилях преобразователей слагаются из
Потерь в вентилях неуправляемого моста АРн.м.в, потерь
в вентилях коммутатора АРк и потерь в вентилях инвер
тора АРв.и:
АРв = А Рн.м .в+А Рк + АРв.и. (3-26)
53](https://image.slidesharecdn.com/301219-191230205623/85/slide-53-320.jpg)
![Мощность потерь в вентилях преобразователей в наи
более общем случае слагается из: 1) потерь за счет па
дения напряжения в вентилях при протекании прямого
тока; 2) потерь за счет обратного и прямого токов утеч
ки; 3) коммутационных потерь; 4) потерь, обусловлен
ных протеканием токов управления.
Как известно, потери за счет падения напряжения при
протекании прямого тока могут быть определены как
для неуправляемых, так и для управляемых вентилей по
формуле
ДР'=^/о/ср + РРдин, (3-27)
где и о — падение напряжения в вентилях; Рдин — дина
мическое сопротивление вентиля; /ср и / — среднее и дей
ствующее значения тока,_протекающего через вентиль.
Для силового вентиля управляемого коммутатора
в соответствии с принятыми допущениями будем иметь:
а для вентилей неуправляемого выпрямителя
AP'n.„.p= 2Ii(Up + URp„). -(3-29)
Потери за счет прямого и обратного токов утечки оп
ределяются при помощи вольт-амперных характеристик
для областей обратной и прямой проводимостей. Однако
эти потери относительно невелики и ими можно прене
бречь. Точно так же незначительны потери мощности
в цепи управления управляемых вентилей.
Коммутационные потери состоят из потерь при вклю
чении ДРвкл и потерь при выключении ДРвыкл:
ДРп.К= А'РВКЛ+ АРвыкл. (3-30)
Величина потерь при выключении обычно в 3—4 раза
меньше величины потерь при включении. Потери комму
тации при высоких частотах соизмеримы или даже пре
восходят потери за счет установившегося прямого тока,
вследствие чего может потребоваться уменьшение на
грузки на вентиль. В соответствии с [Л. 29] коммутаци
онные потерн могут быть определены из равенства
АРп.к— (3-31)
54](https://image.slidesharecdn.com/301219-191230205623/85/slide-54-320.jpg)
![где /к — частота коммутации; V — анодное напряжение
на вентиле непосредственно перед включением; / — ток
через вентиль сразу после включения; — вре
мя нарастания тока, сек а — коэффициент, зависящий
от тока вентиля и условий коммутации.
Для силового тиристора управляемого коммутатора
с учетом принятых допущений
(3-32)
Приведенная эмпирическая формула имеет прибли
женный характер, поэтому целесообразно определять по
тери на основании осциллограмм анодного тока и напря
жения. Однако при частотах до 200 гц коммутационные
потери не превосходят [Л. 29] 2—5% потерь за счет па
дения напряжения в вентилях при прохождении прямого
тока и, следовательно, можно полагать, что АРп.к~0.
Таким образом, суммарные переменные потери в приво
де с «импульсным» сопротивлением
ДР„ер ^ 3/^/?дз + /^/д (1 - т) + f7o/d(Y + 2). (3-33)
Полезная мощность на валу регулируемого асинхрон
ного двигателя
Р 2«Рм ех=Рэ ( 1- S ) , (3-34)
где Рэ — электромагнитная мощность асинхронного дви
гателя с импульсным регулированием скорости. Д- соот
ветствие с (2-25)
E dJd — I ( 1- S ) . (3-35)
Кривые за'виснмо'сти к. ш. д. в электроприводе с уп
равляемым коммутатором в цепи вы'прямлеиного тока
ротора от скорости пока- pg
заны на рис. 3-5. Кри- ■’
вая 1 получена в резуль
тате расчета по приведен
ным выше формулам, а
кривая 2 — в результате
исследований на экспери
ментальном стенде. При
веденные кривые пока
зывают, что экспери
ментальные и расчетные
Данные достаточно
близки.
0,6
0,4
о,г
7 2
Г
V
м=о,.
.. 1
5М,, п
^1
Рис.
0,2 0,¥ 0,6 0,8 1,0
3-5. Зависимость к. п. д.
двигателя от скорости.
55](https://image.slidesharecdn.com/301219-191230205623/85/slide-55-320.jpg)

![Подставив (3-42) в (3-41), после преобразований получим-
Y'
cos
Х= ^и (3-44)
О,г
На рис. 3-7 показана расчетная кривая зависимости
коэффициента мощности от скорости, построенная для
двигателя МТ112-6. Энергетические показатели электро
привода с асинхронным
двигателем, управляемым
коммутатором в цепи вы
прямленного тока ротора,
несколько отличаются от
соответствующих энергети
ческих показателей при
эквивалентном реостатном
регулировании. Экспери
ментальные кривые энерге
тических показателей при
эквивалентном реостатном
вании показаны [Л. 23]
денных кривых следует, что:
ниях скважности у к. п. д.
привода с импульсным
X
м л г
м „
=0,5
п
0,2 0,4 0,6 0,8 1,0
Рис. 3-7. Зависимость коэффи
циента мощности от CKOpoCTif.
И
на
0,8
0,6
0,4
0,2
О
Х ,7 ]
У =0,68
X ___-
/ y=0,26'
■■0,‘f3
^ = 0,6,8
Ш 4 3
1
Е V
X ’
M
M„
0,2 0,4 0,6 0,8
Рис. 3-8. Зависимости к. п. д. и коэф
фициента мощности от момента дви
гателя.
---------------- к. п. д. при--реостатном регули
ровании; --------- к. п. д. при импульс
ном регулировании, эквивалентном рео
статному; ------------------- коэффициент мощ
ности.
58
им'пульоном регулиро-
рис. 3-8. Из приве-
1) при малых значе-
двигателя в системе
регулированием выше, чем
'В шри'воде с реостат
ным регулированием;
2) при скважности
у > 0 ,5 к. п. д. в элек
троприводе с импульс
ным регулированием
выше, чем в электро
приводе 'С реостат
ным регулированием
при малых нагрузках,
и ниже при больших
нагрузках; 3) коэф-
F фициент мощности х
асинхронного двигате
ля в электроприводе
с импульсным регу
лированием умень
шается при уменьше
нии скважности.](https://image.slidesharecdn.com/301219-191230205623/85/slide-58-320.jpg)
![Г л а в а ч е т в е р т а я
П РИ Н Ц И П Ы ПОСТРОЕНИЯ СХЕМ А СИ Н Х РО Н Н Ы Х
Э Л Е К Т Р О П Р И В О Д О В С ИМ П УЛЬСНЫ М
У П РА ВЛ ЕН И ЕМ
4-1. ВЫБОР СИЛОВЫХ ЭЛЕМЕНТОВ СХЕМ
В схемах импульсного регулирования скорости вра
щения асинхронных двигателей находят применение как
управляемые коммутаторы переменного тока, так и
управляемые коммутаторы постоянного тока. Основные
схемы коммутаторов переменного тока, применяемые
в электроприводах с импульсным управлением, рассмот
рены в гл. 1. Методика выбора тиристоров-коммутаторов
переменного тока приведена в [Л. 22, 29].
Принимая во внимание основное направление разви
тия импульсного регулирования скорости вращения
асинхронных двигателей, более подробно рассмотрим
вопросы построения схем с управляемыми коммутатора
ми в цепи выпрямленного тока (см. рис, 1-4). Основны
ми элементами этих схем являются неуправляемый трех
фазный мостовой выпрямитель и управляемый коммута
тор. Вентили неуправляемого мостового выпрямителя
выбираются по среднему значению тока через вентиль и
максимальному значению обратного напряжения. Для
мостовой схемы среднее значение тока через вентиль
/я =
и
где /d — среднее значение (выпрямленного тока.
Учитывая, что через вентили моста протекают токи
со значительными пульсациями, а также то обстоятель
ство, что при малых частотах роторных токов уменьша
ется допустимая величина тока через вентиль [Л. 24],
следует принять
7а.р —■
где ka— коэффициент запаса, который может быть выб
ран равным 0,75—0,8.
Максимальное значение обратного напряжения на
вентиле
77в.макс ~ 1>045 EdQ.
59](https://image.slidesharecdn.com/301219-191230205623/85/slide-59-320.jpg)
![При конструировании управляемых коммутаторов
постоянного тока, предназначенных для управления асин
хронными двигателями, необходимо учитывать требова
ния, обусловленные работой привода. Из этих требова
ний наиболее важны следующие:
1. Надежное прерывание тока во время пуска непод
вижного асинхронного двигателя и при кратковремен
ных перегрузках в квазистатических режимах, когда
возможно значительное превышение номинальных значе
ний токов. В случае применения коммутаторов 'постоян
ного тока недопустимо большие прерываемые токи приво
дят к значительному уменьшению времени выключения
Аыкл, необходимого ДЛЯ восстановления управляемости
тиристоров, что может привести к срыву коммутации.
2. Возхможность изменения скваж'ности в широких
пределах, необходимых для глубокого регулирования
скорости вращения. Для обеспечения работы на гранич
ных механических характеристиках желательно обеспе
чить диапазон изменения скважности в пределах 0 ,0 5 ^
^ у ^ 0 , 9 5 .
3. Устойчивая работа привода в области малых
скольжений, а также в режиме прерывистых токов (для
каскадных схем с импульсным управлением).
4. Возможность работы с частотой коммутации до
500—800 гц.
Рассмотрим 'конструктивные особенности управляе
мых коммутаторов. Известно, что в качестве управляе
мых коммутаторов постоянного тока применяют тири
сторные широтно-импульсные преобразователи, пред
ставляющие собой тиристорное устройство с узлом
искусственной коммутации. Искусственная коммутация
осуществляется или специальными коммутирующими
конденсаторами, которые запасают энергию, необходи
мую ДЛЯ прерывания тока через силовой тиристор, или
с помощью вспомогательных (транзисторных) ключей.
Тиристорные коммутаторы со вспомогательными транзи
сторными ключами [Л. 9] позволяют управлять малой
мощностью н практического применення для импульсно
го управления асинхронными двигателями не нашли.
Кроме того, односторонняя проводимость вентилей не
управляемого моста (см. рис. 1-4), в цепь которого
включен коммутатор постоянного тока, обуславливает
возможность только одностороннего направления потока
энергии и, следовательно, исключает применение для
60
I](https://image.slidesharecdn.com/301219-191230205623/85/slide-60-320.jpg)
![импульсного управления асинхронными двигателями ре
версивных тиристорных преобразователей.
По указанным причинам для импульсного управле
ния асинхронными двигателями по цепи постоянного то-
'ка находят применение нереверсивные широтно-импульс
ные преобразователи с емкостной (коммутацией. При
выборе схемы нереверсивного Ш1иротно-импульсно|го пре
образователя, предназначенного для применения в ка
честве управляемого коммутатора (УТК), в соответствии
с изложенными выше требованиями исходят из возможно
го диапазона регулирования, скважности замыкания,
перегрузочной способности и к. п. д. преобразователя.
Эти показатели зависят от конструктивных особенностей
пр(юбра3ов атслей.
Различают несколько видов нереверсивных преобра
зователей;
1) с зависимым от нагрузки зарядом (разрядом) ком
мутирующего конденсатора;
2) с чисто резонансным зарядом емкости или допол
нительным зарядом емкости в функции тока нагрузки;
3) с независимым от нагрузки зарядом 'коммутирую
щего конденсатора, который производится от основного
или вспомогательного источника энергии;
4) преобразователи с R — С коммутирующими цепями.
Ниже рассмотрены преобразователи различных ви
дов, которые нашли наиболее широкое применение в ка
честве управляемых коммутаторов постоянного тока для
импульсного регулирования скорости вращения асин
хронных двигателей [Л. 7, 10, 34, 41].
Па рис. 4-1, а показана принципиальная схема сило
вого несимметричного тиристорного триггера с R —С
коммутирующей цепью. Здесь и далее показана только
цепь выпрямленного тока ротора, соответствующая выхо
ду трехфазного неуправляемого моста, а асинхронный
электродвигатель заменен эквивалентным генератором
с параметрами £э, Еэ и /?э, которые могут быть опреде
лены в соответствии с равенствами (2-1), (2-3) и (2-7).
Пусть в начальный момент времени тиристоры Ti и
Тг заперты, а коммутирующий конденсатор Ск не заря
жен. При пуске отпирается тиристор Ti и цепь ротора
асинхронного двигателя оказывается замкнутой через
резистор /?д, а конденсатор Си заряжается с полярно
стью, указанной на рисунке. Дальнейший характер ра
боты схемы зависит от величины коммутирующего со-
61](https://image.slidesharecdn.com/301219-191230205623/85/slide-61-320.jpg)

![сатора должна удовлетворять условию передачи элект
ромагнитной энергии из индуктивности Гэ и емкости С^,
а именно: максимальное значение напряжения на тирис
торе Ti не должно превышать допустимого значения. По
лагая, что вся электромагнитная энергия из индуктив
ных цепей без потерь поступает в конденсатор, полу
чаем:
(4-4)
где Ст.доп — максимально допустимое напряжение, при
кладываемое к крайним р-п переходам тиристора.
Для повышения к. п. д. коммутатора и надежного
запирания тиристора Тг величина коммутирующего со
противления R не должна быть больше (8— 12) R^.
С другой стороны, увеличение сопротивления R ограни
чивает максимально возможную частоту коммутации
[Л. 10], определяемую в соответствии с равенством
/к.макс= — ’ (4-5)
где /к.макс — максимально возможная частота коммута
ции, гц.
Тиристор Ti выбирают по максимальной величине
среднего значения тока и максимальному значению на
пряжения на нем, которое может быть приближенно
определено в соответствии с равенством (4-4). Тиристор
Тг выбирается по максимальному току 'в момент его
включения (ZdMaKc) с учетом возможной кратковремен
ной перегрузки и максимальному напряжению на выходе
выпрямительного моста.
Недостатками коммутатора с R — С коммутирующей
цепью являются большие потери в коммутирующих це
пях и сравнительно небольшая максимально возможная
частота коммутации, которая ограничена временем, не
обходимым для заряда конденсатора до установившего
ся значения натряжения.
На рис. 4-1, б и в показаны схемы управляемых ком
мутаторов с L — С коммутирующими цепями, включае
мыми параллельно основному силовому тиристору Ti, и
зависимым контуром заряда. Принцип действия преобра
зователя, являющегося основой схемы коммутатора, рас
смотрен в гл. 1. На схеме рис. 4-'1,б (преобразователь
включен параллельно добавочному резистору R^. Комму-
64](https://image.slidesharecdn.com/301219-191230205623/85/slide-64-320.jpg)
![тирующий конденсатор Ск, дроссель Lk, диод Лк и вспо
могательный тиристор Гг образуют узел искусственной
коммутации, который совместно с силовым тиристором
Ti представляет собой тиристорный аналог полностью
управляемого вентиля. При открытом тиристоре Ti цепь
ротора замкнута накоротко, минуя добапочиый 'резистор.
При закрытом тиристоре цепь ротора замкнута через
добавочный резистор Лд. Среднее значение сопротивле
ния в цепи ротора за период коммутации
Л с р = Л д ( 1 — у ) -
Изменяя относительное время включенного состояния
тиристора Ti от О до 1, можно изменять добавочное со
противление в цепи ротора от Лд до 0. Область регули
рования скорости вращения тем больше, чем больше
величина добавочного сопротивления. Величина добавоч
ного сопротивления ограничена допустимым напряже
нием на тиристоре Гь
П << б^т.доп
Ад =^-7- .
‘dмакс
В рассматриваемой схеме коммутатора время, отво
димое для восстановления запирающих свойств тиристо
ра, определяется [Л. 21] равенством
г'О.ЭК/д
Таким образом, при заданных параметрах колеба
тельного контура с увеличением среднего значения по
стоянного тока ротора время, отводимое тиристору Ti
для восстановления запирающих свойств, уменьшается,
что может привести при увеличении нагрузки к срыву
коммутации. Чтобы избежать возможного срыва комму
тации, необходимо рассчитывать емкость конденсатора
Ск, исходя из максимально возможного выпрямленного
тока ротора по уравнению
7дмаке^в.маке ^в.макс
0,91f/d 0 ,9 lR f
(4-6)
с другой стороны, необходимо учитывать возможное
увеличение напряжения на конденсаторе, вследствие пе
редачи электромагнитной энергии из индуктивных цепей
двигателя и дросселя Гдр в конденсатор. При этом долж
но выполняться равенство (4-4).
5—438 65](https://image.slidesharecdn.com/301219-191230205623/85/slide-65-320.jpg)
![Величина коммутирующей индуктивности L k с доста
точной степенью точности может быть определена в соот
ветствии с условием
и 2
где Го — период собственных колебаний коммутирующе
го контура, сек.
Следовательно, величина коммутирующей индуктив
ности равна
Lk=
tt
(4-7)
Так как коммутация осуществляется Lk— Ск комму
тирующей цепью, то к. п. д. коммутатора высок: ц = 0,8-±
-ь0,92. Тиристор Ti выбирается по максимальному зна
чению среднего выпрямленного тока ротора Idмакс И до
пустимому напряжению на тиристоре
и Т.ДОП; i^aan/dMaKC^fl. (4-8)
где кзап — коэффициент запаса, выбираемый обычно
в пределах 1,3— 1,8.
Недостатками коммутатора являются: 1) зависимость
устойчивости работы коммутатора от тока нагрузки; 2)
утечка заряда конденсатора через
добавочное сопротивление при дли-
- 0.
тельно открытом тиристоре Ti.
‘‘f С целью поддержания необходимо
го для гашения тиристора Ti на-
пряжения на конденсаторе Ск не
обходимо предусмотреть добавоч
ный источник напряжения Us
(рис. 4-1,б). Резистор Rs ограни
чивает величину потребляемого
тока.
На рис. 4-2 показана схема коммутатора постоянного
тока с автотрансформаторным зарядом емкости [Л. 14,
21, 22]. В этом коммутаторе количество энергии, накоп
ленной в коммутирующем конденсаторе, возрастает при
увеличении тока нагрузки, что позволяет использовать
коммутирующие конденсаторы с меньшей емкостью. При
этом коммутатор устойчиво работает при переменных
Рис. 4-2. Схема ком
мутатора с автотранс
форматорным заря
дом емкости.
нагрузках.
6G](https://image.slidesharecdn.com/301219-191230205623/85/slide-66-320.jpg)
![Рассмотрим процесс работы коммутатора. До начала
работы открыт 'вспомогательный тиристор Гг, и коммути
рующий конденсатор C« заряжается. После отпирания
тиристора Ti ток в цепи нагрузки нарастает, а в колеба
тельном контуре происходит процесс резонансного пере
заряда конденсатора, длящийся в течение половины пе
риода собственных колебаний
контура, после чего тиристор _
блокируется диодом Дк. При ,
ПК.ГТЮиРНПИ ТАГТТПМПГЯТРПКТ4ПГП ти- I г,;:■‘Дквключении вспомогательного ти
ристора Гг протекающий через
тиристор Ti ток практически
мгновенно спадает до нуля, а ■ g ,
ток, 'Протекающим через емкость,
растет. Одновременно к тпристо- Рис. 4-3. Схема комму-
ру Ti прикладывается иапряже- татора с траисформатор-
ние разряда конденсатора, кото- гашением,
рое ускоряет запирание тиристо
ра. Если время разряда достаточно, то тиристор запи
рается. Конденсатор Ск перезаряжается до напряжения,
большего, чем среднее значение выпрямленного напря
жения, получая энергию, запасенную в Li. Величина
индуктивности Li выбирается, исходя из необходимости
ограничения максимума прямого напряжения иа сило
вом тиристоре.
Рассмотренные схемы коммутаторов не позволяют
получить устойчивую работу при наличии области пре
рывистых токов. Этого недостатка лишена схема комму
татора постоянного тока с трансформаторным гашением,
которая показана на рис. 4-3 [Л. 9, 14]. Основной особен
ностью этой схемы в сравнении с рассмотренными ранее
является наличие независимого от силовой цепи конту
ра заряда коммутирующего конденсатора. В связи
с этим коммутационные процессы практически не влияют
на рабочие процессы в силовой цепи. Вследствие этого
коммутатор может устойчиво работать при токах, рав
ных нулю, и минимальной скважности включения сило
вого тиристора Ti—у = 0.
Схема коммутатора состоит из основного Ti и вспо
могательного Гг тиристоров, коммутирующего конденса
тора Ск, коммутирующего трансформатора Тр и элемен
тов зарядного контура Дк и Гц.
Коммутатор работает следующим образом. При по
даче напряжения на зажимы коммутирующей цепи
5* 67](https://image.slidesharecdn.com/301219-191230205623/85/slide-67-320.jpg)
![происходит процесс заряда конденсатора. Конденсатор
заряжается через обмотку трансформатора Wu дроссель
с индуктивностью Lk и блокирующий диод Дк примерно
до удвоенного напряжения источника питания. Для пре
рывания тока через тиристор Li отпирают тиристор Тг.
В результате начинается колебательный процесс разряда
конденсатора, что приводит к возникновению импульса
гашения во вторичной обмотке W2 трансформатора Тр.
Ток вначале уменьшается до нулевого значения, а затем
изменяет свое ^направление, и тиристор Ti гаснет.
Недостатками этой схемы коммутатора являются не
обходимость в дополнительном источнике постоянного
тока, а также наличие гасящего трансформатора, что
приводит к увеличению массы и габаритов коммутатора.
Важной особенностью работы тиристоров в схемах
коммутаторов постоянного тока является наличие емко
стной коммутации. При емкостной коммутации включе
ние и выключение тиристоров могут происходить с боль
шой скоростью изменения анодного тока [Л. 22], что
приводит к недопустимому разрушению структуры ти
ристора. Поэтому величина индуктивности реактора вы
бирается, исходя из условия получения допустимой ско
рости изменения анодного тока, а также из допустимой
пульсации тока.
'При использовании управляемых коммутаторов по
стоянного тока для управления асинхронными двигате
лями средней мощности, где протекают значительные
токи, необходимы как параллельное, так и последова
тельное соединения тиристоров. Параллельное соедине
ние тиристоров связано с необходимостью принимать
специальные меры для равномерного распределения то
ковой нагрузки. Неравномерность распределения токов
между включенными параллельно тиристорами приводит
к недопустимым перегрузкам одних тиристоров и недо
использованию других. Эта неравномерность распределе
ния объясняется главным образом разбросом прямых
вольт-амперных характеристик тиристоров. Таким обра
зом, для обеспечения падежной 'параллельной работы ти
ристоров необходимы либо специальный подбор тиристо
ров, либо принятие мер для принудительного распреде
ления тсука. Принудительное распределение тока между
тиристорами осуществляется или специальными уравни
вающими устройствами (дополнительные активные и
индуктивные сопротивления, ферромагнитные делители),
68](https://image.slidesharecdn.com/301219-191230205623/85/slide-68-320.jpg)
![Рис. 4-4. Параллельно-по
следовательное соединение
тиристоров в плече комму
татора.
включаемыми последовательно с тиристорами, или по
средством воздействия на управляющие цепи тиристо
ров.
Наиболее часто находят применение вследствие высо
кой надежности ферромагнитные делители тока (ФД)
[Л. 29], которые обычно выполняются с тороидальными
магнитоприводами. Сквозь
окно магнитопровода ФД про
пускаются проводники обмоток
силовой цепи, которые подво
дят ток к параллельно вклю
ченным вентилям (рис. 4-4).
Обмотки соединены таким об
разом, чтобы М.Д.С., созданные
токами нагрузки параллель
ных вентилей, были направле
ны встречно. Таким образом,
при равенстве токов в ветвях
результирующий магнитный
поток ФД равен нулю. При
неравномерном распределении
токов в обмотках Ф Д наводятся э. д. с., способствующие
выравниванию нагрузок. Обычно ферромагнитные дели
тели рассчитывают, исходя из условий работы с токами,
не превышающими номинальных значений, вследствие
чего их применение не дает равномерного распределения
токов во всей зоне возможных нагрузок асинхронных
двигателей. Неравномерность распределения токов объ
ясняется возможным пересечением вольт-амперных ха
рактеристик параллельно работающих тиристоров, что
при определенных нагрузках вызывает суммирование
н. с. и насыщение железа ФД. Поэтому расчет ферро
магнитных делителей необходимо выполнять с учетом их
работы при перегрузках, а также производить предвари
тельный подбор тиристоров.
При последовательном соединении тиристоров комму
татора возникает необходимость равномерного распре
деления прямого и обратного напряжений между тирис
торами как в статическом, так и в динамическом режи
мах. Причина неравномерности распределения напря
ж ения— неидентичность вольт-амперных характеристик.
Принудительное распределение напряжения между ти
ристорами в статическом режиме осуществляется с по
мощью резистора /?щ, включенного параллельно вентилю
69](https://image.slidesharecdn.com/301219-191230205623/85/slide-69-320.jpg)
![(рис. 4-4), а в переходном режиме — цепочкой R — С. Со
противление резистора /?ш и параметры R —С-цепочки
могут быть определены [Л. 22] в соответствии с равенст
вами:
nU.п.мин акс.
с = 10/.
и,ОбР
1760
1500
где п — число последовательно включенных тиристоров;
Unauc — максимальное значение прямого напряжения;
UxiMMii — минимальное значение напряжения переключе
ния тиристора, т. е. напряжения, при котором он пере
ключается в проводящем состоянии при отсутствии сиг
нала управления, в /у.т — ток утеч
ки тиристора в прямом направле
нии, а /а — прямой ток, протекаю
щий через вентиль непосредственно
перед коммутацией, а /Уобр — ма
ксимальное допустимое обратное
напряжение, периодически прикла
дываемое к тиристору, в.
Резистор R, включенный после-
цовательно с конденсатором С,
ограничивает величину тока раз
ряда конденсатора при отпирании
тиристора, а также уменьшает
возможноть возникновения высо
кочастотных колебаний. Сопротив-
R выбирается в пределах 5—
1Z50
WOO
0,01 0,05 0,09 сек
Рис. 4-5. Зависимость
/(/) тиристора
ВКДУ-100.
ление резистора
30 ом. в зависимости от величины емкости. Мощности
резисторов /?ш и R должны соответствовать выделяемым
в них потерям энергии. Кроме принудительного распре
деления напряжений в переходном режиме, цепочка
R— С ограничивает величины коммутационных перена
пряжений, а также уменьшает потери в тиристорах при
выключении, рассеивая энергию магнитного поля индук
тивности при протекании обратного тока в резисторе R.
'Перегрузочная способность полупроводниковых вен
тилей мала. На рис. 4-5 приведена экспериментальная
кривая [Л. 12] допустимой перегрузки тиристоров
ВКДУ-100 по току, которая показывает/ что перегрузоч
ная способность тиристоров резко уменьшается с увели
чением длительности приложенной нагрузки. Поэтому
70](https://image.slidesharecdn.com/301219-191230205623/85/slide-70-320.jpg)

![в цепи выпрямленного тока позволяет применять нор
мальные автоматические выключатели, обладающие на
дежностью и стабильностью срабатывания, меньщими
габаритами и массой.
Аппарат защиты в цепи выпрямленного тока целесо
образно [Л. 24] шунтировать активным сопротивлением
такой величины, чтобы ток в цепи ротора при коротком
замыкании был ограничен безопасной величиной, а от
сутствие разрыва цепи ротора предотвращало (при от
ключении аппаратуры защиты) возможность появления
коммутационных перенапряжений.
Защита посредством воздействия на цепь управления
коммутатором применяется для защиты от перегрузок,
а также для формирования специальных механических
характеристик, которые реализуются либо с помощью
токовой отсечки (задержанной обратной связи по току),
либо путем ограничения сигнала задания регулятора
тока. Благодаря сравнительной простоте технической ре
ализации такой защиты она получила широкое распро
странение в электроприводах с тиристорными коммута
торами постоянного и переменного тока [Л. 34, 35, 37, 39,
41]. Защита обычно осуществляется или посредством
снятия управляющих импульсов с силовых тиристоров,
или уменьшением скважности замыкания коммутатора
в зависимости от нагрузки. Применение коммутаторов
постоянного тока, имеющих искусственную коммутацию,
позволяет устранить основной недостаток защиты по це
пи управления — отсутствие ограничивающего воздейст
вия на ток перегрузки в первые мгновения его возник
новения, что обусловлено неполным управлением вен
тилей.
Больщое разнообразие условий работы электроприво
дов исключает однозначный выбор токоной защиты, и
она должна быть выбрана только применительно к ре
альным условиям использования привода. При этом на
иболее полно перегрузочная способность коммутатора
используется в том случае, когда характеристики защит
ного устройства согласованы с режимом работы приво
да, что особенно важно при переменных нагрузках,
характерных для ряда общепромышленных механизмов.
Другими важнейшими требованиями защиты являются
компактность, простота настройки и обслуживания,
а также функциональная согласованность с системой уп
равления приводом.
72](https://image.slidesharecdn.com/301219-191230205623/85/slide-72-320.jpg)
![* Надежность тиристорного коммутатора в значитель
ной степени определяется надежностью тиристоров.
Опыт применения тиристоров в различных системах
электроприводов дает основание считать, что они обла
дают высокой эксплуатационной надежностью. Известно,
например [Л. 22], что интенсивность отказов тиристоров
фирмы Дженерал электрик составляет 0,004% на 1 ООО ч
работы.
В начальный период эксплуатации тиристорных пре
образователей отмечается повышенная интенсивность от
казов, что объясняется выходом из строя тиристоров,
имеющих скрытые дефекты. Поэтому в случае примене
ния тиристорных коммутаторов в особо ответственных
электроприводах следует рекомендовать предваритель
ную тренировку тиристоров с целью выявления вентилей
с нестабильными характеристиками.
4-2. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ УПРАВЛЕНИЯ
КОММУТАТОРОВ
Система управления коммутатора должна быть функ
ционально согласована с системой управления электро
приводом и обеспечивать надежное включение тиристо
ров коммутатора в определенные моменты времени.
Поэтому система управления коммутатора должна удов
летворять ряду требований, определяемых как рабочими
характеристиками тиристоров и дискретным режимом
работы коммутатора, так и специфическими условиями
работы в той или иной системе электропривода. Остано-
вшмся на важнейших из этих требований.
Параметры импульсов управления (амплитуды тока
и напряжения, минимальная длительность, крутизна
фронта) должны быть достаточными для надежного
управления тиристором ©не зависимости от температуры
окружающей орсды и разброса характеристик его. Сле
дует учитывать, что в период начальной эксплуатации
могут происходить изменения характеристик управ
ления тиристоров, вследствие чего система управления
коммутатора должна 'обладать избыточной вы.ходной
мощностью для обеспечения 'надежного включения ти
ристоров в течение всего В'ремени эксплуатации. Как
показывает практика, жоэффициент запаса системы
управления по мощности должен быть не менее 1,5. П р и
нимая во внимание, что тиристорный коммутатор рабо-
,тает в цепи с индуктивностью, ширину импульсов управ
5^-348 ' 73](https://image.slidesharecdn.com/301219-191230205623/85/slide-73-320.jpg)

![пульсов управления основным и вспомотатеЛьным тирис
торами 'коммутатора. Один из импульсов может переме
щаться относительно другого, неподвижного. Изменение
фазового сдвига вызывает изменение скважности замы
кания управляемого коммутатора.
Таким образом, широтно-импульсная система управ
ления должна состоять из сравнивающего устройствзу
широтно-импульсного модулятора и формирователя
импульсов управления. В случае применения замкнутой
системы привода сюда входят также датчики сигналов
обратных связей и промежуточные усилители. Система
управления коммутатором постоянного тока (в зависи
мости от схемы коммутатора) содержит два или более
каналов управления.
Рис. 4 /. Блок-схема широтно-импульсной систе
мы управления.
Схема управления конструируется в зависимости от
требуемых характеристик и осуществляемых режимов.
Существует ряд схемных решений полупроводниковых
широтно-импульсных систем управления [Л. 7, 10, 34, 35,
37]. Не останавливаясь на подробном описании отдель
ных схем, отметим, что в системах фазосмещения ис
пользуются как модуляторы на основе полупроводнико
вых мультивибраторов и блокинг-генераторов с регули
руемой скважностью, так и модуляторы с вертикальным
принципом управления.
На рис. 4-7 показана блок-схема системы управления
с широтно-импульсным модулятором, построенным на
вертикальном принципе. Здесь в системе фазосмещения
используется сравнение опорного линейно изменяющего
ся напряжения с медленно изменяющимся управляющим
напряжением и последующая фиксация прохождения че
рез нуль напряжения рассогласования. Рассматриваемая
система управления выполнена замкнутой с жесткой от-
76](https://image.slidesharecdn.com/301219-191230205623/85/slide-76-320.jpg)
![рицательной обратной связью по скорости и токоогрЛ^
ничивающей связью типа токовой отссчкн. Система уп
равления содержит два канала управления, каждый из
которых управляет своим тиристором. Задающие на'пря
жение 7Уз1 и напряжение, пропорциональное скорости
вращения 1)п, поступают на вход органа сравнения ОСг.
Напряжение рассогласования '7/pi подается на. орган
сравнения ОСи где суммируется с пилообразным напря
жением, поступающим с генератора пилообразного на
пряжения ГПН. Напряжение рассогласования является
управляющим для работающего в ключевом режиме
усилителя КУ. В результате усилитель КУ формирует
прямоугольные импульсы, модулированные по ширине
в соответствии со значением напряжения 7/pi. Получен
ные прямоугольные импульсы напряжения поступают на
логический элемент И, на второй вход которого подается
напряжение с узла токоограничения. Д ля введения токо-
ограничения в устройстве управления использованы полу-
п ров один ковое реле ПР и орган сравнения ОС3. На вход
ОСз поступают задающее напряжение На и напряжение,
пропорциональное выпрямленному току ротора двигателя,
Ui. Когда выпрямленный ток достигает предельного зна
чения, полупроводниковое реле ПР запирает логический
элемент И, блокируя тем самым широтно-импульсный
модулятор. При токах ротора, меньших тока уставки,
логический элемент И открыт. В этом случае модули
рованные по ширине импульсы напряжения с КУ посту
пают на дифференцирующую цепочку Ф32. Продиффе
ренцированный имлульс после усиления и формирования
в выходном усилителе ВУ2 поступает на вход тиристор
ного коммутатора.
Кроме опорного напряжения, генератор ГП Н генери
рует импульсы прямоугольного напряжения, которые
дифференцируются в Ф31 и после усиления и формиро
вания в выходном усилителе ВУ1 поступают на второй
вход тиристорного коммутатора. Таким образом, импуль
сы управления, снимаемые с выхода усилителя ВУ2, мо
гут перемещаться относительно неподвижных импульсов
иа выходе ВУ1. По рассмотренной схеме реализован ряд
электроприводов с импульсным управлением скорости
вращения асинхронных двигателей [Л. 7, 37, 40]. Приме
няемые в схеме полупроводниковые функциональные
элементы (генераторы пилообразного напряжения, триг
геры, мультивибраторы, блокииг-геиерато'ры, ключевые
77](https://image.slidesharecdn.com/301219-191230205623/85/slide-77-320.jpg)
![усилители и t. п.) по схемному решению ИиИем Не of-
личаются от общеизвестных элементов этого тира, ра
счет и особенности работы которых достаточно широко
освещены [Л. 16].
Применение вертикального управления обеспечивает
большую точность и стабильность включения тиристоров,
возможность регулирования скважности замыкания ком
мутаторов в желаемом диапазоне, подачу на управляю
щий электрод тиристора импульсов напряжения с кру
тым передним фронтом. Кроме того, системы с верти
кальным управлением достаточно просты в настройке и
не требуют предварительного подбора входящих в схе
му управления элементов.
В случае необходимости создания электропривода
с высокой статической и динамической точностью в си
стеме управления применяют промежуточные усилители.
Величина требуемого коэффициента усиления промежу
точного усилителя определяется параметрами управляе
мого асинхронного двигателя и коммутатора, диапазо
ном регулирования и желаемой жесткостью механических
характеристик в замкнутой системе. Обычно в элект
роприводах с импульсным управлением асинхронного
двигателя диапазон регулирования не превышает 100:1.
В этом случае коэффициент усиления промежуточного
усилителя имеет величину порядка 10—25. Известно, что
наиболее надежными промежуточными усилителями яв
ляются магнитные усилители МУ. Применяя для пита
ния МУ напряжение повышенной частоты, можно полу
чить практически безынерционные МУ. В этом случае
основными недостатками этих усилителей являются от
носительно большие масса и габариты и малое входное
сопротивление.
Достаточно благоприятным типом промежуточного
усилителя является транзисторный усилитель. Существу
ют промежуточные усилители постоянного тока двух ви
дов: усилители с непосредственной связью и усилители,
вьшолнепные по схеме модулятор— усилитель перемеп-
ного тока — демодулятор. Усилители последнего тиша
весьма стабильны, но более сложны, чем усилители с не
посредственной связью, которые обладают значительным
дрейфом нуля. Принимая во внимание, что требуемый
коэффициент усиления сравнительно мал, следует отдать
предпочтение усилителям с непосредственной связью.
78](https://image.slidesharecdn.com/301219-191230205623/85/slide-78-320.jpg)
![Г л а в а п я т а я
Т И Р И С Т О Р Н Ы Е Э Л Е К Т Р О П Р И В О Д Ы
С И М П У ЛЬСН Ы М Р Е Г У Л И Р О В А Н И Е М СКОРОСТИ
ВР А Щ Е Н И Я А С И Н Х РО Н Н Ы Х Д В И Г А Т Е Л Е Й
5-1. ТИРИСТОРНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД '
С УПРАВЛЯЕМЫМ КОММУТАТОРОМ В ЦЕПИ
ВЫПРЯМЛЕННОГО ТОКА РОТОРА
Схема электропривода с асинхронным двигателем,
который управляется при помощи коммутатора постоян
ного тока с гасящей цепью L — C [Л. 7, 47], представлена
на рис. 5-1. В этой схеме применена широтно-импульс
ная система управления с жесткой отрицательной обрат
ной связью 1П0 скорости (И задержанной обратной связью
по току (отсечка ino току). В системе использован вер-
0 0 0
Kz
ПГ” >0 +
=и
—0 -
. ВУ, ФЗ, УТ ФСУ ГПН
Рис. 5-1. Схема электропривода, управляемого тиристорным комму
татором постоянного тока с L—С гасящей цепью.
тикальный 'принци’п утравления. При этом в узле фазо-
смешения используется принцип сравнендя опорного
пилообразного напряжения с напряжением управления
с 'последующей фиксацией прохождения напряжения
рассогласования через нулевое значение.
Схема состоит из управляемого тиристорного комму
татора, необходимой контактной переключающей аппа-
79](https://image.slidesharecdn.com/301219-191230205623/85/slide-79-320.jpg)
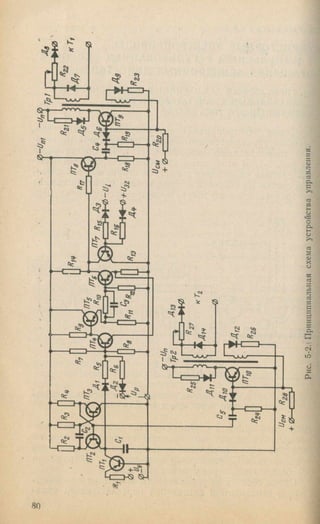
![ляют произвести измерения с достаточной точностью.
Определение токов на основании осциллографических
задисей дозволяет получить большую точность, но тре
бует много времени на обработку полученных при экспе
рименте данных. Более просто, без дополнительной графо
аналитической обработки кривых, с высокой точностью
можно произвести необходимые измерения с помощью
аналоговых вычислительных устройств [Л. 5, 47].
0,1 ио
8>вг
Xио ио Ц
вг
Ну> h
ffy
0,1
0,1
—Hj
X 1 -¥
-lo'^ -
Рис. 5-3. Структурная схема устройства для измерения дей
ствующих значений несинусоидальиых токов.
На рис. 5-3 показана структурная схема измерений,
позволяющая определять с высокой точностью действу
ющее значение несинусоидальных токов, потребляемую
активную мощность, полную мощность и коэффициент
мощности привода. В этой схеме сигнал, пропорциональ
ный мгновенному значению измеряемого несинусоидаль
ного тока, поступает на усилитель 3 и после усиления и
инвертирования усилителями 4— 6 подается на множи
тельное устройство В х Б 4 , которое выполняет операцию
возведения в квадрат. На выходе усилителя 11 получают
квадрат мгновенного значения тока (Р), который посту
пает на вход интегратора 12.
т
На выходе интегратора получают функциюр’^ dt. Накоп-
- . о
т
ление величины (77 за определенное время фиксируется
о
стрелочным регистрирующим прибором аналоговой ЭВМ.
83](https://image.slidesharecdn.com/301219-191230205623/85/slide-83-320.jpg)
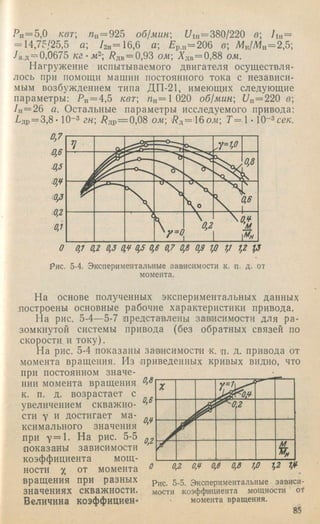

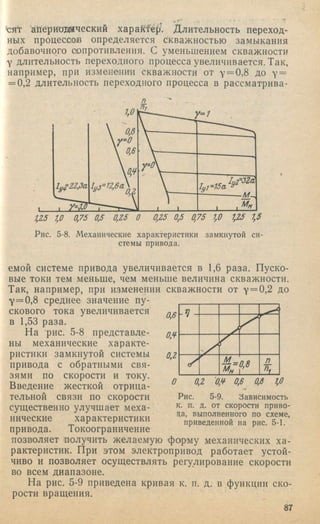
![5-2. АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С УПРАВЛЯЕМЫМ
ТИРИСТОРНЫМ КОММУТАТОРОМ п о с т о я н н о г о ТОКА
с ГАСЯЩЕЙ ЦЕПЬЮ R —C
На рис. 5-10 показана принципиальная схема импульсного управ
ления асин.хрон'ным двигателем с помощью коммутатора постоянного
тока с гасящей цепью R— C (Л. 10, 30]. Как видно из рис. 5-10, в це
пи ipoTopa управляемого асин.хронного двигателя включен неуправ
ляемый трехфазный мостовой выпрямитель В. В цепь выпрямителя
включен тиристорный коммутатор па тиристорах Ti « Т2 с резисто
ром /?д и гасящей цепью R — С. Принцип действия и основные осо-
бен'ности работы коммутатора рассмотрены в гл. 4. При R —
Рис. 5-10, Схема электропривода с тиристорным коммутатором в це
пи выпрямленного тока ротора с гасящей цепью R —С.
=|(8-г-12)i?fl и импульсном управлении тиристорами коммутатора цепь
ротора или замкнута через резистор (включен тиристор Ti), или
разомкнута (выключен тиристор T’l). Изменяя скважность замыкания
тиристора Ti в диапазоне 0 ^ -у < 1 , можно изменять среднее значение
момента на валу двигателя, а следовательно, и скорость вращения
Таким образом, схема привода обеспечивает регулирование скорости
в области, расположенной между осью ординат (цепь ротора разо
мкнута) и реостатной характеристикой с резистором Т?д в цепи вы
прямленного тока.
В рассматриваемой схеме устройство управления построено иа
управляемом мультивибраторе с отключающими диодами, собранном
на транзисторах TITi и ПТ^. Характеристики мультивибратора приве
дены иа рис. 5-11,6 и в. Из приведенных характеристик следует, что
88](https://image.slidesharecdn.com/301219-191230205623/85/slide-88-320.jpg)
![при изменении напряжения управления в диапазоне от —^у.макс До
+ бу.макс скважность импульсов напряжения мультивибратора изме
няется в диапазоне
Для формирования желаемого характера механических характе
ристик в приводе предусмотрена отрицательная обратная связь по
скорости. Для этого в управляющую цепь мультивибратора введены
напряжение смещения '(снимаемое с потенциометра Ris), напряжение
обратной связи ((снимаемое с тахогенератора ТГ) и задающее напря
жение (снимаемое с потенциометра R n ). Пока напряжение обратной
ОМ
й.
-f.n
-0,8-ом О ОМ0,8
б)
0,9
0,8
У
f - 0.6
/ У
V/
^9
Оумат
О 0,20,00,60,810
б)
Рис. 5-11. Характеристики привода, управляемого коммутатором
с гасящей цепью R— C.
а — механические характеристики; б —зависимость частоты мультивибратора
от управляющего напряжения; в — зависимость скважности импульсов напря
жения мультивибратора от управляющего напряжения.
СВЯЗИ «е станет больше задающего напряжения, ток в цепи тахоге
нератора не протекает, 'В рассматриваемой схеме статический момент
сопротивления уравновешивается средним значением вращающего
момента. С достаточной точностью можно принять, что среднее зна
чение вращающего момента (Л. ’10] определяется равенством
я/
Л/ср = - 7 Y.
!>ср
■+
Sop
где Мк и Si; — соответственно критический момент и критическое
скольжение при работе на реостатной характеристике с резистором
^д; Sep — среднее значение скольжения за период коммутации.
На рис. 5-11,а представлены механические характеристики при
вода по рассматриваемой схеме (Л. 30] для двигателя АК52-4. Пара
метры коммутатора; /к=75 гц R a = 2 ом; €« = 78 мкф; R = 2 b ом.
5-3. ТИРИСТОРНЫЕ АСИНХРОННЫЕ ЭЛЕКТРОПРИВОДЫ
С КОММУТАТОРАМИ ПЕРЕМЕННОГО ТОКА
а) Привод с коммутатором в цепи ротора
Для привода механизма подъема универсального ди-
зель-электрического экскаватора-крана был разработан
и осуществлен асинхронный электропривод с управляе
мым коммутатором переменного тока в цепи ротора дви
гателя [Л, 6, 33, 47]. Принципиальная схема электропри-
7 —348 89](https://image.slidesharecdn.com/301219-191230205623/85/slide-89-320.jpg)


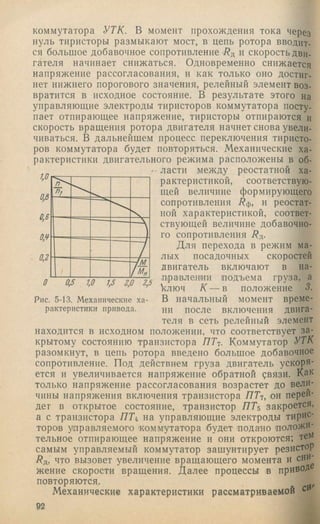
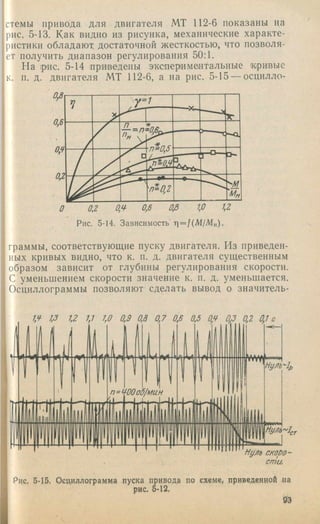

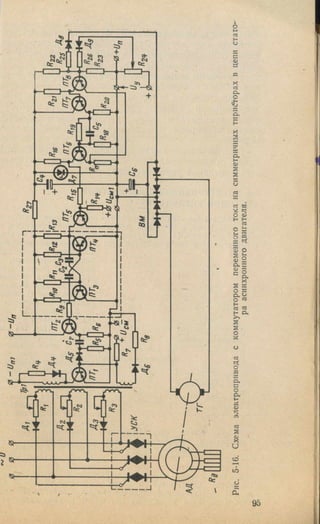
![ся. с целью предотвращения запаздывания открывания
вентилей параметры мультивибратора выбираются тд
кими, чтобы он генерировал импульсы с частотой, в lo~J
15 раз большей, чем частота питающей сети.
Основным недостатком релейного принципа управле
ния является наличие автоколебаний скорости, относи
тельная величина которых достигает особенно больших
значений при глубоком регулировании. Это требует при-
нятия специальных мер, например, введения обратной
связи по первой или второй производной от сигнала
ошибки.
Механические характеристики рассматриваемой си
стемы привода аналогичны механическим характеристи
кам описанной ранее системы.
5-4. ЭЛЕКТРОПРИВОД С ДИСКРЕТНОЙ
СИСТЕМОЙ УПРАВЛЕНИЯ
Применяемые системы управления вентильными преобразовате
лями всех типов, в том числе управляемыми коммутаторами, имеют
важные органические недостатки: сравнительно низкую надежность
и недостаточное быстродействие. Эти недостатки объясняются как
наличием в схеме привода
системы управления, рабо-
АД
УИЧ—I
Lh
Др осч - гзч
пI 1 /
11(-•-
1
ВИУП
УТК
тающей в режиме передачи
сигналов, так и наличием
сглаживающих фильтров.
Применение систем уп
равления, построенных толь
ко на дискретных элемен
тах, позволяет устранить
эти недостатки, так как ди
скретные устройства рабо
тают в менее напряженных
тепловых режимах, чем не
прерывные, обладают высо
кой помехоустойчивостью и
позволяют сравнительно
просто рещать вопросы Ре
зервирования узлов схемы
управления. Некоторое уве
личение количества элемен
тов в дискретной схеме
управления может быть
компенсировано примене
нием интегральных схем-
Рис. 5-17. Схема электропривода
с дискретным устройством управ
ления. г _
Поэтому представляют ин
терес схемы электропр'^
водов с импульсным регулированием скорости ©ращения асинхронны^
двигателей с дискретными системами управления (Л. 28, 42, 431. ^
рис. 5-17 представлена функциональная схема электропривода с а,
скрегной системой управления [Л. 43]. В рассматриваемой схе-
96](https://image.slidesharecdn.com/301219-191230205623/85/slide-96-320.jpg)