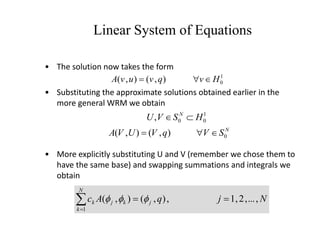
Weighted residual methods are used to solve differential equations numerically. They involve approximating the solution over the domain as a linear combination of basis functions. This creates a residual error that is minimized in an integral sense by choosing the coefficients to satisfy orthogonal conditions. Common weighted residual methods include Galerkin's method and point collocation. The weak form is preferred over the strong form as it requires less continuity from the test and trial functions.

![Weighted Integral Forms
L
L
x
Q
dx
du
a
u
u
x
x
q
dx
du
x
a
dx
d
u
L
)
0
(
1
0
,
0
)
(
)
)
(
(
]
[
0
The class of differential equations containing also the one
dimensional bar described above can be described as follows
Here a(x) and q(x) are known functions of the coordinate x.
uo and QL are known parameters.
L is the size of the one dimensional domain of the problem.
When the specified values of uo and QL are nonzero the
boundary conditions are said to be nonhomogeneous
When uo =0 and QL =0 the boundary conditions are said to
be homoheneous](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-3-320.jpg)
![Weighted Residual Methods
It follows that:
Multiplying this by a weight function w and integrating over the
whole domain we obtain:
Some of the most commonly used weighted residual methods are
Method of Point Collocation,
Method of Least squares,
Method of Subdomain Collocation and
Galerkin’s method
R
q
U
L
]
[
1
0
0
)
]
[
( dx
w
q
u
L](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-7-320.jpg)
![4.2 Approximating Function
• U is called trial function and V is called test function
• As the differential operator L[u] is second order
• Therefore we can see U as element of a finite-diemnsional
subspace of the infinite-dimensional function space C2(0,1)
• The same way
)
1
,
0
(
)
1
,
0
( 2
2
C
U
C
u
)
1
,
0
(
)
1
,
0
( 2
C
S
U N
)
1
,
0
(
)
1
,
0
(
ˆ 2
L
S
V N
](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-10-320.jpg)
![• Replacing v and u with respectively V and U (2) becomes
• r(x) is called the residual (as the name of the method suggests)
• The vanishing inner product shows that the residual is orthogonal to all
functions V in the test space.
q
U
L
x
r
S
V
r
V N
]
[
)
(
ˆ
,
0
)
,
(
The Residual](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-11-320.jpg)
![• Substituting into
and exchanging summations and integrals we obtain
• As the inner product equation is satisfied for all choices of V in SN
the above equation has to be valid for all choices of dj which implies
that
The Residual
N
j
j
j x
d
x
V
1
)
(
)
( y 0
)
]
[
,
(
q
U
L
V
N
j
d
q
U
L
d j
N
j
j
j ,
...
,
2
,
1
,
0
)
]
[
,
(
1
y
N
j
q
U
L
j ,
...
,
2
,
1
0
)
]
[
,
(
y](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-12-320.jpg)
![• One obvious choice of would be taking it equal to
• This Choice leads to the Galerkin’s Method
• This form of the problem is called the strong form of the problem.
Because the so chosen test space has more continuity than
necessary.
• Therefore it is worthwile for this and other reasons to convert the
problem into a more symmetrical form
• This can be acheived by integrating by parts the initial strong form
of the problem.
Galerkin’s Method
j
y j
f
N
j
q
U
L
j ,
...
,
2
,
1
0
)
]
[
,
(
f](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-13-320.jpg)
![• Let us remember the initial form of the problem
• Integrating by parts
The Weak Form
dx
q
zu
pu
v
q
u
L
v
1
0
]
)'
'
(
[
)
]
[
,
(
.
0
)
1
(
)
0
(
1
0
),
(
)
(
)
)
(
(
]
[
u
u
x
x
q
u
x
z
dx
du
x
p
dx
d
u
L
0
'
)
'
'
(
]
)'
'
(
[
1
0
1
0
1
0
vpu
dx
vq
vzu
pu
v
dx
q
zu
pu
v](https://image.slidesharecdn.com/3-220919122215-9be31eb2/85/3-Weighted-residual-methods-1-pptx-14-320.jpg)
























































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)











