The document discusses transient stability analysis and the equal area criterion method. It provides:
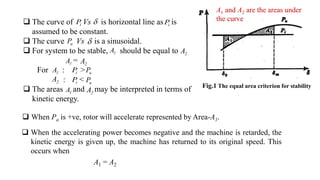
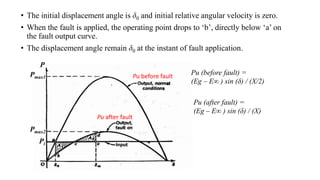
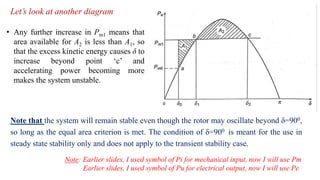
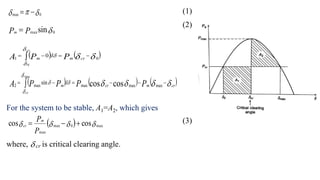
1) An overview of transient stability studies and the equal area criterion, which is a graphical method to determine stability by ensuring the accelerating and decelerating areas under the generator swing curve are equal.
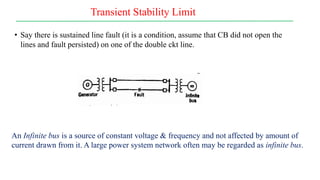
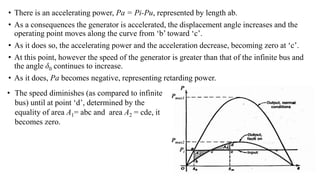
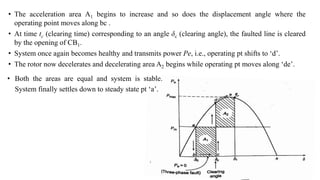
2) An example application of the equal area criterion to analyze the stability of a two-machine system during a fault by examining the accelerating and decelerating power areas.
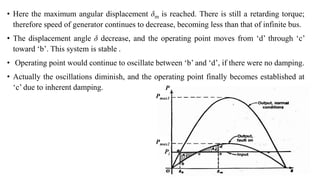
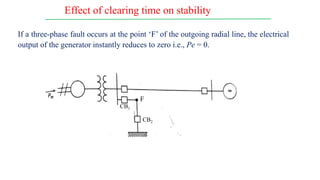
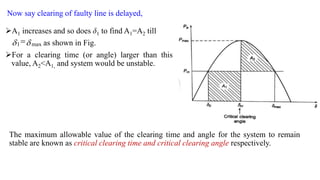
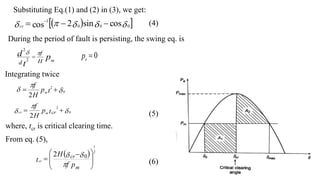
3) A discussion of how clearing time impacts stability, with the critical clearing time defined as the maximum fault clearing time that ensures the areas remain equal and the system remains stable.