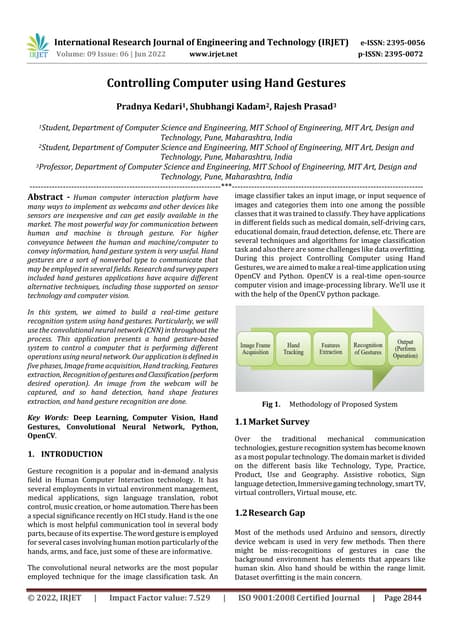
The document discusses the development of a hand gesture control robotic arm that utilizes image processing technology for intuitive user interaction. It covers the background, design components, algorithm implementation, and performance demonstration, highlighting the challenges and future directions for improving gesture recognition. Potential applications include advanced prosthetics and enhanced human-robot interaction in various settings.



![Purple_&__white_business_profile_presentation_(2)[1][1][1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/purplewhitebusinessprofilepresentation2111-250801082431-164b0dfc-thumbnail.jpg?width=640&height=640&fit=bounds)