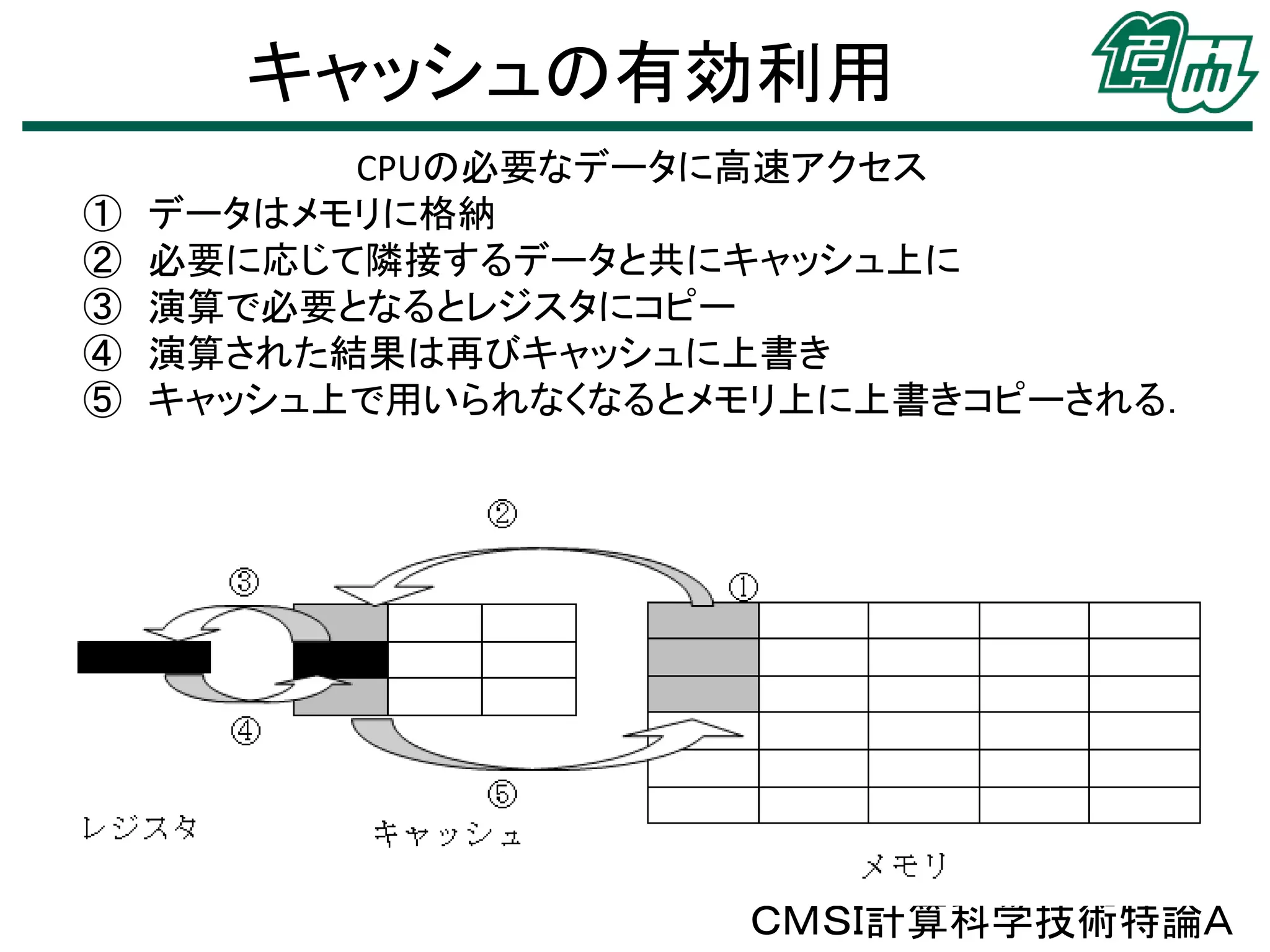
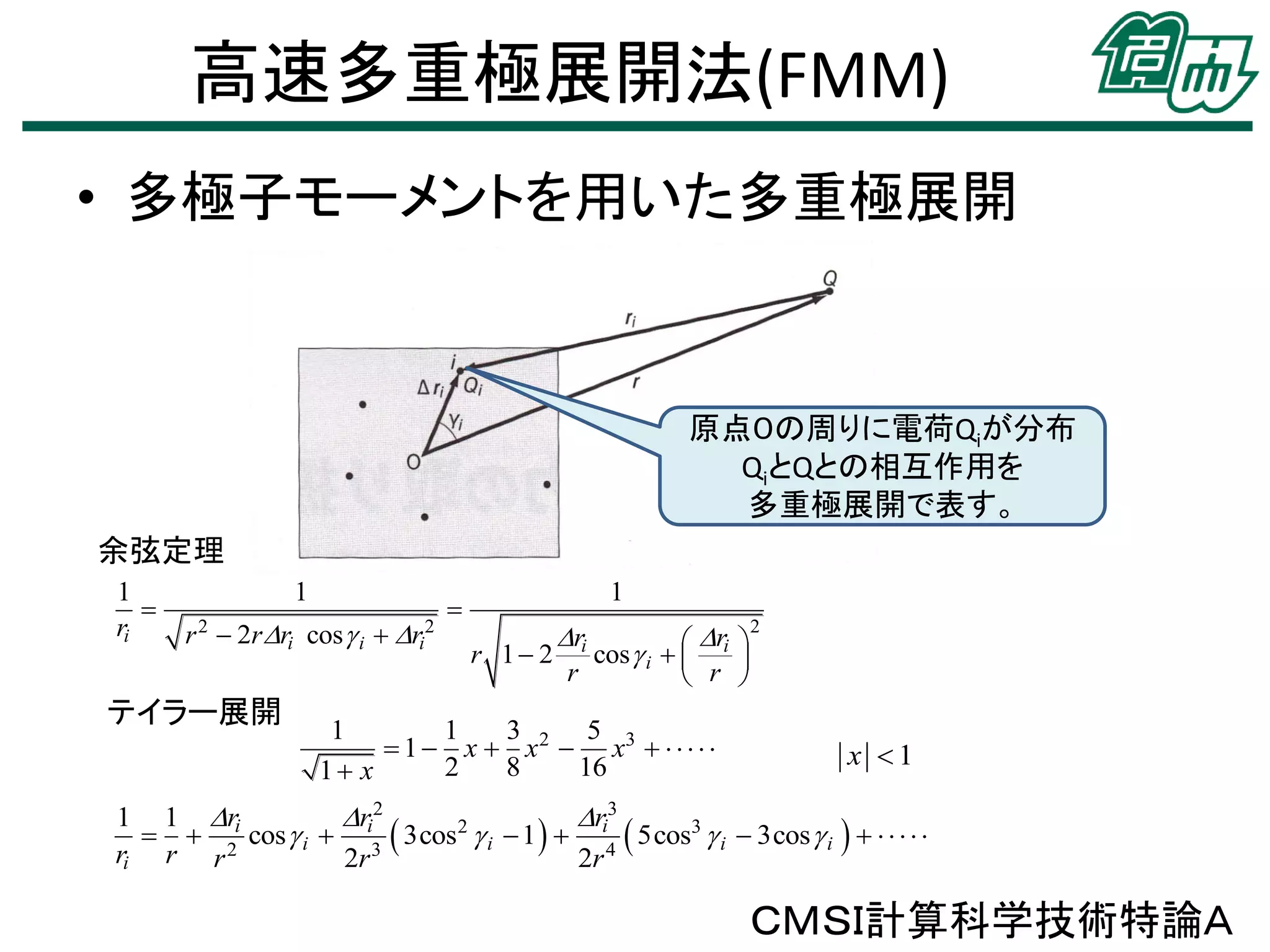
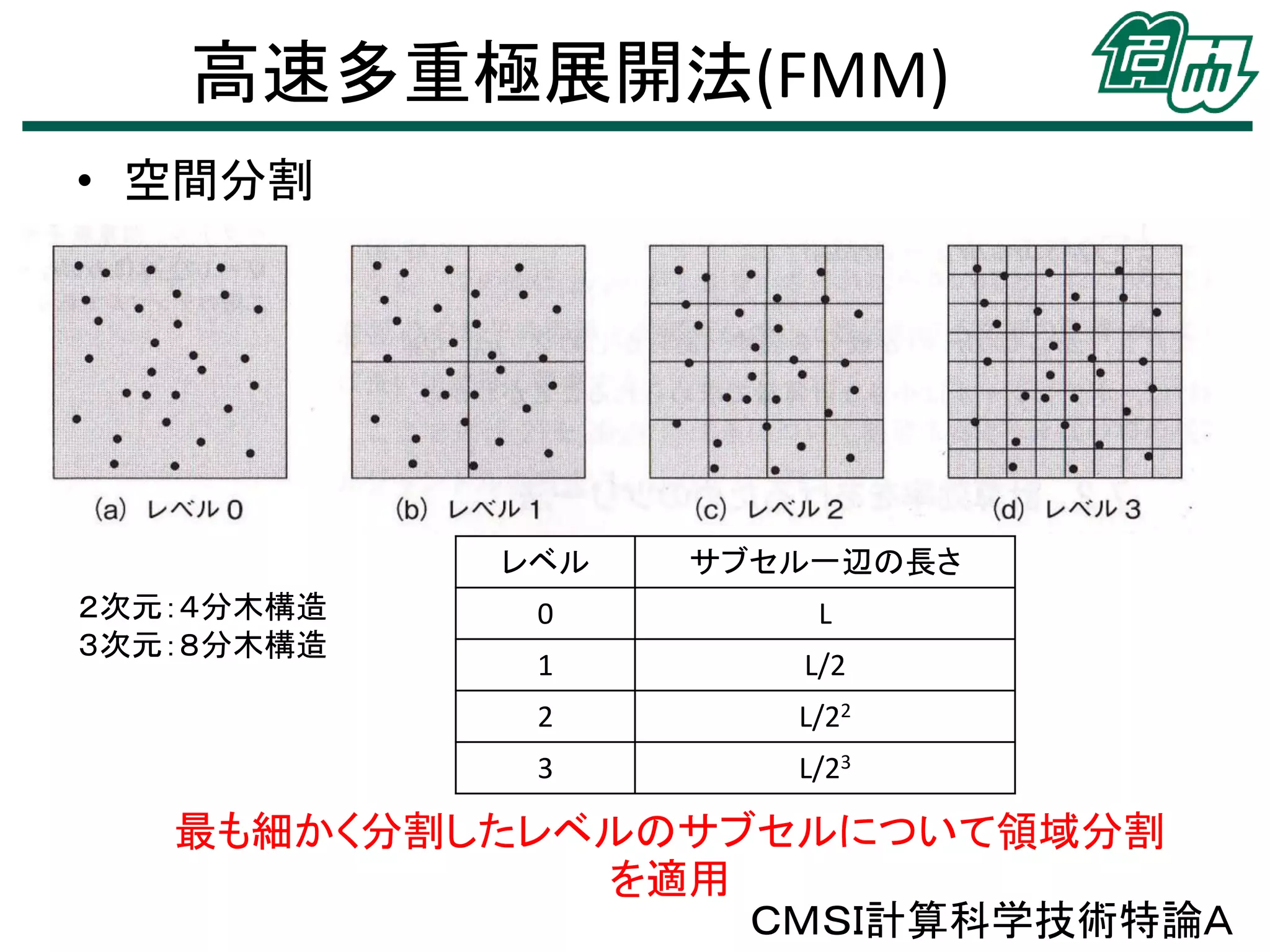
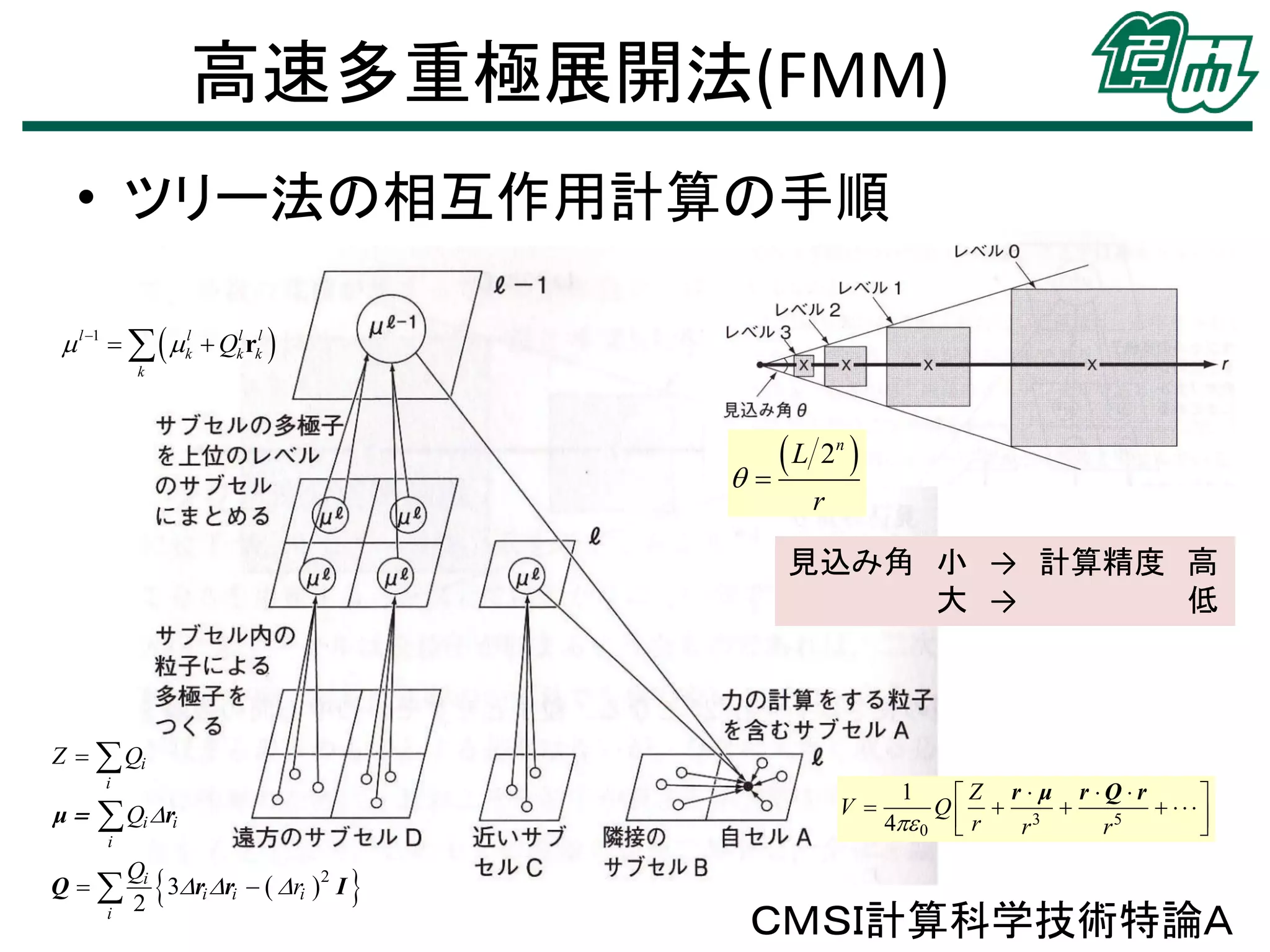
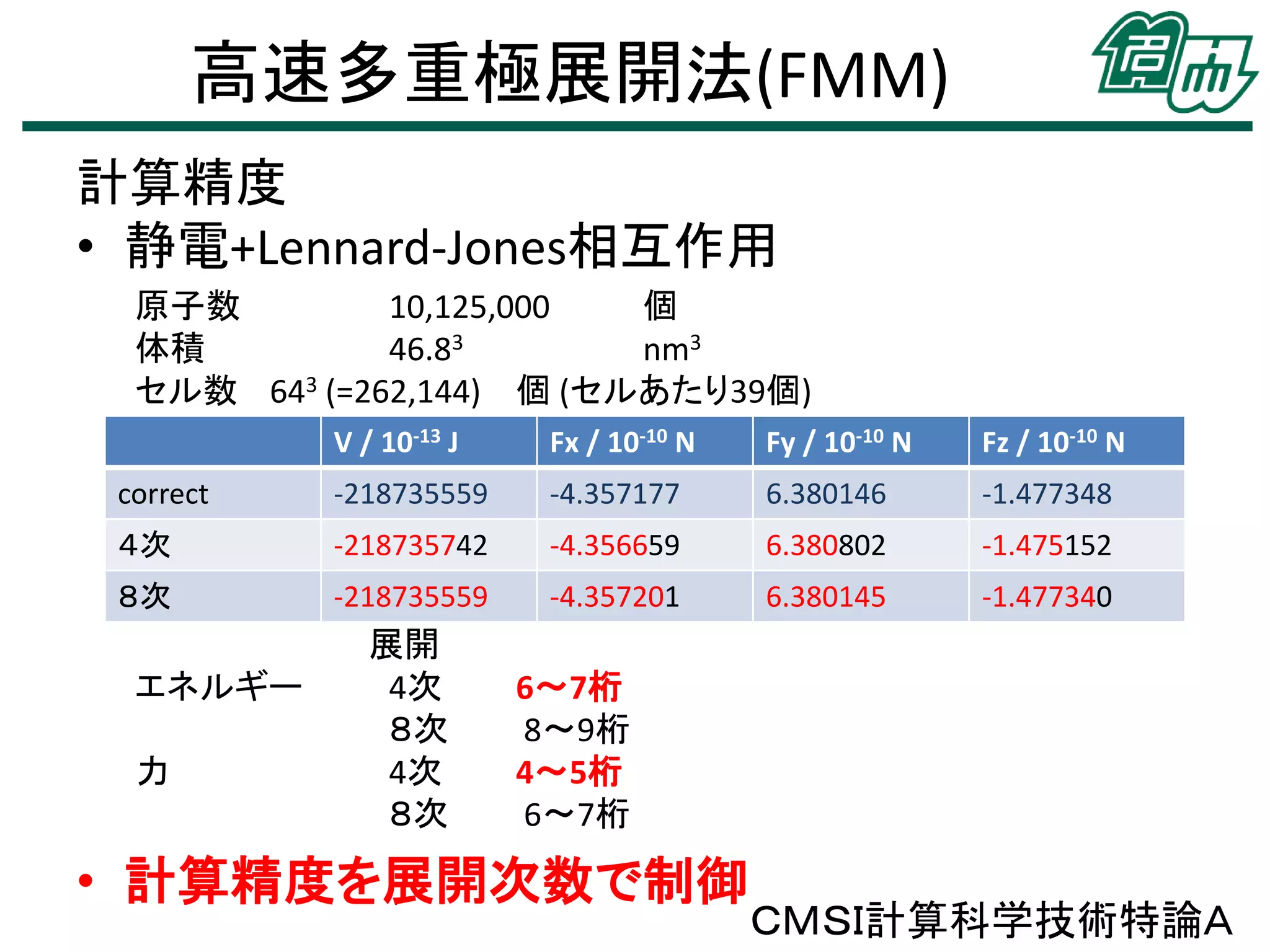
高速多重極展開法(FMM)
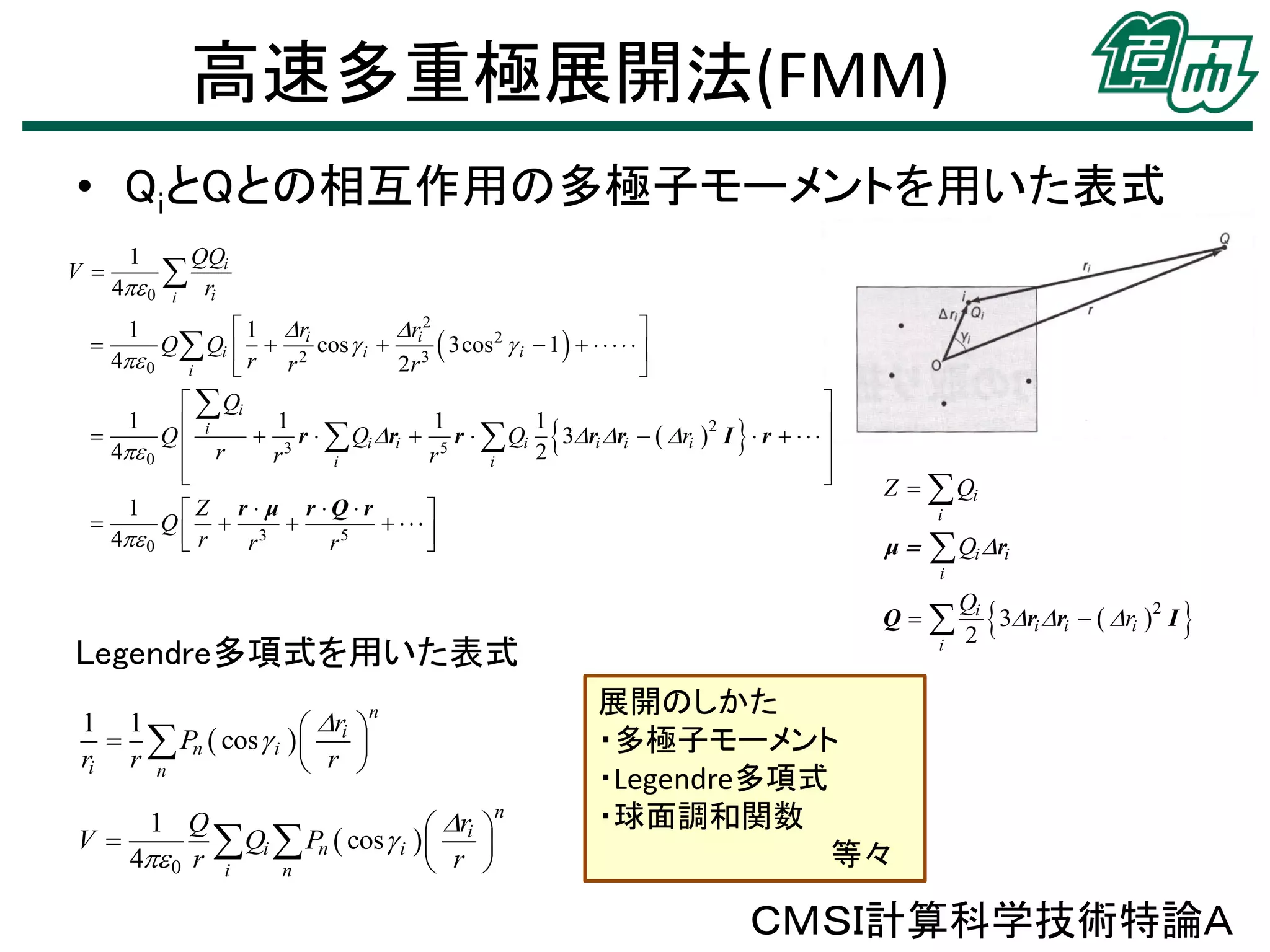
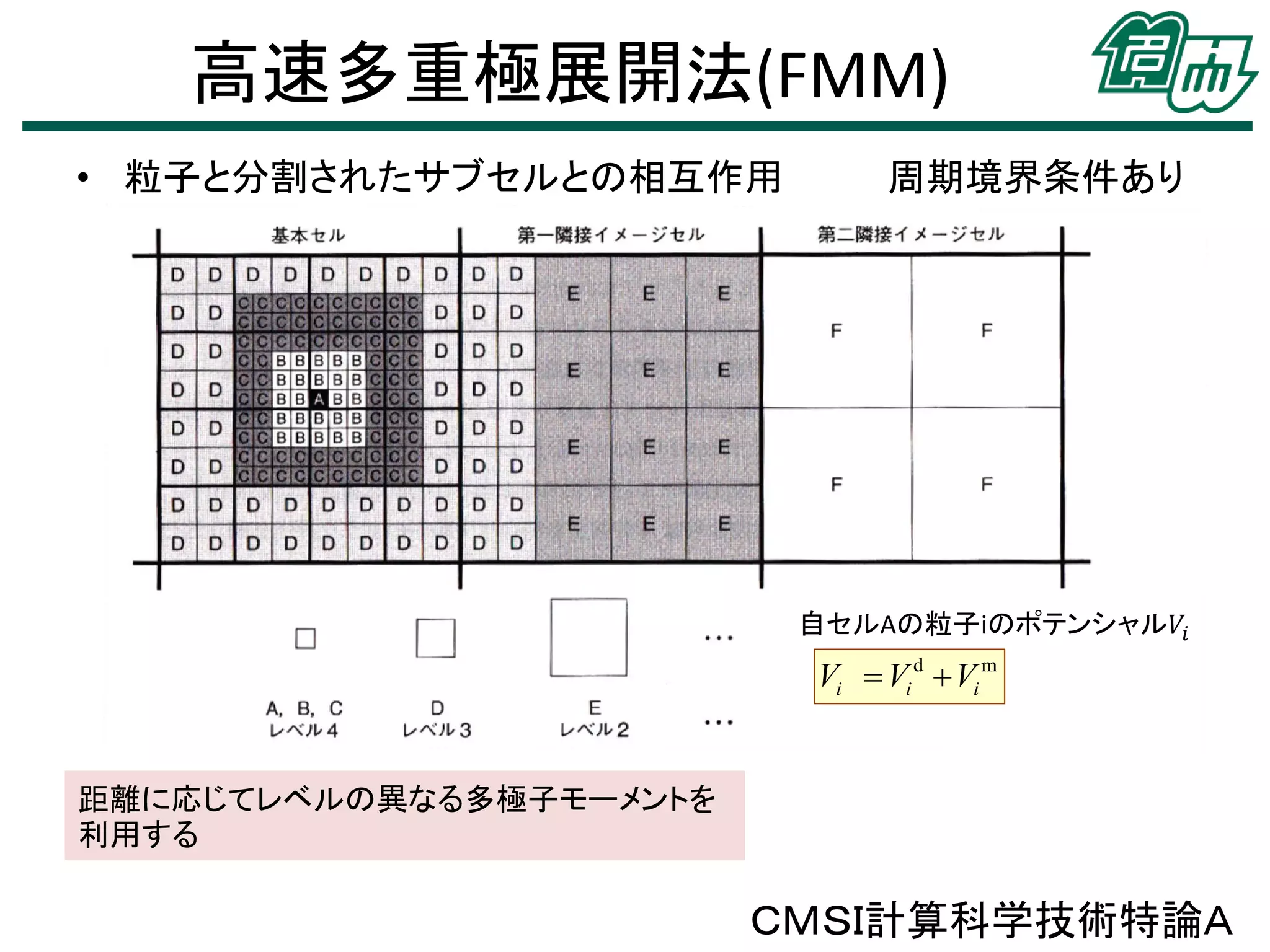
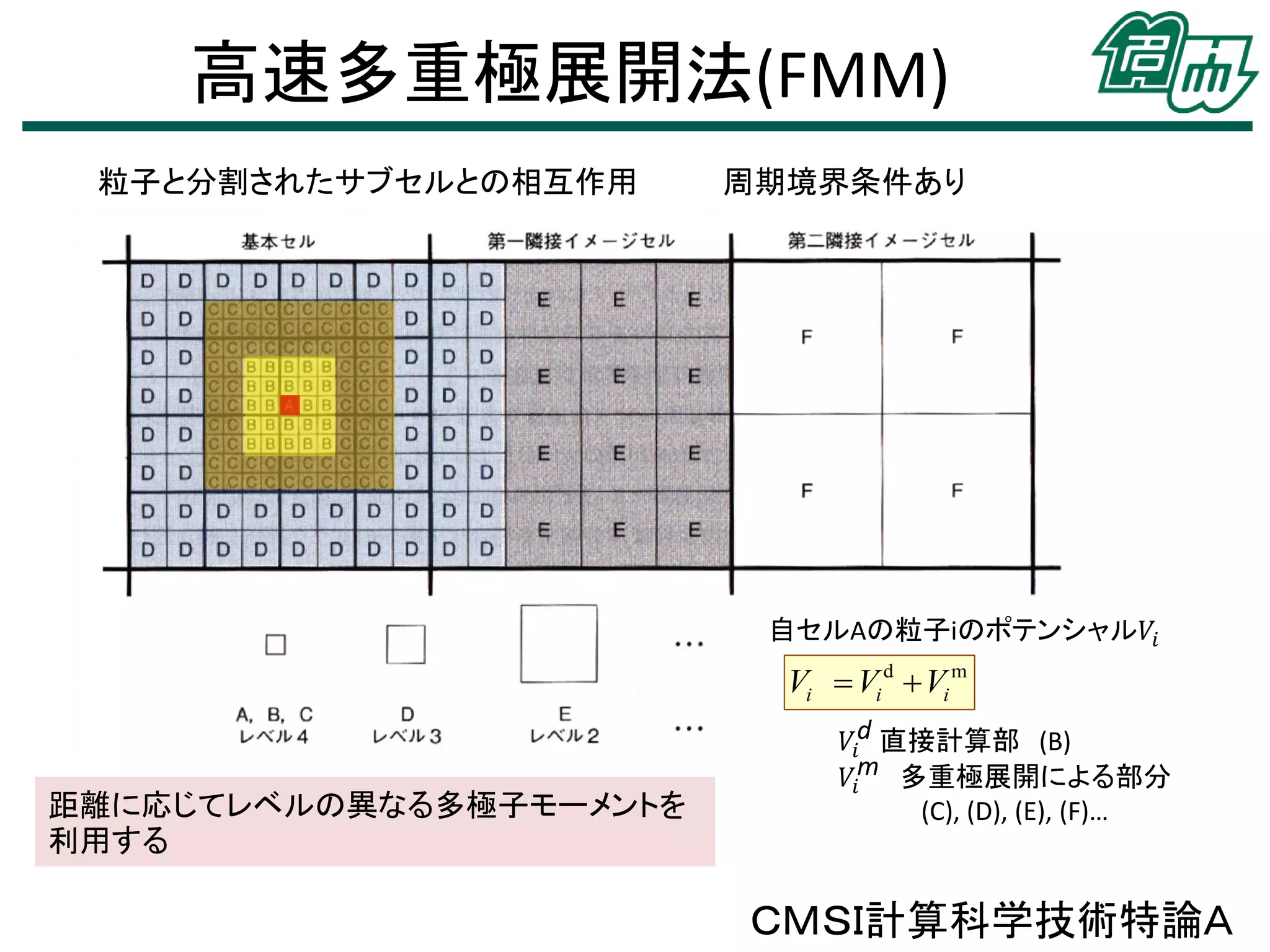
• QiとQとの相互作用の多極子モーメントを用いた表式
V
1
40
i
QQi
ri
1 r
r 2
Q Qi 2i cos i i3 3cos 2 i 1
4 0 i
2r
r r
Qi
1
1
1
1
2
i
Q
3 r Qi ri 5 r Qi 3ri ri ri I r
r
4 0
2
r
r
i
i
1
Z r μ r Q r
Q 3
5
r
4 0
r
r
1
Z Qi
i
μ
Qi ri
i
Legendre多項式を用いた表式
n
1 1
ri
P cos i
ri r n
r
n
n
1 Q
ri
V
Q P cos i
4 0 r i n
r
i
n
Q
i
Qi
2
3ri ri ri I
2
展開のしかた
・多極子モーメント
・Legendre多項式
・球面調和関数
等々
CMSI計算科学技術特論A
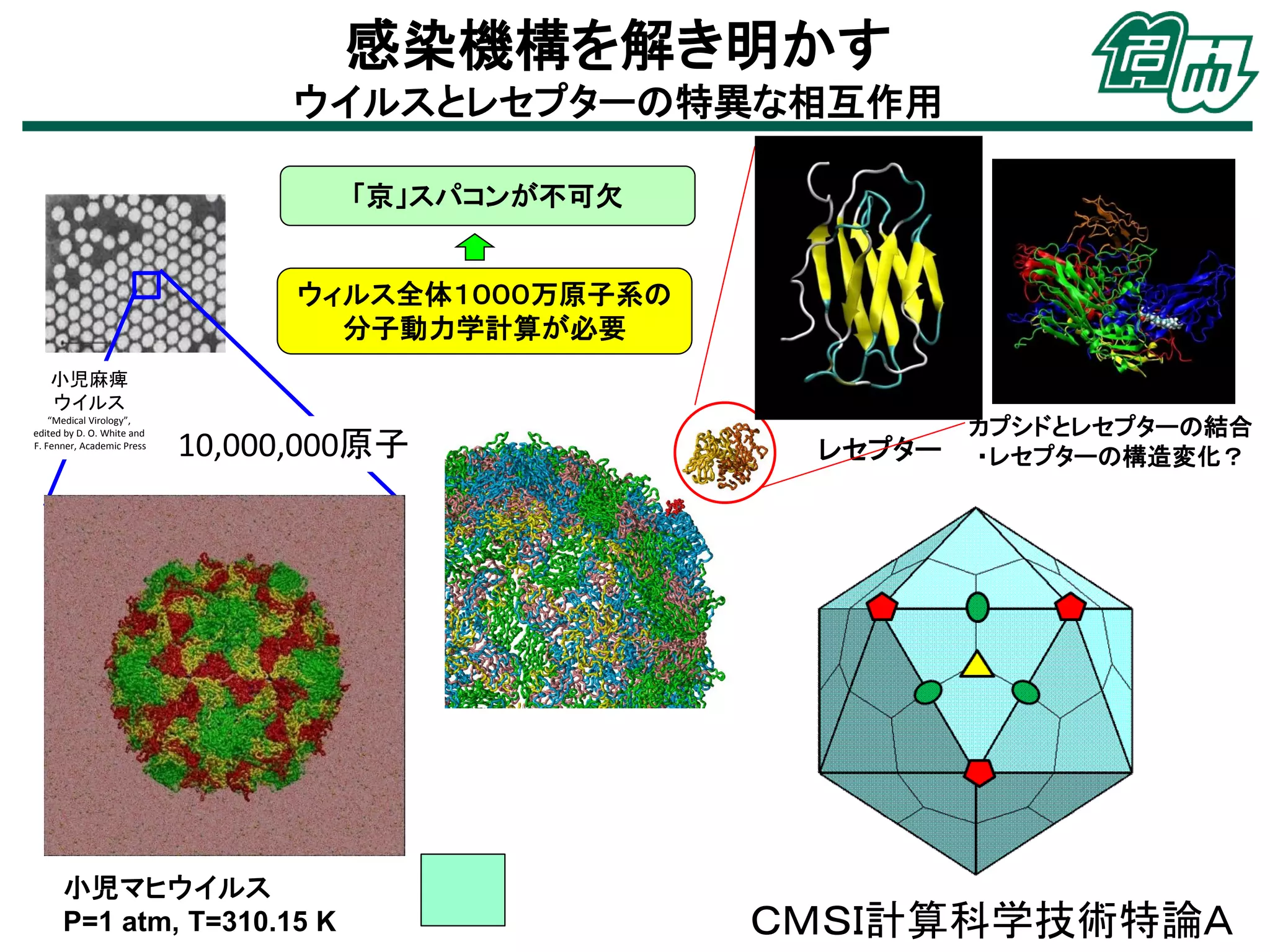
ベンチマークテスト
MODYLAS
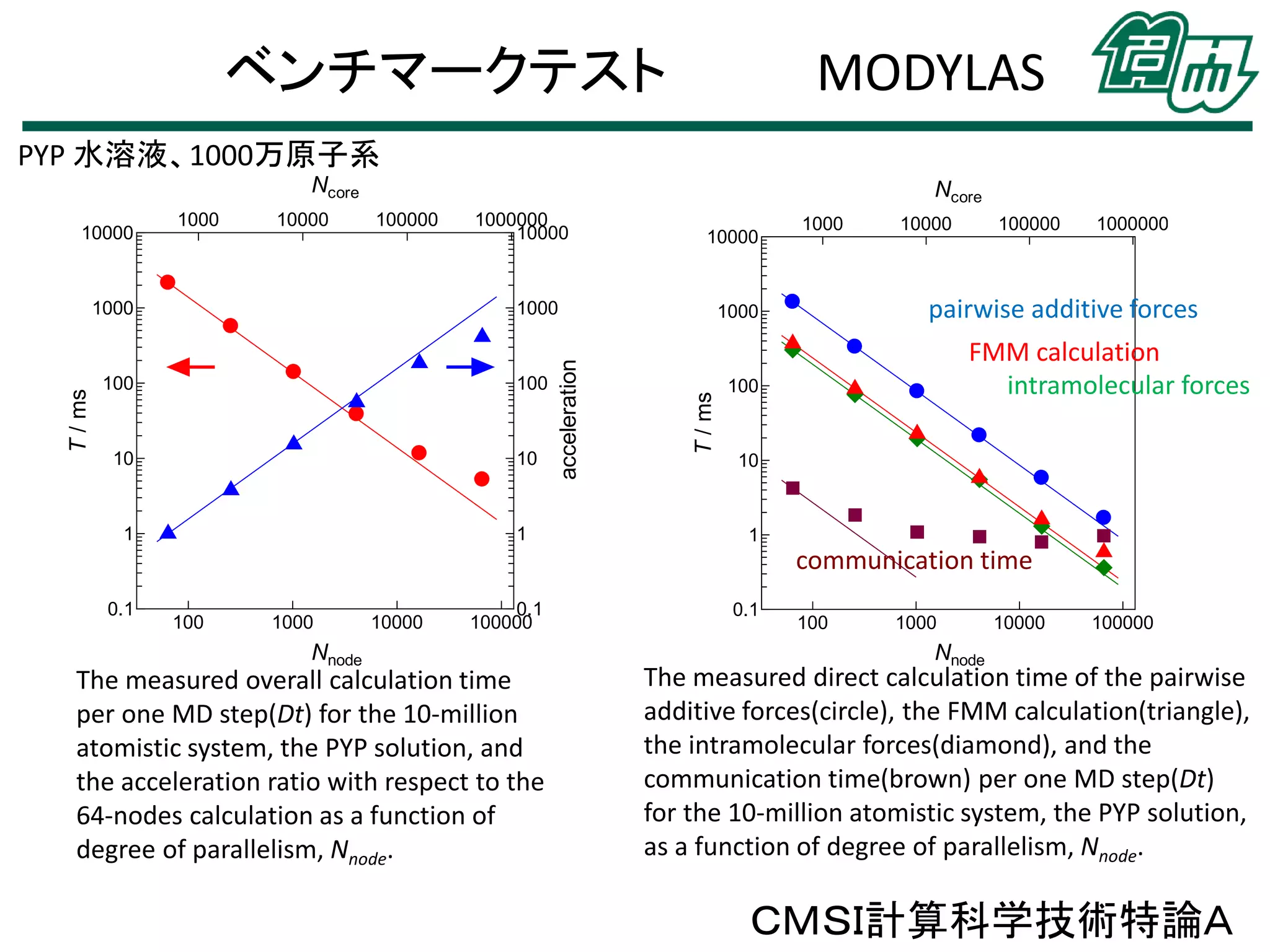
PYP 水溶液、1000万原子系
Ncore
1000
10000
100000
1000
100
100
10
10
1
T /ms
10000
1
1000
10000
100000
1000000
pairwise additive forces
1000
T / ms
1000
1000000
10000
acceleration
10000
Ncore
FMM calculation
intramolecular forces
100
10
1
communication time
0.1
100
1000
Nnode
10000
0.1
100000
The measured overall calculation time
per one MD step(Dt) for the 10-million
atomistic system, the PYP solution, and
the acceleration ratio with respect to the
64-nodes calculation as a function of
degree of parallelism, Nnode.
0.1
100
1000
10000
100000
Nnode
The measured direct calculation time of the pairwise
additive forces(circle), the FMM calculation(triangle),
the intramolecular forces(diamond), and the
communication time(brown) per one MD step(Dt)
for the 10-million atomistic system, the PYP solution,
as a function of degree of parallelism, Nnode.
CMSI計算科学技術特論A
参考文献
MD全般
• D. Frenkel,B. Smit,“Understanding Molecular Simulation," Academic Press, San Diego(1996).
• 上田 顕,「コンピュータシミュレーション」,朝倉書店(1990).
• M. P. Allen, D. J. Tildesley,“ Computer Simulation of Liquids," Oxford Science, Oxford(1987).
• J. P. Hansen, I. R. McDonald, “Theory of Simple Liquids," Academic Press, London(1986).
• 岡崎 進, 吉井 範行, コンピュータ・シミュレーションの基礎(第2版), 化学同人(2011).
力学
• H. Goldstein,「ゴールドスタイン新版古典力学(上),(下)」(瀬川富士,矢野 忠,江沢康生 訳),
吉岡書店(1983).
数値積分
• G. J. Martyna, M. E. Tuckerman, D. J. Tobias, M. L. Klein, Mol. Phys., 87,1117(1996).
Particle mesh Ewald法
• T. Darden, D. York, L. Pedersen, J. Chem. Phys., 98,10089(1993).
FMM
• L. Greengard, V. Rokhlin, J. Comput. Phys., 73,325(1987).
SHAKE
• G. Ciccotti, J. P. Ryckaert, Comp. Phys. Rep., 4,345(1986).
• P. Gonnet, J. Comput. Phys. 220, 740(2007).
MODYLAS
• Y. Andoh, et al., J. Chem. Theory Comput. 9, 3201( 2013)
CMSI計算科学技術特論A


![MODYLAS
MODYLAS: MOlecular DYnamics simulation software for LArge System
開発者
安藤嘉倫, 吉井範行, 藤本和士, 水谷圭祐,小嶋秀和, 山田
篤志, 岡崎 進(名古屋大学)
川口一朋, 長尾秀実 (金沢大学)
岩橋建輔, 水谷文保 (分子科学研究所)
南 一生 (理化学研究所)
中川敦史 (大阪大学)
市川真一, 小松秀美, 石附 茂, 武田康宏,
福島正雄 (富士通)
開発協力 [敬称略]
泰岡 顕治 (慶大), 成見 哲 (電通大)
篠田 渉 (産総研), 渡辺宙志(東大)
川井 敦(K&F Computing Research)
CMSI計算科学技術特論A](https://image.slidesharecdn.com/0711yoshii-140116224441-phpapp01/75/CMSI-A-13-2-31-2048.jpg)
![計算内容
系の構成
分子動力学計算
・カプシドタンパク質
VP1, VP2, VP3, VP4 おのおの 60 個
PDB-ID: 1HXS [分解能 2.2 Å]
・力場
CHARMM22・36 with CMAP
TIP3P
・ポケットファクター
スフィンゴミエリン
・粒子間相互作用
Lennard-Jones: 12 Å カットオフ
Coulomb: 高速多重極展開法 (FMM)
・カウンターイオン Na+, K+, Cl系の総電荷 0, かつ PBS 緩衝液濃度を再現
・水
カプシド殻内外 (バルク), および結晶水
総原子数
6,480,326
水素原子を含む全原子計算
・アンサンブル
NPT (P: 1気圧, T: 310.15 K)
・計算機
京コンピュータ
・ソフトウェア
MODYLAS
・2012年9月―2013年4月で 200 ns の計算を終了](https://image.slidesharecdn.com/0711yoshii-140116224441-phpapp01/75/CMSI-A-13-2-36-2048.jpg)




![[DL輪読会]GANとエネルギーベースモデル](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar20200828-210519065921-thumbnail.jpg?width=640&height=640&fit=bounds)












































































